You might also like
- Statics Problems & SolutionsDocument39 pagesStatics Problems & SolutionsYanli Baltero Cruz100% (1)
- Complex Eng Prob in CE PDFDocument6 pagesComplex Eng Prob in CE PDFMonirul IslamNo ratings yet
- Chapter 7 PDFDocument67 pagesChapter 7 PDFNathalhyn ArmijoNo ratings yet
- C9789810694364SM PDFDocument34 pagesC9789810694364SM PDFJohnrey FlandezNo ratings yet
- Vector Mechanics For Engineers: Dynamics Chapter 13 NotesDocument88 pagesVector Mechanics For Engineers: Dynamics Chapter 13 Notesrvssnake0% (1)
- HW4 Solutions PDFDocument11 pagesHW4 Solutions PDFMohamed KanzoutNo ratings yet
- Plate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityDocument4 pagesPlate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityRamil T. TrinidadNo ratings yet
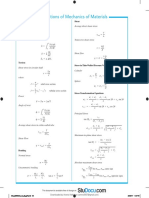
- Mechanics of Materials Equation SheetDocument3 pagesMechanics of Materials Equation SheetAramis Kelkelyan100% (1)
- Homework 1 3Document6 pagesHomework 1 3inisdeprawn100% (2)
- Engineering MECHANicsDocument2 pagesEngineering MECHANicsMTU imphal0% (1)
- Assignment 3 Kirchoffs LawsDocument2 pagesAssignment 3 Kirchoffs LawsSajan MaharjanNo ratings yet
- Vector Calculus 2018 (Civil Engineering)Document155 pagesVector Calculus 2018 (Civil Engineering)bhidara swnNo ratings yet
- Alciatore Mechatronics Solution Manual 5th EditionDocument16 pagesAlciatore Mechatronics Solution Manual 5th Editionsajal agarwalNo ratings yet
- Manpower LevelingDocument7 pagesManpower LevelingPrincess Claris ArauctoNo ratings yet
- 1.0 Introduction (CE-312) PDFDocument17 pages1.0 Introduction (CE-312) PDFHussain AbidNo ratings yet
- Chapter 3 Weight Volume RelationshipsDocument88 pagesChapter 3 Weight Volume RelationshipsJeannieMayDelfinNo ratings yet
- Problem Set No.1-MidtermDocument31 pagesProblem Set No.1-MidtermROYCE1983No ratings yet
- Statics of Rigid Bodies - Fundamental ConceptsDocument4 pagesStatics of Rigid Bodies - Fundamental ConceptsJan Alexis MonsaludNo ratings yet
- Chapter 03 Equilibrium - 2D ExerciseDocument21 pagesChapter 03 Equilibrium - 2D ExerciseHassam Balouch50% (2)
- Engg MechanicsDocument151 pagesEngg MechanicsMartin De Boras PragashNo ratings yet
- Ap1 Lab Phet Hookes LawDocument5 pagesAp1 Lab Phet Hookes LawDaniel AmmarNo ratings yet
- Statics of Rigid BodiesDocument2 pagesStatics of Rigid BodiesHazelNoreenSabileManalo100% (1)
- Statics and Dinamics NotesDocument126 pagesStatics and Dinamics NotesJosé Natal100% (1)
- Rectilinear Motion: Engr. John Dharyl R. de Leon, ReeDocument22 pagesRectilinear Motion: Engr. John Dharyl R. de Leon, ReeJamie MedallaNo ratings yet
- Chapter 8 Slope and Deflection Strength of Materials - Part 1Document14 pagesChapter 8 Slope and Deflection Strength of Materials - Part 1Abhijith ShettyNo ratings yet
- TapingDocument3 pagesTapingEdeza MatarumNo ratings yet
- BCE 311 Lecture 1Document77 pagesBCE 311 Lecture 1francessichNo ratings yet
- Engineering Mechanics Statics by Sharma, VikrantDocument293 pagesEngineering Mechanics Statics by Sharma, Vikrantmake hand100% (7)
- Project Construction Management: Data SheetDocument8 pagesProject Construction Management: Data SheetyfcbrandonNo ratings yet
- Field Exercise No. 4Document3 pagesField Exercise No. 4Bambi InjangNo ratings yet
- Previous Section: S B S BDocument11 pagesPrevious Section: S B S BLouies UngriaNo ratings yet
- Iiloop Tenslorr 7-To: Eda - Ro.GDocument11 pagesIiloop Tenslorr 7-To: Eda - Ro.GAchara100% (1)
- Basic Concepts of Differential and Integral CalculusDocument6 pagesBasic Concepts of Differential and Integral CalculusManoj KhandelwalNo ratings yet
- Differential Leveling: Reference: Elementary Surveying 3 Edition by Juny Pilapil La PuttDocument10 pagesDifferential Leveling: Reference: Elementary Surveying 3 Edition by Juny Pilapil La PuttKevinNo ratings yet
- Simple StressDocument43 pagesSimple StressKeith R SimblanteNo ratings yet
- Structural Analysis NotesDocument166 pagesStructural Analysis NotesdunyNo ratings yet
- Od & Parking StudiesDocument154 pagesOd & Parking StudiesMichael KpeglahNo ratings yet
- Engineering MechanicsDocument102 pagesEngineering MechanicsanilkumarNo ratings yet
- Virtual Work Method (Beams)Document20 pagesVirtual Work Method (Beams)Kenny CantilaNo ratings yet
- Moment of A ForceDocument14 pagesMoment of A ForceAli MemonNo ratings yet
- Tutor 4 Dependent MotionDocument4 pagesTutor 4 Dependent MotionEden HazardNo ratings yet
- Deflection of BeamDocument34 pagesDeflection of BeampurushothamanNo ratings yet
- Deflections of BeamDocument31 pagesDeflections of BeamDiego LoyolaNo ratings yet
- Kinematics of Particles (Ch1 Dynamics Chapter 11 Beer7)Document43 pagesKinematics of Particles (Ch1 Dynamics Chapter 11 Beer7)Er Shankar Singh Dhami100% (3)
- 09 Deflection-Virtual Work Method Beams and Frames-1Document38 pages09 Deflection-Virtual Work Method Beams and Frames-1MayMST50% (4)
- UNIT-1 Structural Analysis-1 220716Document96 pagesUNIT-1 Structural Analysis-1 220716Azrin YusopNo ratings yet
- Maths Study Material 2015 16 PDFDocument123 pagesMaths Study Material 2015 16 PDFAngel AnKu100% (1)
- Lagrange InterpolationDocument18 pagesLagrange InterpolationdiviyabhavaaniNo ratings yet
- Behaviour of Column and Struts ApparatusDocument4 pagesBehaviour of Column and Struts ApparatusSagar BothraNo ratings yet
- 1) Dynamics of Rigid BodiesDocument18 pages1) Dynamics of Rigid Bodiesnicolo agustinNo ratings yet
- Example2 LL, PL& HydrometerDocument14 pagesExample2 LL, PL& Hydrometertes100% (1)
- Friction, Incline, Pulley ProblemsDocument116 pagesFriction, Incline, Pulley ProblemsAlexander Roman Sich100% (1)
- Problem 8.1: SolutionDocument227 pagesProblem 8.1: SolutionPaul Reyna Rojas0% (1)
- Mechanics 1 Statics UMDDocument366 pagesMechanics 1 Statics UMDEbenezer ArunkumarNo ratings yet
- Syllabus Dynamics of Rigid Bodies PDFDocument19 pagesSyllabus Dynamics of Rigid Bodies PDFJackNo ratings yet
- Assignment 2 Series Parallel and Star Delta 1Document5 pagesAssignment 2 Series Parallel and Star Delta 1Sajan MaharjanNo ratings yet
- Lesson 5Document25 pagesLesson 5Angelica Rae MolinaNo ratings yet
- Forces in Equilibrium Equilibrium: IllustrationsDocument4 pagesForces in Equilibrium Equilibrium: IllustrationsAlberto Jr Lanuzo TaquiquiNo ratings yet
- 1 - Equilibrium of A ParticleDocument25 pages1 - Equilibrium of A Particlealnd azadNo ratings yet
- Intro To MechDocument12 pagesIntro To MechJChris EsguerraNo ratings yet
- Motor Insurance - Proposal Form Cum Transcript Letter For Miscellaneous Carrying ComprehensiveDocument2 pagesMotor Insurance - Proposal Form Cum Transcript Letter For Miscellaneous Carrying ComprehensiveSantosh JaiswalNo ratings yet
- Celebration of International Day For Street ChildrenDocument3 pagesCelebration of International Day For Street ChildrenGhanaWeb EditorialNo ratings yet
- Right To Social JusticeDocument13 pagesRight To Social Justicejooner45No ratings yet
- Atok-Big Wedge Assn. v. Atok-Big Wedge Co.,97 Phil, 294 '1995Document6 pagesAtok-Big Wedge Assn. v. Atok-Big Wedge Co.,97 Phil, 294 '1995Daniela Sandra AgootNo ratings yet
- Quiz 4Document49 pagesQuiz 4Jr CañeteNo ratings yet
- PCARD AssignmentDocument7 pagesPCARD AssignmentMellaniNo ratings yet
- SEPsim Installation Guide - V2.1Document12 pagesSEPsim Installation Guide - V2.1Shamini GnanasothyNo ratings yet
- Notice: Export Privileges, Actions Affecting: Teepad Electronic General TradingDocument4 pagesNotice: Export Privileges, Actions Affecting: Teepad Electronic General TradingJustia.comNo ratings yet
- Cash Flow StatementDocument11 pagesCash Flow StatementDuke CyraxNo ratings yet
- Bpats Enhancement Training ProgramDocument1 pageBpats Enhancement Training Programspms lugaitNo ratings yet
- Assertions About Classes of Transactions and Events For The Period Under AuditDocument1 pageAssertions About Classes of Transactions and Events For The Period Under AuditLyka CastroNo ratings yet
- lý thuyết cuối kì MNCDocument6 pageslý thuyết cuối kì MNCPhan Minh KhuêNo ratings yet
- 2017-18 Annual Report - California YMCA Youth & GovernmentDocument16 pages2017-18 Annual Report - California YMCA Youth & GovernmentRichard HsuNo ratings yet
- Background To The Arbitration and Conciliation Act, 1996Document2 pagesBackground To The Arbitration and Conciliation Act, 1996HimanshuNo ratings yet
- Create An Informational Flyer AssignmentDocument4 pagesCreate An Informational Flyer AssignmentALEEHA BUTTNo ratings yet
- AEC - 12 - Q1 - 0401 - SS2 Reinforcement - Investments, Interest Rate, and Rental Concerns of Filipino EntrepreneursDocument5 pagesAEC - 12 - Q1 - 0401 - SS2 Reinforcement - Investments, Interest Rate, and Rental Concerns of Filipino EntrepreneursVanessa Fampula FaigaoNo ratings yet
- SATIP-Q-001-04rev4 (Structural Precast-Prestressed Conc.) PDFDocument2 pagesSATIP-Q-001-04rev4 (Structural Precast-Prestressed Conc.) PDFRamziAhmedNo ratings yet
- Rickshaw IndividualismDocument5 pagesRickshaw Individualismoakster510No ratings yet
- United States v. Salvatore Salamone, 902 F.2d 237, 3rd Cir. (1990)Document6 pagesUnited States v. Salvatore Salamone, 902 F.2d 237, 3rd Cir. (1990)Scribd Government DocsNo ratings yet
- How Jesus Transforms The 10 CommandmentsDocument24 pagesHow Jesus Transforms The 10 CommandmentsJohn JiangNo ratings yet
- Customer Master - CIN Details Screen ChangesDocument4 pagesCustomer Master - CIN Details Screen Changespranav kumarNo ratings yet
- This Succession-Reviewer JethDocument184 pagesThis Succession-Reviewer JethMary Robelyn de Castro100% (1)
- Mr. Saxena - Reply To DV MatterDocument11 pagesMr. Saxena - Reply To DV MatterYash SampatNo ratings yet
- Chordu Piano Chords Ede Lobas Chordsheet Id - JBQiUlO0NDU PDFDocument3 pagesChordu Piano Chords Ede Lobas Chordsheet Id - JBQiUlO0NDU PDFKaren RochaNo ratings yet
- CD 116. Villaflor v. Summers, 41 Phil. 62 (1920)Document1 pageCD 116. Villaflor v. Summers, 41 Phil. 62 (1920)JMae MagatNo ratings yet
- Eleven Thousand Five Hundred Pesos (P11, 500.00)Document2 pagesEleven Thousand Five Hundred Pesos (P11, 500.00)bhem silverio100% (4)
- COM670 Chapter 5Document19 pagesCOM670 Chapter 5aakapsNo ratings yet
- Passbolt On AlmaLinux 9Document12 pagesPassbolt On AlmaLinux 9Xuân Lâm HuỳnhNo ratings yet
- Cases CrimproDocument139 pagesCases CrimproApril GonzagaNo ratings yet
- TaclobanCity2017 Audit Report PDFDocument170 pagesTaclobanCity2017 Audit Report PDFJulPadayaoNo ratings yet