You might also like
- Subject: Metrology and Measurements Class: Iv B.Tech-Isem (R13) Name of The Staff: M.Nagakiran Department: M.EDocument2 pagesSubject: Metrology and Measurements Class: Iv B.Tech-Isem (R13) Name of The Staff: M.Nagakiran Department: M.EkannakumarNo ratings yet
- Finite Elememnt Analysis of Pitman Arm: Sijith PM, Prof Shashank Gawade, Prof S.S KelkarDocument3 pagesFinite Elememnt Analysis of Pitman Arm: Sijith PM, Prof Shashank Gawade, Prof S.S KelkarSai reddyNo ratings yet
- Ae401eDocument8 pagesAe401eVijay KumbharNo ratings yet
- Syll 2002 KMDocument59 pagesSyll 2002 KMPrashant MeshramNo ratings yet
- Robotics: Designing the Mechanisms for Automated MachineryFrom EverandRobotics: Designing the Mechanisms for Automated MachineryRating: 4.5 out of 5 stars4.5/5 (8)
- SyllabusDocument4 pagesSyllabusTHAI XIN PING ROSEMONDNo ratings yet
- Industrial Robot Manipulators: Industrial Applications of RobotsDocument7 pagesIndustrial Robot Manipulators: Industrial Applications of RobotsSHIVAMNo ratings yet
- Industrial Robot Manipulators: Industrial Applications of RobotsDocument7 pagesIndustrial Robot Manipulators: Industrial Applications of RobotsSHIVAMNo ratings yet
- Modeling and Simulation of A TrackeDocument7 pagesModeling and Simulation of A TrackeOctavian AlexaNo ratings yet
- Automatic Balancing Robot: Madhuram.M (Assistant Professor)Document12 pagesAutomatic Balancing Robot: Madhuram.M (Assistant Professor)رشيد بن صغيرNo ratings yet
- Project Report FormatDocument31 pagesProject Report FormatRevatiNo ratings yet
- 9-John J. Craig, "Introduction To Robotics Mechanics and Control", Third Edition, 2005Document41 pages9-John J. Craig, "Introduction To Robotics Mechanics and Control", Third Edition, 2005tasenNo ratings yet
- Inverse Kinematics Analysis of A 5-Axis RV-2AJ Robot ManipulatorDocument8 pagesInverse Kinematics Analysis of A 5-Axis RV-2AJ Robot Manipulatoredward trianaNo ratings yet
- HES5310 Machine Dynamic 2Document39 pagesHES5310 Machine Dynamic 2Andy NgoNo ratings yet
- CNC Machines and Automation: Chapter ObjectivesDocument4 pagesCNC Machines and Automation: Chapter ObjectivesAbhijeet PramanikNo ratings yet
- EPC431 2020 Present 2 - Robot Structure and ComponentsDocument9 pagesEPC431 2020 Present 2 - Robot Structure and ComponentsOngNo ratings yet
- 6.01 Course Notes Fall 2009Document300 pages6.01 Course Notes Fall 2009flag43No ratings yet
- Design of Fuzzy Logic Based Controller For Gyroscopic Inverted PendulumDocument8 pagesDesign of Fuzzy Logic Based Controller For Gyroscopic Inverted Pendulumban bekasNo ratings yet
- 5.1. Computer Applications in Mechanical Drafting, Design and AnalysisDocument15 pages5.1. Computer Applications in Mechanical Drafting, Design and AnalysisDIA WORLDNo ratings yet
- Rampaging Chariot Manual 2015Document68 pagesRampaging Chariot Manual 2015GiuanpeppeNo ratings yet
- Design and Implementation of Self-Balanced Robot Using Proteus Design Tool and Arduino-UnoDocument8 pagesDesign and Implementation of Self-Balanced Robot Using Proteus Design Tool and Arduino-UnoSuresh MehtaNo ratings yet
- Important Questions and Answers - Robot Drive Systems and End Effectors PDFDocument5 pagesImportant Questions and Answers - Robot Drive Systems and End Effectors PDFvicky tNo ratings yet
- Lecture Spring2023Document15 pagesLecture Spring2023Maram GamalNo ratings yet
- Feedback Control of A Balancing RobotDocument6 pagesFeedback Control of A Balancing RobotEsteban GutiérrezNo ratings yet
- The Control of A Highly Nonlinear Two-Wheels Balancing Robot: A Comparative Assessment Between LQR and PID-PID Control SchemesDocument6 pagesThe Control of A Highly Nonlinear Two-Wheels Balancing Robot: A Comparative Assessment Between LQR and PID-PID Control SchemesKhiêm NguyễnNo ratings yet
- Mechanical Design of A Four-Wheel Independent Drive and Steering Mobile Robot PlatformDocument5 pagesMechanical Design of A Four-Wheel Independent Drive and Steering Mobile Robot PlatformIbrahimNo ratings yet
- L1.0 Intro To Robot Anatomy - 1Document59 pagesL1.0 Intro To Robot Anatomy - 1Dr. MaheshwarNo ratings yet
- Robotics NotesDocument61 pagesRobotics NotesMech HoD DAITNo ratings yet
- Ipe 419 Cim May 2022Document134 pagesIpe 419 Cim May 2022Indranil NiloyNo ratings yet
- Wired Control Robotic ArmDocument5 pagesWired Control Robotic Armjeevan kumarNo ratings yet
- HRT-HOOD™: A Structured Design Method for Hard Real-Time Ada SystemsFrom EverandHRT-HOOD™: A Structured Design Method for Hard Real-Time Ada SystemsNo ratings yet
- Robotic Arc WeldingDocument38 pagesRobotic Arc Weldingamirhazwan100% (2)
- Yousri Mahmoud Diab Wmsra 6Document11 pagesYousri Mahmoud Diab Wmsra 6Sherrine HartonoNo ratings yet
- Controller of 6 DOF Robotic Arm: Group MembersDocument23 pagesController of 6 DOF Robotic Arm: Group MembersJam Asif ManzoorNo ratings yet
- Forward and Inverse Kinematics Model For PDFDocument6 pagesForward and Inverse Kinematics Model For PDFGuilherme SixeNo ratings yet
- Kinematic Modelling and Analysis of A 5 Axis Articulated Robot Arm Model VRT 502 IJERTV4IS070484 PDFDocument5 pagesKinematic Modelling and Analysis of A 5 Axis Articulated Robot Arm Model VRT 502 IJERTV4IS070484 PDFAkib SheikhNo ratings yet
- OptistructDocument85 pagesOptistructSahithyananda ShashidharNo ratings yet
- ME553 OverviewDocument1 pageME553 OverviewYagnesh MandliNo ratings yet
- Shirmp 2Document7 pagesShirmp 2Khizer KhanNo ratings yet
- Presentation of Welding RobotDocument28 pagesPresentation of Welding RobotKirubel MogesNo ratings yet
- Razzle Dazzle Senior Design Group #6 Design Review IIDocument20 pagesRazzle Dazzle Senior Design Group #6 Design Review IIapi-355300487No ratings yet
- ME4555 TwoMass Control Spring2021 PART 1 2Document18 pagesME4555 TwoMass Control Spring2021 PART 1 2Rax UtaNo ratings yet
- Cercetari Privind Echilibrarea Pendulului Invers Research Concerning The Equilibration of The Inverted PendulumDocument8 pagesCercetari Privind Echilibrarea Pendulului Invers Research Concerning The Equilibration of The Inverted PendulumFanica ScarlatNo ratings yet
- 07 Opto-Mechanical HardwareDocument16 pages07 Opto-Mechanical Hardwareaj7scribdNo ratings yet
- Robert J Shilling Fundamentals of Robotics PDFDocument447 pagesRobert J Shilling Fundamentals of Robotics PDFFaiez AliNo ratings yet
- Ba-030e5 Instrucciones - V4 - EngDocument58 pagesBa-030e5 Instrucciones - V4 - Engbraulio jimenezNo ratings yet
- IJCAS v4 n6 pp.756-762Document8 pagesIJCAS v4 n6 pp.756-762marco3000xxxNo ratings yet
- Intelligent Reverse Braking System Mech ProjDocument48 pagesIntelligent Reverse Braking System Mech ProjTariq Najeeb100% (2)
- Robust Control Design of 6-DOF Robot For Nuclear Power Plant DismantlingDocument7 pagesRobust Control Design of 6-DOF Robot For Nuclear Power Plant DismantlingjilitwoNo ratings yet
- AU Ball On Plate Balancing Robot: December 2015Document5 pagesAU Ball On Plate Balancing Robot: December 2015Nawara NawaraNo ratings yet
- 0521895944-Carte RobotiDocument361 pages0521895944-Carte RobotiGeanina BoboceaNo ratings yet
- User Manual: Redundancy Configuration Industrial ETHERNET (Gigabit) Switch RS20/RS30/RS40, MS20/MS30, OCTOPUSDocument78 pagesUser Manual: Redundancy Configuration Industrial ETHERNET (Gigabit) Switch RS20/RS30/RS40, MS20/MS30, OCTOPUSMichael adu-boahenNo ratings yet
- ABB Training ReportDocument22 pagesABB Training Reportthanh_cdt01No ratings yet
- Drive Field KCL 20181004ESAGIntegrated Motion Update October 2018Document54 pagesDrive Field KCL 20181004ESAGIntegrated Motion Update October 2018vuNo ratings yet
- 112108298Document1,017 pages112108298Aryan RaiNo ratings yet
- Hardware in The Loop - Closed Loop - ExperimentsDocument8 pagesHardware in The Loop - Closed Loop - ExperimentsJoel LandívarNo ratings yet
- Paper FinalDocument7 pagesPaper Finalali rajaNo ratings yet
- Chapname Name Topic Sub TopicDocument4 pagesChapname Name Topic Sub TopicScientist SakthivelNo ratings yet
- UG Student HandbookDocument130 pagesUG Student Handbooksaleh khanNo ratings yet
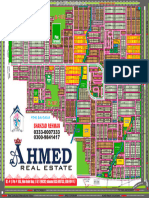
- Ahmed G-16 Map NEWDocument1 pageAhmed G-16 Map NEWsaleh khanNo ratings yet
- English WorkDocument10 pagesEnglish Worksaleh khanNo ratings yet
- BenidormDocument11 pagesBenidormsaleh khanNo ratings yet
- Aerospace Applications of PKMDocument16 pagesAerospace Applications of PKMsaleh khanNo ratings yet
- Dynamics of PKMDocument37 pagesDynamics of PKMsaleh khanNo ratings yet
- Robot Specification PDFDocument27 pagesRobot Specification PDFCRAZY JHXNo ratings yet
- Application of AI in Robotics and Its OpportunitiesDocument24 pagesApplication of AI in Robotics and Its Opportunitiesmrunali_pNo ratings yet
- Scriptie - revOSPDocument97 pagesScriptie - revOSPD scribdNo ratings yet
- Advanced Automation Techniques in Adaptive by Xiaoqi Chen and Rajagopalan Devanathan, Aik Meng Fong.Document321 pagesAdvanced Automation Techniques in Adaptive by Xiaoqi Chen and Rajagopalan Devanathan, Aik Meng Fong.ismailNo ratings yet
- Arburg-Micro Injection MouldingDocument12 pagesArburg-Micro Injection Mouldingweb312_twNo ratings yet
- Automation & Artificial Intelligence: Robots and Their ApplicationsDocument93 pagesAutomation & Artificial Intelligence: Robots and Their ApplicationsManal AndhereNo ratings yet
- Controller enDocument32 pagesController enAggelos VelegrakisNo ratings yet
- Harshadkumar Patel: Career ObjectiveDocument21 pagesHarshadkumar Patel: Career ObjectivegocoolonNo ratings yet
- Wired For War Book Review by Chong Shi HaoDocument4 pagesWired For War Book Review by Chong Shi HaogeorgegimNo ratings yet
- Calibration: Advanced Robotics For EveryoneDocument1 pageCalibration: Advanced Robotics For EveryoneMARIO FUENTESNo ratings yet
- The Menagerie - PrinterfriendlyDocument97 pagesThe Menagerie - PrinterfriendlyAndrew FentonNo ratings yet
- Artificial IntelligenceDocument12 pagesArtificial IntelligenceArshdeep SinghNo ratings yet
- Design and Implementation of Chess-Playing Robotic System: Firas Abdullah Thweny Al-Saedi, Ali H. MohammedDocument9 pagesDesign and Implementation of Chess-Playing Robotic System: Firas Abdullah Thweny Al-Saedi, Ali H. MohammedUIoiNo ratings yet
- 7 Use Cases of AI in Manufacturing IndustryDocument1 page7 Use Cases of AI in Manufacturing IndustryGrapestech SolutionNo ratings yet
- Interests: Firstname LastnameDocument3 pagesInterests: Firstname LastnameAIT ELHAJ BRAHIMNo ratings yet
- Unit 4 - Bhs InggrisDocument9 pagesUnit 4 - Bhs InggrisPoppy Rahmatika PrimandiriNo ratings yet
- An Agricultural Robotfor Multipurpose Operationsina GreenhouseDocument11 pagesAn Agricultural Robotfor Multipurpose Operationsina GreenhouseVillan teamNo ratings yet
- Lab 1Document23 pagesLab 1N MNo ratings yet
- Draw The Velocity and Acceleration Diagram of Mechanism, by Anish DebnathDocument15 pagesDraw The Velocity and Acceleration Diagram of Mechanism, by Anish DebnathAnish Dungeon100% (1)
- Rope Climbing Robot 1 StageDocument41 pagesRope Climbing Robot 1 Stage856- Pandurang DombaleNo ratings yet
- Emerging Science and Technology Trends: 2017-2047: A Synthesis of Leading ForecastsDocument56 pagesEmerging Science and Technology Trends: 2017-2047: A Synthesis of Leading ForecastsNimra Naveed ShaikhNo ratings yet
- Design and Development of Robotic With 4-Degree of Freedom: Imayam College of EngineeringDocument14 pagesDesign and Development of Robotic With 4-Degree of Freedom: Imayam College of EngineeringvinothkumarNo ratings yet
- The Impact of The 4th Industrial Revolution On Jobs and The SectorDocument25 pagesThe Impact of The 4th Industrial Revolution On Jobs and The SectorsilveriserNo ratings yet
- List of Mechanical ProjectsDocument4 pagesList of Mechanical Projectssonalibara100% (2)
- Bet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Document20 pagesBet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Abhay BhujNo ratings yet
- ICRITO2021 Paper 0177Document7 pagesICRITO2021 Paper 0177Satya UpadhyayNo ratings yet
- Flower Knitting Machine: R.Anandhi, D.Kowsalya and N.Jerusha ChintuDocument3 pagesFlower Knitting Machine: R.Anandhi, D.Kowsalya and N.Jerusha ChintuaruljeromeNo ratings yet
- Individual Assignment-SMDocument17 pagesIndividual Assignment-SMEileen OngNo ratings yet
- ManfDocument34 pagesManfAnantha NarayananNo ratings yet
- 2016 December Barcelona Conference ProgramDocument82 pages2016 December Barcelona Conference ProgramBahadır AkbalNo ratings yet