You might also like
- S - Kuliah05 - 6 MARCH - FORCE IN 3DDocument27 pagesS - Kuliah05 - 6 MARCH - FORCE IN 3DFahmi FauziNo ratings yet
- F1 = 2 kNF2 = 3 kN F3 = 4 kNa = 1.5 mb = 1 mc = 2 md = 1 me = 1.5 mExpress each force as a Cartesian vectorDocument47 pagesF1 = 2 kNF2 = 3 kN F3 = 4 kNa = 1.5 mb = 1 mc = 2 md = 1 me = 1.5 mExpress each force as a Cartesian vectorNorsahira Binti MaslazimNo ratings yet
- Engineering Mechanics: StaticsDocument44 pagesEngineering Mechanics: StaticsDaya AhmadNo ratings yet
- Statics Chapter 2Document15 pagesStatics Chapter 2Karl KronosNo ratings yet
- S Kuliah06 (Position Vector)Document39 pagesS Kuliah06 (Position Vector)Fattihi EkhmalNo ratings yet
- CHAP 2 Part IIIDocument35 pagesCHAP 2 Part IIIvalmoresyazyNo ratings yet
- Force Vectors (Static)Document26 pagesForce Vectors (Static)Baran KirazNo ratings yet
- IntroDocument14 pagesIntrodsaNo ratings yet
- RZEGN3310 (Lecture 3) 2.5-2Document24 pagesRZEGN3310 (Lecture 3) 2.5-2Omar AlasNo ratings yet
- ME 121: Engineering Mechanics Position Vectors and Force RepresentationDocument26 pagesME 121: Engineering Mechanics Position Vectors and Force RepresentationMuhammad FahadNo ratings yet
- Lecture 4 - Sections 2.7-2.8Document17 pagesLecture 4 - Sections 2.7-2.8fannyparamitaNo ratings yet
- Position Vector: Directed From A To BDocument16 pagesPosition Vector: Directed From A To BM Jamshaid TahiriNo ratings yet
- Chapter 2.7-2.8Document32 pagesChapter 2.7-2.8haloNo ratings yet
- Vectors and Force System (Lec 7) ME 121Document16 pagesVectors and Force System (Lec 7) ME 121Farhan AliNo ratings yet
- Represent force along wing strut in 3-D Cartesian vector formDocument10 pagesRepresent force along wing strut in 3-D Cartesian vector formalaakilani1994No ratings yet
- HW 2 Solutions PDFDocument23 pagesHW 2 Solutions PDFJovani Perez100% (1)
- Ch. 3 SolutionsDocument41 pagesCh. 3 SolutionsLucas Merritt50% (2)
- Chapter 3.4, VectorsDocument11 pagesChapter 3.4, VectorsaungminsfuNo ratings yet
- Force Vectors, Vector Operations & Addition of Forces 2D & 3DDocument51 pagesForce Vectors, Vector Operations & Addition of Forces 2D & 3DparklNo ratings yet
- Worksheet - Chapter 1 - KeysDocument6 pagesWorksheet - Chapter 1 - KeysGam3a MzokraNo ratings yet
- 6 Forces in 3DDocument43 pages6 Forces in 3DKiel JohnNo ratings yet
- Engineering Electromagnetics: Reference SlideDocument27 pagesEngineering Electromagnetics: Reference SlideKybs nyhuNo ratings yet
- Shankersinhvaghelabapuinstitue of Technology: Branch:-Electronics and Communication EngineeringDocument3 pagesShankersinhvaghelabapuinstitue of Technology: Branch:-Electronics and Communication EngineeringShaina MabborangNo ratings yet
- Forces in 3DDocument11 pagesForces in 3DAdeboye BusayoNo ratings yet
- S Kuliah07 (Dot Product)Document25 pagesS Kuliah07 (Dot Product)Fattihi EkhmalNo ratings yet
- Chapter 01 - Introduction To Vector AnalysisDocument6 pagesChapter 01 - Introduction To Vector AnalysisJan Ebenezer MorionesNo ratings yet
- Statics of Particle Lecture 4 - Forces in Space (3D) : DR Shahruddin Bin Mahzan@Mohd ZinDocument23 pagesStatics of Particle Lecture 4 - Forces in Space (3D) : DR Shahruddin Bin Mahzan@Mohd ZinNorsahira Binti MaslazimNo ratings yet
- Chapter1.3 - Cartesian Coordinate SystemDocument7 pagesChapter1.3 - Cartesian Coordinate SystemVangie BautistaNo ratings yet
- Maths AlgebraDocument99 pagesMaths AlgebraBereketNo ratings yet
- Lecture Notes For Sections 2 - 5 - 2 - 6Document22 pagesLecture Notes For Sections 2 - 5 - 2 - 6Hani BanatNo ratings yet
- Calculating Resultant ForcesDocument30 pagesCalculating Resultant ForcesMu'adzAzriNo ratings yet
- كتاب المقرر الاستاتيكاDocument105 pagesكتاب المقرر الاستاتيكاEbrahem BarakaNo ratings yet
- CARTESIAN VECTORS ADDITION SUBTRACTIONDocument15 pagesCARTESIAN VECTORS ADDITION SUBTRACTIONzakNo ratings yet
- EMT - 2A - Cylindrical CoordinatesDocument59 pagesEMT - 2A - Cylindrical Coordinates5610Umar IqbalNo ratings yet
- Statics Force VectorsDocument37 pagesStatics Force VectorsAbdelkader MabroukNo ratings yet
- ME 482/582 Chapter 2 HW SolutionsDocument6 pagesME 482/582 Chapter 2 HW SolutionsPhạm Hữu PhướcNo ratings yet
- Experiment 8: Deflection of beams (Macaulay’s MethodDocument7 pagesExperiment 8: Deflection of beams (Macaulay’s Methodmalicat alwroodNo ratings yet
- IIT Kanpur Ph.D Selection Test QuestionsDocument3 pagesIIT Kanpur Ph.D Selection Test QuestionsSamadhan KambleNo ratings yet
- Unit 1 Chapter 4 (Rectangular Coordinates)Document6 pagesUnit 1 Chapter 4 (Rectangular Coordinates)Foysal ZaynNo ratings yet
- Homework 1Document1 pageHomework 1Eko Budi SatriyoNo ratings yet
- Topic 2: Vector Analysis: EE220 Electromagnetics For EE Lecture NoteDocument4 pagesTopic 2: Vector Analysis: EE220 Electromagnetics For EE Lecture Notericardo martinezNo ratings yet
- Vector Calculus Chapter ReviewDocument81 pagesVector Calculus Chapter ReviewEsubalew TeleleNo ratings yet
- Engineering Mechanics: Statics 3D VectorsDocument24 pagesEngineering Mechanics: Statics 3D VectorsMuhammad Fekrie Bin SarudinNo ratings yet
- HW 1 10 PDF FreeDocument22 pagesHW 1 10 PDF FreeCrimson MorangeNo ratings yet
- Statics, Lecture Notes, Chapter 4Document114 pagesStatics, Lecture Notes, Chapter 4RayanNo ratings yet
- hw1 Ece114-0 Even Nos 6th EdDocument16 pageshw1 Ece114-0 Even Nos 6th EdNadine FrisnediNo ratings yet
- BAB 3 BA501 Vector Dan ScalarDocument29 pagesBAB 3 BA501 Vector Dan ScalarAriez AriantoNo ratings yet
- Alg Exercises 3Document3 pagesAlg Exercises 3Cayuss Andrei MihăițoaiaNo ratings yet
- Position Vectors & Force Vectors: Today's ObjectivesDocument15 pagesPosition Vectors & Force Vectors: Today's ObjectivesSafa KhanNo ratings yet
- S - Kuliah04 - 2 MARCH - FORCE IN 3DDocument23 pagesS - Kuliah04 - 2 MARCH - FORCE IN 3DFahmi FauziNo ratings yet
- Vectors and CurvesDocument166 pagesVectors and Curvesmat456No ratings yet
- .Document20 pages.Girish ThorwadeNo ratings yet
- Assessmnet 02Document16 pagesAssessmnet 02Lekhani DasanayakeNo ratings yet
- System of Forces and Moment - Lecture 2Document42 pagesSystem of Forces and Moment - Lecture 2NoorhazlindaNo ratings yet
- Ch-1 Edited pptDocument66 pagesCh-1 Edited ppthamimmuhammedadem0579No ratings yet
- Es Module 1Document12 pagesEs Module 1Leyla GonzalezNo ratings yet
- Yisak Abu MathisDocument14 pagesYisak Abu MathisYisak AbuNo ratings yet
- Today's Objectives: We Are Able ToDocument26 pagesToday's Objectives: We Are Able ToMohamaadNo ratings yet
- Engineering Mechanics: Statics 3D VectorsDocument24 pagesEngineering Mechanics: Statics 3D VectorsMuhammad Fekrie Bin SarudinNo ratings yet
- S Kuliah03 Equin2dDocument31 pagesS Kuliah03 Equin2dMuhammad Fekrie Bin SarudinNo ratings yet
- S Kuliah02 1forcein2dDocument34 pagesS Kuliah02 1forcein2dMuhammad Fekrie Bin SarudinNo ratings yet
- Here are the answers to the exercises in three significant figures and SI units with prefixes:a. 15.9 μm/msb. 1.26 m/s c. 1.14 GNmDocument11 pagesHere are the answers to the exercises in three significant figures and SI units with prefixes:a. 15.9 μm/msb. 1.26 m/s c. 1.14 GNmMuhammad Fekrie Bin SarudinNo ratings yet
- Valve TrainingDocument25 pagesValve TrainingSameOldHat100% (1)
- 1 s2.0 S2213956721001821 MainDocument13 pages1 s2.0 S2213956721001821 MainChigoChigoNo ratings yet
- Midterm Quiz 3 StaticsDocument4 pagesMidterm Quiz 3 StaticsFerdinand Limba ĪīNo ratings yet
- Understanding Moores LawDocument136 pagesUnderstanding Moores Lawsasi kiran sNo ratings yet
- Me Lab 6Document9 pagesMe Lab 6BensoyNo ratings yet
- Easun Reyrolle 2TJM70 (20110307) PDFDocument2 pagesEasun Reyrolle 2TJM70 (20110307) PDFshashirajNo ratings yet
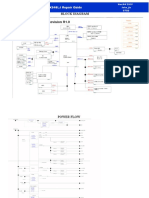
- Asus X540LJ Repair GuideDocument6 pagesAsus X540LJ Repair GuideCarlos GomesNo ratings yet
- GRE Chemistry Test: Practice BookDocument56 pagesGRE Chemistry Test: Practice BookDave Patrick EscalaNo ratings yet
- SE Current Monitoring Series H708-S6: DangerDocument3 pagesSE Current Monitoring Series H708-S6: DangerIsrael AldabaNo ratings yet
- Upgrade As You Grow Aesthetic Platform: LuminaDocument2 pagesUpgrade As You Grow Aesthetic Platform: Luminachash75No ratings yet
- HBL2VVRLAcatalogue PDFDocument12 pagesHBL2VVRLAcatalogue PDFMatias FranciscoNo ratings yet
- Preboard 1 TNP 2023Document8 pagesPreboard 1 TNP 2023RAUL BECERRONo ratings yet
- The Neglected Facts of Science by Dewey B LarsonDocument151 pagesThe Neglected Facts of Science by Dewey B LarsonJason Verbelli80% (5)
- Bernoulli's Principle and Application: Ang SovannDocument45 pagesBernoulli's Principle and Application: Ang SovannKantilal MalwaniaNo ratings yet
- OMAE2015-41911: Rheological Properties of Oil Based Drilling Fluids and Base OilsDocument8 pagesOMAE2015-41911: Rheological Properties of Oil Based Drilling Fluids and Base OilskmskskqNo ratings yet
- Manual Viscosimetro Fungilab Viscolead ONE enDocument49 pagesManual Viscosimetro Fungilab Viscolead ONE enWilfrank BadilloNo ratings yet
- Up-Aces Ce Quiz 2011Document8 pagesUp-Aces Ce Quiz 2011Claver G. MontesNo ratings yet
- 4FE-28Y-40P With FHU+60Document17 pages4FE-28Y-40P With FHU+60tedychrNo ratings yet
- SPE 125581 Global Laboratory Experience of CO2-EOR Flooding: V D V A I 1Document15 pagesSPE 125581 Global Laboratory Experience of CO2-EOR Flooding: V D V A I 1shayanepmNo ratings yet
- W2DU - Analisys Coaxial DipoleDocument14 pagesW2DU - Analisys Coaxial DipolebyponsNo ratings yet
- Physical Chemistry Exam Prep Section 1Document3 pagesPhysical Chemistry Exam Prep Section 1Darimi JohariNo ratings yet
- 3G3mx2-v2 Ds e 1 1 csm1126864Document54 pages3G3mx2-v2 Ds e 1 1 csm1126864Pertti HänninenNo ratings yet
- A10 A Pid Va 718602 201Document1 pageA10 A Pid Va 718602 201zhangNo ratings yet
- Aluminium Dome Roof InstallationDocument7 pagesAluminium Dome Roof Installationmuhammad.younisNo ratings yet
- Direct VariationDocument44 pagesDirect VariationMary Ann Rasco100% (1)
- MCQ Questions With AnsDocument22 pagesMCQ Questions With AnsPradnyesh VishwasraoNo ratings yet
- Gravitational Field Tutorial PHY101Document7 pagesGravitational Field Tutorial PHY101kalahanmoonga82No ratings yet
- Lecture 3 - Protein Adsorption Part 1 PDFDocument17 pagesLecture 3 - Protein Adsorption Part 1 PDFWesley ChiangNo ratings yet
- Electrical Installation and Maintenance Grade 11: Learning CompetencyDocument15 pagesElectrical Installation and Maintenance Grade 11: Learning CompetencyCristal Gumalang100% (5)
- Electronicbekm 2023Document159 pagesElectronicbekm 2023Bekir MouradNo ratings yet