You might also like
- Tia TSB 140 2004Document28 pagesTia TSB 140 2004k1gabitzu9789No ratings yet
- 1.1 Dram Types and Operation: - Each Address Input Is Connected To An On-ChipDocument33 pages1.1 Dram Types and Operation: - Each Address Input Is Connected To An On-Chipjose padillaNo ratings yet
- Ardf TX 80m PCB 2013 Mile Kokotov Bd139 Final So Izmeni NajnovDocument1 pageArdf TX 80m PCB 2013 Mile Kokotov Bd139 Final So Izmeni Najnovag1tatorNo ratings yet
- Fast Cmos Octal Registered Transceivers: IDT29FCT52AT/BT/CT/DT IDT29FCT2052AT/BT/CT IDT29FCT53AT/BT/CTDocument8 pagesFast Cmos Octal Registered Transceivers: IDT29FCT52AT/BT/CT/DT IDT29FCT2052AT/BT/CT IDT29FCT53AT/BT/CTStuxnetNo ratings yet
- Wire Less Stepper Motor Controll Using MicrocontrollerDocument51 pagesWire Less Stepper Motor Controll Using MicrocontrollerAnil ReddyNo ratings yet
- Hitachi c21-Rf80s Chassis 3p31Document55 pagesHitachi c21-Rf80s Chassis 3p31chamal5280No ratings yet
- TMOD1 - EN - v1.0.2018 PARTIAL HANDDocument2 pagesTMOD1 - EN - v1.0.2018 PARTIAL HANDEsaRidho SambadaNo ratings yet
- TK5530Document8 pagesTK5530Triple PuzleNo ratings yet
- Ks0105 32 CH Common Driver For Dot Matrix LCD: C C C CDocument8 pagesKs0105 32 CH Common Driver For Dot Matrix LCD: C C C CMaikol DominguezNo ratings yet
- Datasheet Sam9g20Document798 pagesDatasheet Sam9g20youane bayouNo ratings yet
- Report Time: Mar-19-2020, 15:49:10 (SIG1983 - H (ch2, ch1) ) : Active TabDocument4 pagesReport Time: Mar-19-2020, 15:49:10 (SIG1983 - H (ch2, ch1) ) : Active Tabpalla mounicaNo ratings yet
- Report Time: Mar-19-2020, 15:49:10 (SIG1983 - H (ch2, ch1) ) : Active TabDocument4 pagesReport Time: Mar-19-2020, 15:49:10 (SIG1983 - H (ch2, ch1) ) : Active Tabpalla mounicaNo ratings yet
- TMS370Cx5x 8-Bit Microcontroller: FN / FZ Package (Top View)Document75 pagesTMS370Cx5x 8-Bit Microcontroller: FN / FZ Package (Top View)Carlos Luis ColmenaresNo ratings yet
- Reinforcement Details of Raft Plan Fondation Plan: C4 C4 C5 C6 C6Document4 pagesReinforcement Details of Raft Plan Fondation Plan: C4 C4 C5 C6 C6Rama KrishnaNo ratings yet
- Low Cost Digital Panel Meter Designs and Complete Instructions For LCD and LED KitsDocument8 pagesLow Cost Digital Panel Meter Designs and Complete Instructions For LCD and LED KitsEddie MarinNo ratings yet
- Collision Drive Building DocsDocument7 pagesCollision Drive Building DocsMarcosGuitar1928No ratings yet
- Microcontroller Bootcamp (4) : User InterfacesDocument8 pagesMicrocontroller Bootcamp (4) : User InterfacesMikko FagerlundNo ratings yet
- Processor Intro PPTDocument36 pagesProcessor Intro PPTChand1891No ratings yet
- PDF Datasheet 7432 or PDF - CompressDocument9 pagesPDF Datasheet 7432 or PDF - CompressfurnitureartmabqNo ratings yet
- 64Ch Segment Driver For Dot Matrix LCDDocument30 pages64Ch Segment Driver For Dot Matrix LCDDefrimon AlhaviqiNo ratings yet
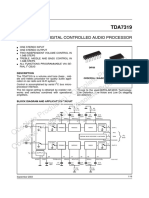
- TDA7319 STMicroelectronics PDFDocument16 pagesTDA7319 STMicroelectronics PDFdariohot21No ratings yet
- Regin Regio Midi EngDocument2 pagesRegin Regio Midi EngMc EswaranNo ratings yet
- Socket For 5-Pin RelaysDocument4 pagesSocket For 5-Pin RelaysLikabeus EirlNo ratings yet
- IDT74FST3390 Octal 2:1 Multiplexer Bus Switch: FeaturesDocument5 pagesIDT74FST3390 Octal 2:1 Multiplexer Bus Switch: FeaturesspotNo ratings yet
- Untitled PDFDocument1 pageUntitled PDFBajak LautNo ratings yet
- University of Gondar Institute of TechnologyDocument24 pagesUniversity of Gondar Institute of TechnologyamareNo ratings yet
- Anderson Bridge ExperimentDocument5 pagesAnderson Bridge Experimentsachin singh NegiNo ratings yet
- Report Time: Mar-20-2020, 11:17:33 (SIG1985 - H (ch2, ch1) ) : Active TabDocument4 pagesReport Time: Mar-20-2020, 11:17:33 (SIG1985 - H (ch2, ch1) ) : Active Tabpalla mounicaNo ratings yet
- Report Time: Mar-20-2020, 11:17:33 (SIG1985 - H (ch2, ch1) ) : Active TabDocument4 pagesReport Time: Mar-20-2020, 11:17:33 (SIG1985 - H (ch2, ch1) ) : Active Tabpalla mounicaNo ratings yet
- Digital System Design 1 - Chapter 9 SlideDocument24 pagesDigital System Design 1 - Chapter 9 Slide42200405No ratings yet
- Camfix Std.Document1 pageCamfix Std.alecandro_90No ratings yet
- Basics of COA: 1. (MCQ) (GATE-2023: 2M)Document69 pagesBasics of COA: 1. (MCQ) (GATE-2023: 2M)dzz9wt7x9kNo ratings yet
- TLC1542C, TLC1542I, TLC1542M, TLC1542Q, TLC1543C, TLC1543I, TLC1543Q 10-Bit Analog-To-Digital Converters With Serial Control and 11 Analog InputsDocument27 pagesTLC1542C, TLC1542I, TLC1542M, TLC1542Q, TLC1543C, TLC1543I, TLC1543Q 10-Bit Analog-To-Digital Converters With Serial Control and 11 Analog InputsCarlos Alberto de Andrade Freitas JuniorNo ratings yet
- Low Cost Digital Panel Meter Designs and Complete Instructions For LCD and LED KitsDocument9 pagesLow Cost Digital Panel Meter Designs and Complete Instructions For LCD and LED KitsLucía MitchellNo ratings yet
- Eclipse Solid State Antenna Switch Unit: Typical Performance - Rated To 100 WattsDocument2 pagesEclipse Solid State Antenna Switch Unit: Typical Performance - Rated To 100 WattsThanh Kieu TienNo ratings yet
- Arcade CommanderDocument5 pagesArcade CommanderDavid BrownNo ratings yet
- ConfidencialDocument2 pagesConfidencialsandro costaNo ratings yet
- Block DiagramDocument1 pageBlock DiagramLuis Alberto ArizaNo ratings yet
- A 40 Meters CW QRP Transceiver: How It Is MadeDocument7 pagesA 40 Meters CW QRP Transceiver: How It Is MadeClaudio BernardoniNo ratings yet
- Frequenzimetro Eng 2003Document4 pagesFrequenzimetro Eng 2003Onutza Oana100% (2)
- Sound Sensor 2.0: R3 30K R7 10KDocument1 pageSound Sensor 2.0: R3 30K R7 10KJose Aviles PachecoNo ratings yet
- DFR0034SCH V2.0 - Schematic PDFDocument1 pageDFR0034SCH V2.0 - Schematic PDFjoxNo ratings yet
- DFR0034SCH V2.0 PDFDocument1 pageDFR0034SCH V2.0 PDFFelipe GarciaNo ratings yet
- Steval cbl005v1Document4 pagesSteval cbl005v1leo valentineNo ratings yet
- Timer Interrupts: Arduino, ESP8266 & Raspberry Pi StuffDocument62 pagesTimer Interrupts: Arduino, ESP8266 & Raspberry Pi StuffMike Thomson100% (1)
- Vutron Building DocsDocument7 pagesVutron Building DocsStani-Slav JanáčNo ratings yet
- Banan Pi BPI-R1 MP Schematic-SD - V3-20140922Document14 pagesBanan Pi BPI-R1 MP Schematic-SD - V3-20140922Tuan AnhNo ratings yet
- CQM1 OC222 Operation ManualDocument1 pageCQM1 OC222 Operation ManualRoberto Carlos GalavisNo ratings yet
- BMW I-Bus Interface AdapterDocument1 pageBMW I-Bus Interface AdapterDavid ALVESNo ratings yet
- Ec-Pdc Lab ManualDocument88 pagesEc-Pdc Lab ManualSanjitha KurugantiNo ratings yet
- Theremin SchematicsDocument1 pageTheremin SchematicsKkillurNo ratings yet
- AT89 Series Hardware DescriptionDocument33 pagesAT89 Series Hardware Descriptiongray0132No ratings yet
- 3-Phase Brushless Fan Motor DriverDocument30 pages3-Phase Brushless Fan Motor DriverAravind Prasad Sounder RajNo ratings yet
- Hoverboard 6 Mekotron hb-0060k E-Board Repair InfoDocument7 pagesHoverboard 6 Mekotron hb-0060k E-Board Repair InfoElison QuezadaNo ratings yet
- Pic Mini WebDocument15 pagesPic Mini WebSizwe Martin ZithaNo ratings yet
- Compact: Modular and High-Performance PLC SystemDocument4 pagesCompact: Modular and High-Performance PLC SystemLuis ParcoNo ratings yet
- New VIC-T300C User Manual Refreshed)Document16 pagesNew VIC-T300C User Manual Refreshed)cesarnamucheNo ratings yet
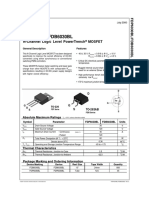
- Fdp6030Bl/Fdb6030Bl: N-Channel Logic Level Powertrench MosfetDocument10 pagesFdp6030Bl/Fdb6030Bl: N-Channel Logic Level Powertrench Mosfetfox7878No ratings yet
- Tutorial (Unit 2)Document17 pagesTutorial (Unit 2)Prince JunejaNo ratings yet
- AN4214 Application Note: High Power Factor Flyback Converter Using The L6564Document37 pagesAN4214 Application Note: High Power Factor Flyback Converter Using The L6564GreenoceanNo ratings yet
- Practice Energy CalculationsDocument5 pagesPractice Energy CalculationsJohn OsborneNo ratings yet
- Transformer Protection Worked ExamplesDocument8 pagesTransformer Protection Worked Exampleselhaffar100% (3)
- Elektra User ManualDocument51 pagesElektra User ManualSaleem A. KhanNo ratings yet
- Easy9 Enclosures EZ9ET12LDocument2 pagesEasy9 Enclosures EZ9ET12LGANGA DHARANNo ratings yet
- Sinumerik Sinumerik 840D SL NCU 7x0.2Document112 pagesSinumerik Sinumerik 840D SL NCU 7x0.2qdarioNo ratings yet
- Professional Summary: DC Generators in RailwaysDocument28 pagesProfessional Summary: DC Generators in RailwaysDharini KrishnanNo ratings yet
- Lec1 Notes PLCDocument3 pagesLec1 Notes PLCmayarm802No ratings yet
- Helukabel Power CablesDocument17 pagesHelukabel Power CablesperijoyNo ratings yet
- BT06019 PDFDocument48 pagesBT06019 PDFRouni AñazcoNo ratings yet
- Microwave YIGDocument38 pagesMicrowave YIGgabrielpicaNo ratings yet
- Iec 62388Document206 pagesIec 62388Jeong Phill KimNo ratings yet
- LM331Document6 pagesLM331Elzan AgungNo ratings yet
- E24 Series Heavy Duty Counter Equipments: Hot-Plates / Food Warmer / Griddles / FryersDocument16 pagesE24 Series Heavy Duty Counter Equipments: Hot-Plates / Food Warmer / Griddles / FryersJonathan FajardoNo ratings yet
- Blackbody Lab ReportDocument2 pagesBlackbody Lab Reportkashawna fujiwaraNo ratings yet
- Lombardo Tarifa de Precios Octubre 2022Document162 pagesLombardo Tarifa de Precios Octubre 2022VEMATELNo ratings yet
- Lecture Notes 25Document10 pagesLecture Notes 25Aung NetflixNo ratings yet
- Kohler Gas Generator 60rzgDocument4 pagesKohler Gas Generator 60rzgPankaj KambleNo ratings yet
- Lab1 (TE) - Multimeter-N1 - 240311 - 113129Document9 pagesLab1 (TE) - Multimeter-N1 - 240311 - 113129thivaa2703No ratings yet
- Amc 1117Document9 pagesAmc 1117Hoang LeNo ratings yet
- Electrical Power Distribution SystemDocument3 pagesElectrical Power Distribution SystemmshahidshaukatNo ratings yet
- JNTU Old Question Papers 2007Document8 pagesJNTU Old Question Papers 2007Srinivasa Rao G100% (1)
- Parallel Inverter: Power ElectronicsDocument10 pagesParallel Inverter: Power ElectronicsKiran SmathNo ratings yet
- Heat Shrinking AllDocument46 pagesHeat Shrinking AllCaylie KirbyNo ratings yet
- Average Power Sensor Uncertainty Calculator Rev8Document4 pagesAverage Power Sensor Uncertainty Calculator Rev8dragelaNo ratings yet
- Supercapacitor PHD ThesisDocument8 pagesSupercapacitor PHD Thesispuzinasymyf3100% (2)