You might also like
- How To Make A Robot WalkDocument15 pagesHow To Make A Robot Walkadmer100% (1)
- Respiratory Protection RequirementsDocument35 pagesRespiratory Protection RequirementsNehemiah Cervantes100% (3)
- Oxford Classical Dictionary AbbreviationsDocument9 pagesOxford Classical Dictionary AbbreviationsScotch_Nights_Order0% (2)
- 2014 Book Bio-inspiredComputationInUnman PDFDocument284 pages2014 Book Bio-inspiredComputationInUnman PDFcesarNo ratings yet
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentFrom EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNo ratings yet
- Process Safety Management System-PaperDocument11 pagesProcess Safety Management System-PaperV. Balasubramaniam100% (2)
- Distributed consensus algorithm for swarming UAV inspectionDocument23 pagesDistributed consensus algorithm for swarming UAV inspectionbegziew getnetNo ratings yet
- Burnelli AircraftDocument51 pagesBurnelli Aircraftretread1100% (3)
- Addis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer EngineeringDocument22 pagesAddis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer Engineeringbegziew getnetNo ratings yet
- Ant Colony OptimizationDocument34 pagesAnt Colony OptimizationSwayamsiddha Mohapatra100% (1)
- Autonomous Robot 5Document5 pagesAutonomous Robot 5Keith KnightNo ratings yet
- Pick & Place Robot Arm ControlDocument14 pagesPick & Place Robot Arm ControlAkshay byp100% (1)
- MasterthesisDocument57 pagesMasterthesisMohamad SlimNo ratings yet
- Swarm Robots ReportDocument19 pagesSwarm Robots ReportAakritiNo ratings yet
- Swarm RoboticsDocument11 pagesSwarm RoboticsMarcusNo ratings yet
- Consciousness For Robot Controller AutonDocument7 pagesConsciousness For Robot Controller Autondali ramsNo ratings yet
- Energy-Efficient Swarm Behavior For Indoor UAV AdDocument15 pagesEnergy-Efficient Swarm Behavior For Indoor UAV AdzarrarhaiderabulkhairiNo ratings yet
- An Approach of Ir-Based Short-Range Correspondence Systems For Swarm Robot Balanced Requisitions and CommunicationsDocument10 pagesAn Approach of Ir-Based Short-Range Correspondence Systems For Swarm Robot Balanced Requisitions and CommunicationsAdam HansenNo ratings yet
- Collision Avoidance in Multi-Robot Systems: Chengtao Cai and Chunsheng Yang Qidan Zhu and Yanhua LiangDocument6 pagesCollision Avoidance in Multi-Robot Systems: Chengtao Cai and Chunsheng Yang Qidan Zhu and Yanhua Liangshyam SaravananNo ratings yet
- Sols Papers MicrorobotDocument10 pagesSols Papers MicrorobotRAPRATSINNo ratings yet
- Swarm Robotics Design and ImplementationDocument9 pagesSwarm Robotics Design and ImplementationMUHAMMAD AMMARNo ratings yet
- Decentralized Control and Machine Learning Techniques For Effective Drone Swarm ControlDocument32 pagesDecentralized Control and Machine Learning Techniques For Effective Drone Swarm Controlavinash100909No ratings yet
- Mahipal SnakeDocument20 pagesMahipal SnakeGarvit BhattNo ratings yet
- "Autonomous Navigation of Mobile Robots From Basic Sensing To Problem Solving PDFDocument6 pages"Autonomous Navigation of Mobile Robots From Basic Sensing To Problem Solving PDFaliNo ratings yet
- A Review of Mobile Robots: Concepts, Methods, Theoretical Framework, and ApplicationsDocument22 pagesA Review of Mobile Robots: Concepts, Methods, Theoretical Framework, and Applicationsماجد الرويليNo ratings yet
- Josh ReportDocument29 pagesJosh ReportJ.CNo ratings yet
- How to Make a Walking Robot Using a MicroCore CircuitDocument8 pagesHow to Make a Walking Robot Using a MicroCore Circuitstraf238No ratings yet
- AntHocNet: An Adaptive Nature-Inspired Routing Algorithm for Mobile Ad Hoc NetworksDocument19 pagesAntHocNet: An Adaptive Nature-Inspired Routing Algorithm for Mobile Ad Hoc NetworksMohana UthandiNo ratings yet
- Turtlebot 2 Autonomous Navigation Under The Virtual World GazeboDocument7 pagesTurtlebot 2 Autonomous Navigation Under The Virtual World Gazebosuraj aryaNo ratings yet
- 3.toward A Mobile AutonomousDocument8 pages3.toward A Mobile AutonomoussandeeppothugantiNo ratings yet
- Cooperative Control of Distributed Multi-Agent SystemsDocument27 pagesCooperative Control of Distributed Multi-Agent Systemsjunaidtps1No ratings yet
- Robotics: Deep Reinforcement Learning For The Control of Robotic Manipulation: A Focussed Mini-ReviewDocument13 pagesRobotics: Deep Reinforcement Learning For The Control of Robotic Manipulation: A Focussed Mini-ReviewHien Bui XuanNo ratings yet
- An Approach To Rough Terrain Autonomous MobilityDocument34 pagesAn Approach To Rough Terrain Autonomous MobilityAaronNo ratings yet
- Deployment of Mobile Robots With Energy and Timing ConstraintsDocument16 pagesDeployment of Mobile Robots With Energy and Timing ConstraintsPAYEL MIDYANo ratings yet
- Effective Path Planning of A Multi Robot System Using A Hovering EyeDocument2 pagesEffective Path Planning of A Multi Robot System Using A Hovering EyeerpublicationNo ratings yet
- A Review of Research in Multi-Robot SystemsDocument6 pagesA Review of Research in Multi-Robot Systemshuangyuanshui0% (1)
- Reflections On The Future of Swarm Robotics: FocusDocument4 pagesReflections On The Future of Swarm Robotics: FocusMuhammad Muzamal ShahzadNo ratings yet
- RAFADocument24 pagesRAFAAnurag SathianNo ratings yet
- Robotics 12 00122Document22 pagesRobotics 12 00122Josep Rueda CollellNo ratings yet
- CLAYTRONICS: Programmable Matter Concept Combines Nanorobotics and ComputingDocument8 pagesCLAYTRONICS: Programmable Matter Concept Combines Nanorobotics and ComputingNeeraj GuptaNo ratings yet
- Objective & Outcome of RoboticsDocument3 pagesObjective & Outcome of RoboticsMechanicalNo ratings yet
- Reactive Navigation for Autonomous Guided Vehicles Using Neuro-fuzzy TechniquesDocument10 pagesReactive Navigation for Autonomous Guided Vehicles Using Neuro-fuzzy TechniquesMiguel SilvaNo ratings yet
- Swarm Robot System For Underwater Communication NetworkDocument8 pagesSwarm Robot System For Underwater Communication Network283472 ktr.phd.ece.19No ratings yet
- RAAICON Swarm Robotics 2021 Conference Paper - Ishraq HasanDocument5 pagesRAAICON Swarm Robotics 2021 Conference Paper - Ishraq HasanIshraq HasanNo ratings yet
- Mobile Robotics: Research, Applications and Challenges PDFDocument4 pagesMobile Robotics: Research, Applications and Challenges PDFdrugoksNo ratings yet
- Robotics Harik - 2018Document20 pagesRobotics Harik - 2018Vänhëë ËscöbärNo ratings yet
- A Behavior-Based Architecture For Unmanned Aerial: VehiclesDocument7 pagesA Behavior-Based Architecture For Unmanned Aerial: VehiclesJoao PedroNo ratings yet
- 3 Degree of Freedom Robotic Arm for PickupDocument14 pages3 Degree of Freedom Robotic Arm for Pickuprishikesh badveNo ratings yet
- Care2013 Submission 58Document6 pagesCare2013 Submission 58鄭志英No ratings yet
- RT - Mod 1Document64 pagesRT - Mod 1Muhammed Razi MNo ratings yet
- Sensor-Based Navigation of A Mobile Robot in An Indoor EnvironmentDocument18 pagesSensor-Based Navigation of A Mobile Robot in An Indoor EnvironmentGanesh Kumar ArumugamNo ratings yet
- 2_4417_Kara_L_skDocument10 pages2_4417_Kara_L_skfaith_khp73301No ratings yet
- Sensor Based Motion Control of Mobile Car RobotDocument5 pagesSensor Based Motion Control of Mobile Car RobotEditor IJTSRDNo ratings yet
- Advanced Control Methods in Marine Robotics ApplicationsDocument2 pagesAdvanced Control Methods in Marine Robotics ApplicationsTony K PaulNo ratings yet
- Mobile Robot Architectures EvaluationDocument17 pagesMobile Robot Architectures EvaluationShujat AliNo ratings yet
- Aunonmous Vehicle Control Systems - A Review of Decision Making PDFDocument42 pagesAunonmous Vehicle Control Systems - A Review of Decision Making PDFRodrigo AndrésNo ratings yet
- Design and Fabrication of Low Cost Vccum Cleaner ProjectDocument19 pagesDesign and Fabrication of Low Cost Vccum Cleaner ProjectKARTHICK MNo ratings yet
- Heterogeneous Robot Networks for Search and RescueDocument6 pagesHeterogeneous Robot Networks for Search and RescueCristhian Adalberto Carrillo moraNo ratings yet
- Broadcast Control Mechanism For Positional Consensus in Multiagent SystemsDocument20 pagesBroadcast Control Mechanism For Positional Consensus in Multiagent SystemsSarathNo ratings yet
- Thesis AbstractDocument7 pagesThesis Abstractmahdi_kb1No ratings yet
- Navigation of Autonomous Robotic Vehicles Using Fuzzy LogicDocument6 pagesNavigation of Autonomous Robotic Vehicles Using Fuzzy LogicNurhijjah Juliana RambeNo ratings yet
- 基于知识的卫星装配Document10 pages基于知识的卫星装配qweasdkawayiNo ratings yet
- Swarm Robotics PDFDocument19 pagesSwarm Robotics PDFAnurag SathianNo ratings yet
- Analie T. Caro: Personal ParticularsDocument4 pagesAnalie T. Caro: Personal ParticularsAnalie Tañamor CaroNo ratings yet
- Tentech MTD20KWe Digital Earth Tester Users Guide ManualDocument45 pagesTentech MTD20KWe Digital Earth Tester Users Guide ManualAnonymous voVeDickM100% (1)
- Complete Notes On 9th Physics by Asif RasheedDocument82 pagesComplete Notes On 9th Physics by Asif RasheedAsif Rasheed Rajput75% (28)
- Lecture 4 - Animated Data VisualizationDocument35 pagesLecture 4 - Animated Data VisualizationAnurag LaddhaNo ratings yet
- American Cows in Antarctica R. ByrdDocument28 pagesAmerican Cows in Antarctica R. ByrdBlaze CNo ratings yet
- CS/CS/SB 1550: Prescription DrugsDocument49 pagesCS/CS/SB 1550: Prescription DrugsBrandon HoganNo ratings yet
- Assessment of Blast Furnace Behaviour Through Softening-Melting TestDocument10 pagesAssessment of Blast Furnace Behaviour Through Softening-Melting TestvidhyasagarNo ratings yet
- English AssignmentDocument79 pagesEnglish AssignmentAnime TubeNo ratings yet
- Eight Lane Vadodara Kim ExpresswayDocument11 pagesEight Lane Vadodara Kim ExpresswayUmesh SutharNo ratings yet
- The Most Efficient and Effective Ways To Address New Literacies FDocument61 pagesThe Most Efficient and Effective Ways To Address New Literacies FAlpha MoontonNo ratings yet
- Math 124 Final Examination Winter 2011: !!! READ... INSTRUCTIONS... READ !!!Document12 pagesMath 124 Final Examination Winter 2011: !!! READ... INSTRUCTIONS... READ !!!jelenicasabancicaNo ratings yet
- Introduction To AIX Mirror Pools 201009Document11 pagesIntroduction To AIX Mirror Pools 201009Marcus BennettNo ratings yet
- PDFDocument478 pagesPDFPriyaranjan PradhanNo ratings yet
- Research Day AbstractsDocument287 pagesResearch Day AbstractsStoriesofsuperheroesNo ratings yet
- Rethinking Classroom Assessment With Purpose in MindDocument112 pagesRethinking Classroom Assessment With Purpose in MindlykkhaiNo ratings yet
- ECN 202 Final AssignmentDocument10 pagesECN 202 Final AssignmentFarhan Eshraq JeshanNo ratings yet
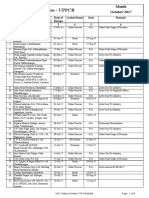
- NOC Status for UPPCB in October 2017Document6 pagesNOC Status for UPPCB in October 2017Jeevan jyoti vnsNo ratings yet
- Coding and Decoding Practice TestDocument13 pagesCoding and Decoding Practice TestRaja SubramanianNo ratings yet
- Postgraduate Prospectus 2021: World ChangersDocument35 pagesPostgraduate Prospectus 2021: World ChangersSKNo ratings yet
- What does high frequency mean for TIG weldingDocument14 pagesWhat does high frequency mean for TIG weldingUmaibalanNo ratings yet
- Research Methodology: by Asaye Gebrewold (PHD Candidate)Document17 pagesResearch Methodology: by Asaye Gebrewold (PHD Candidate)natnael haileNo ratings yet
- PDMS JauharManualDocument13 pagesPDMS JauharManualarifhisam100% (2)
- Al-Qawlul Mufeed: Backbiting and Its Impact On SocietyDocument2 pagesAl-Qawlul Mufeed: Backbiting and Its Impact On SocietyMountainofknowledgeNo ratings yet
- CPG Prevention, Diagnosis & Management of IE PDFDocument182 pagesCPG Prevention, Diagnosis & Management of IE PDFsigitNo ratings yet
- Three Phase Traffic Theory PDFDocument11 pagesThree Phase Traffic Theory PDFKocic GradnjaNo ratings yet