You might also like
- Solution Manual For Modern Semiconductor Devices For Integrated Circuits 1st Ed - Chenming C. HuDocument18 pagesSolution Manual For Modern Semiconductor Devices For Integrated Circuits 1st Ed - Chenming C. Hu일팔일공일오이오 윤현서0% (1)
- COBOL Quick RefresherDocument39 pagesCOBOL Quick Refresherpeeyush_pce2010No ratings yet
- Matlab PPT 2Document41 pagesMatlab PPT 2Bhupendra YadavNo ratings yet
- Digital Image Processing IntroductionDocument123 pagesDigital Image Processing IntroductionDeepa SNo ratings yet
- Iso 1660 2017 en PDFDocument11 pagesIso 1660 2017 en PDFLeonardo MIRELESNo ratings yet
- Bundle AdjustmentDocument14 pagesBundle Adjustmentfaizz islammNo ratings yet
- 28 Oveja - Quentin TrollipDocument5 pages28 Oveja - Quentin TrollipJuan Carlos CocaNo ratings yet
- Camera CalibrationDocument39 pagesCamera CalibrationyokeshNo ratings yet
- Image Processing Lab ManualDocument10 pagesImage Processing Lab ManualDeepa SNo ratings yet
- Image Processing Lab ManualDocument10 pagesImage Processing Lab ManualDeepa SNo ratings yet
- Analytical & Digital PhotogrammetryDocument46 pagesAnalytical & Digital PhotogrammetryLuis Marquez Guillen100% (3)
- Viva questions on computer graphics conceptsDocument13 pagesViva questions on computer graphics conceptsJinsKJoy75% (4)
- Real Analysis Solutions Minimum PointDocument9 pagesReal Analysis Solutions Minimum PointJúnia NevesNo ratings yet
- Linear triangulation (1)Document41 pagesLinear triangulation (1)sarbjot singhNo ratings yet
- Plane-Based Calibration of A Projector-Camera SystemDocument12 pagesPlane-Based Calibration of A Projector-Camera SystemDonato FormicolaNo ratings yet
- Computer Graphics - Chapter 3 (1) - 2Document35 pagesComputer Graphics - Chapter 3 (1) - 2Sương TrầnNo ratings yet
- Autocalibration of An Ad Hoc Construction of Multi-Projector DisplaysDocument8 pagesAutocalibration of An Ad Hoc Construction of Multi-Projector DisplaysIonuț AvramescuNo ratings yet
- Hear50265 ch03Document88 pagesHear50265 ch03Suada Bőw WéěžýNo ratings yet
- Implementing DSP Algorithms Using Spartan-3 FpgasDocument4 pagesImplementing DSP Algorithms Using Spartan-3 FpgasAkshat AgrawalNo ratings yet
- Project1Report (Prakash)Document12 pagesProject1Report (Prakash)pgnepal100% (1)
- Simlote 2019 Ijca 919377 PDFDocument4 pagesSimlote 2019 Ijca 919377 PDFMegha SimloteNo ratings yet
- ITS Master 15963 Paper PDFDocument6 pagesITS Master 15963 Paper PDFAbdelrahim Hussam MoubayedNo ratings yet
- Active Intrinsic Calibration Using Vanishing PointsDocument6 pagesActive Intrinsic Calibration Using Vanishing PointsRajul RahmadNo ratings yet
- Plane-Based Calibration of A Projector-Camera SystemDocument12 pagesPlane-Based Calibration of A Projector-Camera Systemfleming3No ratings yet
- Image Pre-Processing: Ashish KhareDocument43 pagesImage Pre-Processing: Ashish KharerenukaNo ratings yet
- Introduction to Q-400 DICDocument5 pagesIntroduction to Q-400 DICAlex J. GonzálezNo ratings yet
- unit_5_computer_animationDocument8 pagesunit_5_computer_animationparatevedant1403No ratings yet
- Real-Time Visual Odometry Using Monocular Camera: Honeywell Technology Solutions Lab, BangaloreDocument6 pagesReal-Time Visual Odometry Using Monocular Camera: Honeywell Technology Solutions Lab, BangaloreShrikant RaoNo ratings yet
- Calibration Using GaDocument6 pagesCalibration Using GaDinesh KumarNo ratings yet
- InTech-Tracking A Moving Target From A Moving Camera With Rotation Compensated ImageryDocument15 pagesInTech-Tracking A Moving Target From A Moving Camera With Rotation Compensated ImageryedwardsilvaNo ratings yet
- Dmiot School of Computing Software Engineering Academic ProgramDocument13 pagesDmiot School of Computing Software Engineering Academic ProgrammazengiyaNo ratings yet
- Camera Calibration Technique Using Tsai'S Algorithm: Vol. 1 Issue 2 January 2011Document9 pagesCamera Calibration Technique Using Tsai'S Algorithm: Vol. 1 Issue 2 January 2011admin2146No ratings yet
- Palm Vein Verification Using SIFT Keypoint MatchingDocument10 pagesPalm Vein Verification Using SIFT Keypoint MatchingGautham ShettyNo ratings yet
- Establish Relationship Between Image and Object SpacesDocument21 pagesEstablish Relationship Between Image and Object SpacesramkumaracharyuluNo ratings yet
- To Computer Vision: Ahmed Eslam Mohammed Solyman (M.D.)Document29 pagesTo Computer Vision: Ahmed Eslam Mohammed Solyman (M.D.)charan213No ratings yet
- CV NotesDocument11 pagesCV NotesN.RAMAKUMARNo ratings yet
- 2012 FCV UchiyamaDocument8 pages2012 FCV UchiyamaAnonymous JSHUTpNo ratings yet
- Gaschler 2011 BDocument6 pagesGaschler 2011 BCoke LatNo ratings yet
- Camera Calibration Using Three Sets of Parallel Lines Echigo1990Document9 pagesCamera Calibration Using Three Sets of Parallel Lines Echigo1990Rajul RahmadNo ratings yet
- Module 11 VIDEO INDEXING AND RETRIEVAL Basics of content based image retrievalDocument7 pagesModule 11 VIDEO INDEXING AND RETRIEVAL Basics of content based image retrievalFranso ThomasNo ratings yet
- 5.methodology: 5.1 Installing The Tools and LibrariesDocument3 pages5.methodology: 5.1 Installing The Tools and Librariesnikil chinnaNo ratings yet
- DEPTH MAPstereo-Pair VideoDocument7 pagesDEPTH MAPstereo-Pair VideoNk OsujiNo ratings yet
- Zhang 2002Document14 pagesZhang 2002Liem NguyenNo ratings yet
- CG-Lect 1 - Output PrimitivesDocument18 pagesCG-Lect 1 - Output PrimitivesrahulNo ratings yet
- Day 3 - Single Image OrientationDocument22 pagesDay 3 - Single Image OrientationAarthi shreeNo ratings yet
- Experiments in 3D Measurements by Using Single Camera and Accurate MotionDocument6 pagesExperiments in 3D Measurements by Using Single Camera and Accurate MotionĐường Khánh SơnNo ratings yet
- Visible Surface Detection and Computer Animation ClassificationDocument4 pagesVisible Surface Detection and Computer Animation ClassificationprincejiNo ratings yet
- AnimationDocument9 pagesAnimationAruna AruchamiNo ratings yet
- 2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsDocument7 pages2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsMotasim MustafaNo ratings yet
- Robotic Pool: An Experiment Automatic Potting: Johan Roth3, of Computing, 3dept. of ofDocument6 pagesRobotic Pool: An Experiment Automatic Potting: Johan Roth3, of Computing, 3dept. of ofVansala GanesanNo ratings yet
- Image Registration: Gonzalez R. C., Woods R. E., Eddins S. L., Digital ImageDocument44 pagesImage Registration: Gonzalez R. C., Woods R. E., Eddins S. L., Digital Imagezain javaidNo ratings yet
- Camera Calibration ZhengDocument42 pagesCamera Calibration Zhengmaqsoodalam20063068No ratings yet
- Rob2 10 Camera CalibrationDocument42 pagesRob2 10 Camera CalibrationDuy Nguyễn Văn NhậtNo ratings yet
- Resolution Independent Curve Rendering Using Programmable Graphics HardwareDocument10 pagesResolution Independent Curve Rendering Using Programmable Graphics HardwarearanhilNo ratings yet
- Mapping Image to Real World CoordinatesDocument21 pagesMapping Image to Real World CoordinatesMuhammad AnsarNo ratings yet
- Statistical Description of Images - KLDocument8 pagesStatistical Description of Images - KLChung-yi LinNo ratings yet
- J.N.T.U College of Engineering: KakinadaDocument6 pagesJ.N.T.U College of Engineering: Kakinadanani123789No ratings yet
- Position Recovery From Accelerometric SensorsDocument50 pagesPosition Recovery From Accelerometric SensorsMarkusMayer100% (1)
- InTech-High Speed Architecure Based On Fpga For A Stereo Vision AlgorithmDocument18 pagesInTech-High Speed Architecure Based On Fpga For A Stereo Vision AlgorithmdvtruongsonNo ratings yet
- An Evaluation of Camera Calibration MethDocument7 pagesAn Evaluation of Camera Calibration Methximena zeballosNo ratings yet
- Motion of An Uncalibrated Stereo Rig Self-Calibration and Metric ReconstructionDocument11 pagesMotion of An Uncalibrated Stereo Rig Self-Calibration and Metric ReconstructionfmannanNo ratings yet
- Ivs2006 2Document8 pagesIvs2006 2Ricardo RomeroNo ratings yet
- Lecture 2Document67 pagesLecture 2Thura Htet AungNo ratings yet
- Shao Xiong2015Document5 pagesShao Xiong2015Thông VõNo ratings yet
- A Tracking Technology of Feature Point's Fuzzy Clustering Algorithm Based On Image StabilizationDocument8 pagesA Tracking Technology of Feature Point's Fuzzy Clustering Algorithm Based On Image StabilizationswoneraNo ratings yet
- Computer Graphics VTUDocument50 pagesComputer Graphics VTUManju VinoNo ratings yet
- Image Processing and Pattern Recoginition Lab ManualDocument38 pagesImage Processing and Pattern Recoginition Lab ManualDeepa SNo ratings yet
- Sampling and AliasingDocument39 pagesSampling and AliasingDeepa SNo ratings yet
- 2 1geometryDocument42 pages2 1geometryDeepa SNo ratings yet
- CS6670: Computer Vision: Noah SnavelyDocument40 pagesCS6670: Computer Vision: Noah SnavelyDeepa SNo ratings yet
- 3D TransformationDocument22 pages3D TransformationDeepa SNo ratings yet
- CS6670: Computer Vision: Noah SnavelyDocument40 pagesCS6670: Computer Vision: Noah SnavelyDeepa SNo ratings yet
- HistoGram EqualizationDocument55 pagesHistoGram EqualizationDeepa SNo ratings yet
- 3d To 2d ProjectionDocument20 pages3d To 2d ProjectionDeepa S100% (1)
- 2D TransformationDocument16 pages2D TransformationDeepa SNo ratings yet
- Histogram Equalization ExampleDocument3 pagesHistogram Equalization Examplechintanshah710No ratings yet
- Double and Triple Integration in Polar CoordinatesDocument25 pagesDouble and Triple Integration in Polar CoordinatesLol KekNo ratings yet
- GoodDocument26 pagesGoodaditya bhandakkarNo ratings yet
- HW Assignment #4Document5 pagesHW Assignment #4KensleyTsangNo ratings yet
- Boundary-Aware 3D Building Reconstruction From A Single Overhead ImageDocument11 pagesBoundary-Aware 3D Building Reconstruction From A Single Overhead ImageJan KristantoNo ratings yet
- Geophone and AkselerometerDocument173 pagesGeophone and AkselerometerNajib Arangi PanjahNo ratings yet
- Difference Between Big-O and Little-O Notations - Baeldung On Computer ScienceDocument5 pagesDifference Between Big-O and Little-O Notations - Baeldung On Computer ScienceKraft DinnerNo ratings yet
- A Das Gupta MCQ PDFDocument72 pagesA Das Gupta MCQ PDFBhavya ChawatNo ratings yet
- FPP Week 1 2 Lecture SlidesDocument84 pagesFPP Week 1 2 Lecture SlidesestifNo ratings yet
- AQA GCSE Maths 8300: Topics and Resources Foundation Tier NumberDocument3 pagesAQA GCSE Maths 8300: Topics and Resources Foundation Tier Numberharry curyNo ratings yet
- 403 S. H. S. C. E. Physics Objective and Essay TestsDocument11 pages403 S. H. S. C. E. Physics Objective and Essay TestsAyomide sayo-AdeyemiNo ratings yet
- Chapter IIIDocument5 pagesChapter IIIFrelen Joy SaldeNo ratings yet
- Rotational Motion MCQsDocument23 pagesRotational Motion MCQsDeepanshu LullaNo ratings yet
- Formal Methods: Finite State Machine - Regular ExpressionsDocument14 pagesFormal Methods: Finite State Machine - Regular ExpressionsStatus LifeNo ratings yet
- Os Lab Exno 1 To 5Document38 pagesOs Lab Exno 1 To 5Vairavel ChenniyappanNo ratings yet
- Lesson Plan in Mathematics 3 Quarter 1Document5 pagesLesson Plan in Mathematics 3 Quarter 1DoromalXD SorbitoNo ratings yet
- Measure Angles With Protractors & Sine BarsDocument12 pagesMeasure Angles With Protractors & Sine BarsDollar DaikNo ratings yet
- Behaviour of P, Pi & Pid Controller From Matlab SimulinkDocument30 pagesBehaviour of P, Pi & Pid Controller From Matlab SimulinkDineshNo ratings yet
- UT Dallas Syllabus For Ed4344.501.10s Taught by Ingrid Huisman (Ibh013000)Document5 pagesUT Dallas Syllabus For Ed4344.501.10s Taught by Ingrid Huisman (Ibh013000)UT Dallas Provost's Technology GroupNo ratings yet
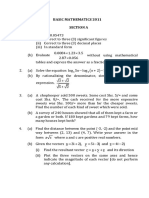
- Basic Mathematics 2011-QNDocument5 pagesBasic Mathematics 2011-QNEmanuel John BangoNo ratings yet
- Cad Cheat SheetDocument1 pageCad Cheat Sheetjpdbautista2921No ratings yet
- CHAPTER 5 SemiconductorsDocument42 pagesCHAPTER 5 Semiconductors1553No ratings yet
- UntitledDocument11 pagesUntitledapi-197704391No ratings yet
- Upload Listings ExcelDocument18 pagesUpload Listings Excelrajiv6810% (1)
- Radar Systems - Delay Line CancellersDocument7 pagesRadar Systems - Delay Line Cancellersgajjala rakeshNo ratings yet