You might also like
- Classifying Spaces for Surgery and Corbordism of Manifolds. (AM-92), Volume 92From EverandClassifying Spaces for Surgery and Corbordism of Manifolds. (AM-92), Volume 92No ratings yet
- Regulation and Control Engineering: 2.4.1. Block Diagram Reduction TechniquesDocument24 pagesRegulation and Control Engineering: 2.4.1. Block Diagram Reduction Techniquestilahun modammedNo ratings yet
- CH 3 2Document27 pagesCH 3 2Magarsaa Qana'iiNo ratings yet
- Control Block Diagram Transfer FunctionsDocument27 pagesControl Block Diagram Transfer FunctionsReagan TorbiNo ratings yet
- Control Principles Block Diagram Reduction: Chemical Engg 7 Semester Process Control & InstrumentationDocument27 pagesControl Principles Block Diagram Reduction: Chemical Engg 7 Semester Process Control & Instrumentationzahid ullahNo ratings yet
- Chapter3 - Block Diagram - Reduction - 01-1Document27 pagesChapter3 - Block Diagram - Reduction - 01-1bayu laksanaNo ratings yet
- Block Diagram: Dr. Issam ELGMATIDocument32 pagesBlock Diagram: Dr. Issam ELGMATI7moud alajlaniNo ratings yet
- Control System Engineering: Topic Block Diagram ExamplesDocument42 pagesControl System Engineering: Topic Block Diagram ExamplesjpatrNo ratings yet
- Block Diagram Transfer Function ExamplesDocument42 pagesBlock Diagram Transfer Function ExamplesMostafa Abdelalim0% (1)
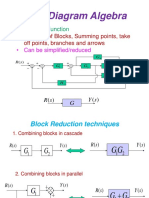
- Block Diagram AlgebraDocument27 pagesBlock Diagram Algebraearnest normanNo ratings yet
- Control fan speed with feedbackDocument30 pagesControl fan speed with feedbackSam potterNo ratings yet
- System Engineering Block Diagram ReductionDocument38 pagesSystem Engineering Block Diagram ReductionNoha IbrahimNo ratings yet
- Block Diagram Reduction Rules PDFDocument18 pagesBlock Diagram Reduction Rules PDFsvijiNo ratings yet
- 351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram ReductionDocument70 pages351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram Reductionmishal shakeelNo ratings yet
- Block Diagram Algebra: Modeling Systems GraphicallyDocument28 pagesBlock Diagram Algebra: Modeling Systems GraphicallySirshenduNo ratings yet
- Reduction of Complicated Block DiagramsDocument45 pagesReduction of Complicated Block Diagramstilahun modammedNo ratings yet
- Control System Engineering: Topic Block Diagram RepresentationDocument24 pagesControl System Engineering: Topic Block Diagram RepresentationWaqas AfzalNo ratings yet
- Concept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyDocument23 pagesConcept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyHiral HiraniNo ratings yet
- Block Diagram Reduction TechniquesDocument27 pagesBlock Diagram Reduction TechniquessreenathreddyNo ratings yet
- Lecture 2 Block Diagram Representation of Control SystemsDocument57 pagesLecture 2 Block Diagram Representation of Control SystemsAmeer FauwazNo ratings yet
- Control Chapter 2 - Lecture 2Document28 pagesControl Chapter 2 - Lecture 23re0oooNo ratings yet
- FeedbackDocument39 pagesFeedbackhazem ab2009No ratings yet
- SA2019-20 CHAPTER 1 Block DiagramDocument23 pagesSA2019-20 CHAPTER 1 Block DiagramMohamad Firdaus Ismal Hafis bin Mohd MokhtarNo ratings yet
- Block Diagram and SFG - Practice Sheet 01 (By Diptanshu Sir)Document11 pagesBlock Diagram and SFG - Practice Sheet 01 (By Diptanshu Sir)Dewashish KarmiyalNo ratings yet
- Control Engineering NPTEL Online Course SummaryDocument12 pagesControl Engineering NPTEL Online Course SummaryAkhil Nameirakpam100% (1)
- M8 - Ch-5 - Reduction of Multiple Subsystems-Part-1 (D)Document45 pagesM8 - Ch-5 - Reduction of Multiple Subsystems-Part-1 (D)Shuvro Sankar SenNo ratings yet
- Block Diagram Simplification TechniquesDocument26 pagesBlock Diagram Simplification Techniquesmamnd tahaNo ratings yet
- BLK and SFG PDFDocument48 pagesBLK and SFG PDFyeabsira gashawNo ratings yet
- Tutorial 3Document2 pagesTutorial 3sanjaysr2226No ratings yet
- Lec04: Objectives: Unit 2 Control SystemDocument6 pagesLec04: Objectives: Unit 2 Control SystemJosena SSNo ratings yet
- Lecture 5 Block Diagram Representation of Control Systems PDFDocument60 pagesLecture 5 Block Diagram Representation of Control Systems PDFNicole Anne BorromeoNo ratings yet
- Gravity Dams Fluids 1 PDFDocument27 pagesGravity Dams Fluids 1 PDFChristian DayritNo ratings yet
- G Codes: 3.1. Rapid Velocity RateDocument52 pagesG Codes: 3.1. Rapid Velocity RatedunhaNo ratings yet
- Linear Control SystemsDocument76 pagesLinear Control SystemsKamran TariqNo ratings yet
- Teoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxDocument14 pagesTeoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxdaniela martinezNo ratings yet
- Lathe Programming ManualEN V77Document148 pagesLathe Programming ManualEN V77sunhuynhNo ratings yet
- Block Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6Document5 pagesBlock Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6علي حسين علاوي ثوينيNo ratings yet
- Graph Theory Operations and ConceptsDocument5 pagesGraph Theory Operations and ConceptsPranjal Das100% (1)
- Lathe Machine Program Manual (C Type)Document259 pagesLathe Machine Program Manual (C Type)ダンハイソンNo ratings yet
- Block Diagram ReductionDocument3 pagesBlock Diagram ReductionAbhilash MohanNo ratings yet
- Control Systems - DIV B - Tutorial 1Document3 pagesControl Systems - DIV B - Tutorial 1Avadh VadhiyaNo ratings yet
- Block Diagram Representation of Control SystemsDocument53 pagesBlock Diagram Representation of Control SystemsRaihanNo ratings yet
- TUGAS BAB 7 Pengendalian ProsesDocument5 pagesTUGAS BAB 7 Pengendalian ProsesTegarRochmad OddyPramantoNo ratings yet
- Lecture - 2 Block Signal FlowDocument77 pagesLecture - 2 Block Signal Flowkibwe anthoNo ratings yet
- Lecture 5 (Block Diagram Representation & Reduction)Document51 pagesLecture 5 (Block Diagram Representation & Reduction)muhammad hamzaNo ratings yet
- VT-1150 Operation ManualDocument76 pagesVT-1150 Operation ManualAnne RodriguesNo ratings yet
- Topic06 ReviewedDocument4 pagesTopic06 Reviewedsuper junlinNo ratings yet
- Block Diagram - TF - Steady State ErrorsDocument93 pagesBlock Diagram - TF - Steady State ErrorsTarek A-RNo ratings yet
- G CODE CHART FOR LATHESDocument2 pagesG CODE CHART FOR LATHESAleksander VargaNo ratings yet
- Digital Logic Design: Abdulhadi ShoufanDocument12 pagesDigital Logic Design: Abdulhadi ShoufanMohammed ismail2010No ratings yet
- FANUC 0M-A Interpolation and Canned CyclesDocument3 pagesFANUC 0M-A Interpolation and Canned CyclesSanchai ProgaeewNo ratings yet
- EE4262: Digital and Non-Linear Control: Block DiagramsDocument53 pagesEE4262: Digital and Non-Linear Control: Block Diagramsyessa gamuedaNo ratings yet
- Updated Chapter 2 Control Systems Lecture NotesDocument22 pagesUpdated Chapter 2 Control Systems Lecture Notesvijay rajNo ratings yet
- Coding G PartDocument2 pagesCoding G PartGertschNo ratings yet
- Jadual Kalah Mati Dam AjiDocument9 pagesJadual Kalah Mati Dam AjisaqifahrazakNo ratings yet
- Block Diagram Reduction: Submitted By: Mrs. Ramandeep Kaur Assot. Professor-EeeDocument26 pagesBlock Diagram Reduction: Submitted By: Mrs. Ramandeep Kaur Assot. Professor-EeeSeverina MallariNo ratings yet
- Control Reduction - Examples - Lecture 3Document56 pagesControl Reduction - Examples - Lecture 33re0oooNo ratings yet
- Feedback Control Systems (FCS)Document56 pagesFeedback Control Systems (FCS)noraNo ratings yet
- Call Center Management System Software Requirement Specification v0.01Document26 pagesCall Center Management System Software Requirement Specification v0.01Mousumi BorahNo ratings yet
- Fichas TecnicasDocument34 pagesFichas TecnicasjorgealfonsoortizcNo ratings yet
- Lab2 - Data Manipulation Language (DML) CommandsDocument5 pagesLab2 - Data Manipulation Language (DML) CommandsAnie Fred BayagNo ratings yet
- ROS2 Basics in 5 DaysDocument9 pagesROS2 Basics in 5 DaysJosep Rueda CollellNo ratings yet
- Visit Braindump2go and Download Full Version AZ-204 Exam DumpsDocument8 pagesVisit Braindump2go and Download Full Version AZ-204 Exam DumpsAndre AyalaNo ratings yet
- Small Animation Using Applet (JAVA)Document13 pagesSmall Animation Using Applet (JAVA)shaikhnumn22No ratings yet
- Skybox ChangeManager UsersGuide V10!0!300Document79 pagesSkybox ChangeManager UsersGuide V10!0!300pisanij123No ratings yet
- This Is Only A Sample Paper Meant To Be Indicative of The Type of Questions That Will Be AskedDocument22 pagesThis Is Only A Sample Paper Meant To Be Indicative of The Type of Questions That Will Be AskedJharkhandNo ratings yet
- Self-Evaluation S: ChecklistDocument5 pagesSelf-Evaluation S: ChecklistNitin balayanNo ratings yet
- Name Inputbox ("Whats Your Name?") Msgbox ("Have A Good Day, ") + NameDocument1 pageName Inputbox ("Whats Your Name?") Msgbox ("Have A Good Day, ") + NameHimura KenshinNo ratings yet
- Lab 4 CPU InstructionsDocument16 pagesLab 4 CPU InstructionsPatricia KC0% (1)
- 1505901416lect 36 F (1Document6 pages1505901416lect 36 F (1Vishal TalekarNo ratings yet
- NMTC Screening Test Online InstructionsDocument2 pagesNMTC Screening Test Online Instructionsankit satpatiNo ratings yet
- DM600 - TranSend II Installation GuideDocument12 pagesDM600 - TranSend II Installation GuideSergio BuenoNo ratings yet
- Data Structures LightHall ClassDocument43 pagesData Structures LightHall ClassIwuchukwu ChiomaNo ratings yet
- Malicious Url Detection Based On Machine LearningDocument52 pagesMalicious Url Detection Based On Machine Learningkruthi reddyNo ratings yet
- CCNA 1 v7 de 14 16Document26 pagesCCNA 1 v7 de 14 16Riadh SalhiNo ratings yet
- Hands-On Ethical Hacking and Network Defense 1st Edition Simpson Test Bank DownloadDocument8 pagesHands-On Ethical Hacking and Network Defense 1st Edition Simpson Test Bank DownloadAdam West100% (17)
- IoT Communication ModelsDocument6 pagesIoT Communication ModelsSARFRAZNo ratings yet
- IOT Based Agriculture Monitoring SystemDocument16 pagesIOT Based Agriculture Monitoring SystemMuhammad UmairNo ratings yet
- Alcatel Omnipcx EnterpriseDocument30 pagesAlcatel Omnipcx EnterpriseAriel BecerraNo ratings yet
- Office 365 Vs G Suite Comparison TableDocument2 pagesOffice 365 Vs G Suite Comparison TableFaisal SharifNo ratings yet
- Script Computational PhysicsDocument150 pagesScript Computational PhysicsAntonioNo ratings yet
- Unit 13 - Week 11: Assignment 11Document10 pagesUnit 13 - Week 11: Assignment 11Shivam GargNo ratings yet
- ArcGis Pro Parcel FabricDocument4 pagesArcGis Pro Parcel Fabricchaitu592100% (1)
- Week 005-006 - Module ArraysDocument5 pagesWeek 005-006 - Module ArraysAnne Marie SanchezNo ratings yet
- DevOps Pipeline with Docker TemplateDocument79 pagesDevOps Pipeline with Docker Templatenaviat204No ratings yet
- Notes & Password Manager: ObjectiveDocument9 pagesNotes & Password Manager: ObjectiveJai RamtekeNo ratings yet
- Question BankDocument11 pagesQuestion Bankjain100% (2)
- Review Article: Network Attacks Detection Methods Based On Deep Learning Techniques: A SurveyDocument17 pagesReview Article: Network Attacks Detection Methods Based On Deep Learning Techniques: A SurveyjavaNo ratings yet