You might also like
- Solution:: 3-1 Graphing Quadratic FunctionsDocument58 pagesSolution:: 3-1 Graphing Quadratic FunctionsHasan EserNo ratings yet
- Shape FunctDocument46 pagesShape FunctKashmir JamadarNo ratings yet
- Test Bank for Precalculus: Functions & GraphsFrom EverandTest Bank for Precalculus: Functions & GraphsRating: 5 out of 5 stars5/5 (1)
- Correlated Report and Action Plan - FinalDocument30 pagesCorrelated Report and Action Plan - FinalOpenFileCGYNo ratings yet
- High Entropy AlloysDocument24 pagesHigh Entropy AlloysDevangGandhi7100% (1)
- MANE 4240 & CIVL 4240 Introduction To Finite ElementsDocument42 pagesMANE 4240 & CIVL 4240 Introduction To Finite ElementsvishnugopalSNo ratings yet
- Isoparametric FormulationDocument42 pagesIsoparametric FormulationLarryNo ratings yet
- Revision FourierDocument19 pagesRevision FourierHazim NaharNo ratings yet
- Finite Element Method and Boundary Element Methods: (Subject Code: 08ED07)Document7 pagesFinite Element Method and Boundary Element Methods: (Subject Code: 08ED07)Sreejith S NairNo ratings yet
- Divide and Conquer Strategy for Computer AlgorithmsDocument85 pagesDivide and Conquer Strategy for Computer AlgorithmsMahesh PandeNo ratings yet
- Higher Order Interpolation and QuadratureDocument12 pagesHigher Order Interpolation and QuadratureTahir AedNo ratings yet
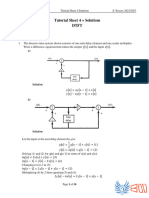
- DSP 1st Exam SolutionsDocument5 pagesDSP 1st Exam Solutionsعمار طعمةNo ratings yet
- Sum N N SequencesDocument17 pagesSum N N SequencesMonika3404795No ratings yet
- 3 Advanced Rod Elements and Requirements For The Numerical SolutionDocument40 pages3 Advanced Rod Elements and Requirements For The Numerical SolutionEleonora InghelleriNo ratings yet
- LEGENDRE POLYNOMIALSDocument6 pagesLEGENDRE POLYNOMIALSFrancis Jr CastroNo ratings yet
- Lecture 3 Quarter Point 2DDocument19 pagesLecture 3 Quarter Point 2DBogdan NedelcuNo ratings yet
- Generation Requirements Shape FunctDocument34 pagesGeneration Requirements Shape FunctyohplalaNo ratings yet
- FEM Higher Order ElementsDocument28 pagesFEM Higher Order Elementsjoshibec100% (1)
- Recursive algorithmsDocument6 pagesRecursive algorithmsRaheel AhmadNo ratings yet
- MEEN 673 Nonlinear Finite Element Analysis: Read: Nonlinear Bending of Strait BeamsDocument39 pagesMEEN 673 Nonlinear Finite Element Analysis: Read: Nonlinear Bending of Strait Beams曲健No ratings yet
- 2014 2 JOHOR SMKTinggiKluang Maths QADocument8 pages2014 2 JOHOR SMKTinggiKluang Maths QASK100% (2)
- Chpt05-FEM For 2D SolidsnewDocument56 pagesChpt05-FEM For 2D SolidsnewKrishna MyakalaNo ratings yet
- AIEEE 2004 MathsDocument21 pagesAIEEE 2004 MathsKainshk GuptaNo ratings yet
- Merge Sort SeminarDocument22 pagesMerge Sort SeminarChaitanya BharadwajNo ratings yet
- Tarea2 Estudiante5 JulianperezDocument5 pagesTarea2 Estudiante5 JulianperezJulian NoyNo ratings yet
- Sheet 9 - EigVal & EigVec (ANS)Document4 pagesSheet 9 - EigVal & EigVec (ANS)Saifaldin ElabyadNo ratings yet
- Maulina Putri Lestari - M0220052 - Tugas 3Document10 pagesMaulina Putri Lestari - M0220052 - Tugas 3Maulina Putri LestariNo ratings yet
- Legendre Polynomials:) C ( (X) C 1 N 0Document11 pagesLegendre Polynomials:) C ( (X) C 1 N 0Ahmed HwaidiNo ratings yet
- AIEEE-2004 Question Paper With Sol-Maths 2004 EntrancesofIndia PDFDocument21 pagesAIEEE-2004 Question Paper With Sol-Maths 2004 EntrancesofIndia PDFLakshya ojhaNo ratings yet
- On some equations concerning some topics of Field Theory and Gravity and String Theory. Mathematical connections and applications of κ formula regarding the Zeros of Riemann Zeta Function and some Ramanujan formulas. IVDocument145 pagesOn some equations concerning some topics of Field Theory and Gravity and String Theory. Mathematical connections and applications of κ formula regarding the Zeros of Riemann Zeta Function and some Ramanujan formulas. IVAntonio NardelliNo ratings yet
- Assignment 3: Shahrzad Tighnavardmollasaraei 260413622 February 29, 2012Document3 pagesAssignment 3: Shahrzad Tighnavardmollasaraei 260413622 February 29, 2012Neev TighnavardNo ratings yet
- Solution Total DistributionsDocument5 pagesSolution Total Distributions8rztNo ratings yet
- 2011 Set B Mock Paper 1 SolutionsDocument15 pages2011 Set B Mock Paper 1 SolutionsJordan TiongNo ratings yet
- CSC323 Sp2016 QB Module 1 Efficiency of AlgorithmsDocument14 pagesCSC323 Sp2016 QB Module 1 Efficiency of AlgorithmsAhmed FawzyNo ratings yet
- 18th March Shift-1 Mathematics (Crackjee - Xyz)Document12 pages18th March Shift-1 Mathematics (Crackjee - Xyz)StockPlusIndiaNo ratings yet
- Unit 5 NotesDocument56 pagesUnit 5 NotesDamotharan Sathesh KumarNo ratings yet
- Recurrence Relations 2.4 Q.17Document3 pagesRecurrence Relations 2.4 Q.17Muhammad ZainNo ratings yet
- Sheet 1Document4 pagesSheet 1Shimaa AshrafNo ratings yet
- 11 em One MarkDocument20 pages11 em One MarkR.SrinivasanNo ratings yet
- N) For Some Integer Value of N. For: NT) JNDocument7 pagesN) For Some Integer Value of N. For: NT) JNapi-127299018No ratings yet
- Allen: Final Jee-Main Examination - August, 2021Document3 pagesAllen: Final Jee-Main Examination - August, 2021K DHANALAKSHMI K DHANALAKSHMINo ratings yet
- Answers To Selected Problems: (!if) (!if)Document10 pagesAnswers To Selected Problems: (!if) (!if)Hasan Al BannaNo ratings yet
- Tutorial 4 SolutionsDocument10 pagesTutorial 4 Solutionssama abd elgelilNo ratings yet
- Maulina Putri Lestari - M0220052 - Tugas 1Document5 pagesMaulina Putri Lestari - M0220052 - Tugas 1Maulina Putri LestariNo ratings yet
- Math Stats Booklet 1Document20 pagesMath Stats Booklet 1Koh Boon HaoNo ratings yet
- Chapter - 3Document20 pagesChapter - 3gebretsadkan abrhaNo ratings yet
- Digital Signal Processing: Dr. MuayadDocument9 pagesDigital Signal Processing: Dr. MuayadWisam QqqNo ratings yet
- Introduction To FemDocument21 pagesIntroduction To FemPavan KishoreNo ratings yet
- Maatthheem Maattiiccs: FI Iiit TJ JEDocument5 pagesMaatthheem Maattiiccs: FI Iiit TJ JEheroNo ratings yet
- Intersection Assingment - 1Document9 pagesIntersection Assingment - 1Surya PappuNo ratings yet
- Problems on Signals and SystemsDocument6 pagesProblems on Signals and SystemsOral RobertzNo ratings yet
- Scheme of ValuationDocument20 pagesScheme of ValuationRaghu Nandan HukkardeNo ratings yet
- Jee Advanced 2018 Top 10 Ranks Mathematics QuestionsDocument15 pagesJee Advanced 2018 Top 10 Ranks Mathematics QuestionschandraNo ratings yet
- FactorialesDocument2 pagesFactorialesCristian Daniel BerettaNo ratings yet
- Average Case Analysis of Quick SortDocument24 pagesAverage Case Analysis of Quick SortRidhima Kunal SharmaNo ratings yet
- CST 370 - Spring A 2020 Homework 3: Answer: 1Document4 pagesCST 370 - Spring A 2020 Homework 3: Answer: 1api-427618266No ratings yet
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Analytic Geometry: Graphic Solutions Using Matlab LanguageFrom EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Local and Global TechnopreneursDocument25 pagesLocal and Global TechnopreneursClaire FloresNo ratings yet
- Vienna Convention 1963Document21 pagesVienna Convention 1963Sonia Celinda aNo ratings yet
- Physiology and Physiological Disorders of PepperDocument45 pagesPhysiology and Physiological Disorders of PepperKwesiga Julius75% (4)
- 11 M-Way Search TreesDocument33 pages11 M-Way Search TreesguptharishNo ratings yet
- QZ Brand GuideDocument8 pagesQZ Brand GuideahmaliicNo ratings yet
- 1920s Irish Crochet Lace Edging OriginalDocument8 pages1920s Irish Crochet Lace Edging OriginalLaura HortopanuNo ratings yet
- 1.1 Online Shopping Is The Process Whereby Consumers Directly Buy Goods Services Ete From ADocument5 pages1.1 Online Shopping Is The Process Whereby Consumers Directly Buy Goods Services Ete From Aഅർജുൻ പിണറായിNo ratings yet
- Data Sheet - DPX3 - 630 - MT - ENGv1.3 PDFDocument13 pagesData Sheet - DPX3 - 630 - MT - ENGv1.3 PDFEdwin Armando Abella P.No ratings yet
- United International University: Post Graduate Diploma in Human Resource Management Course TitleDocument20 pagesUnited International University: Post Graduate Diploma in Human Resource Management Course TitleArpon Kumer DasNo ratings yet
- Alfornon Joshua Madjos. Strategic Management Bsba 3FDocument7 pagesAlfornon Joshua Madjos. Strategic Management Bsba 3FJoshua AlfornonNo ratings yet
- Schematic Diagrams: 8.1 Outside DimensionsDocument2 pagesSchematic Diagrams: 8.1 Outside DimensionsDeen ewNo ratings yet
- United States Bankruptcy Court Eastern District of Michigan Southern DivisionDocument14 pagesUnited States Bankruptcy Court Eastern District of Michigan Southern DivisionChapter 11 DocketsNo ratings yet
- Absent Father, Absent Mother: Its Effect in The Behavior and Academic Performance of The Senior High School in SPCCDocument3 pagesAbsent Father, Absent Mother: Its Effect in The Behavior and Academic Performance of The Senior High School in SPCCRendel PorlaresNo ratings yet
- Error RegconitionDocument15 pagesError RegconitionNguyễn Trần Hoài ÂnNo ratings yet
- Characteristics: EXPERIMENT 08: SPICE Simulation of and Implementation For MOSFETDocument11 pagesCharacteristics: EXPERIMENT 08: SPICE Simulation of and Implementation For MOSFETJohnny NadarNo ratings yet
- Supply Chain Analysis of PRAN GroupDocument34 pagesSupply Chain Analysis of PRAN GroupAtiqEyashirKanakNo ratings yet
- Working Capital ManagmentDocument7 pagesWorking Capital ManagmentMarie ElliottNo ratings yet
- Technical English 1-Question BankDocument15 pagesTechnical English 1-Question BankdevabharathiNo ratings yet
- ART. 1326 - ART 1335 DiscussionDocument20 pagesART. 1326 - ART 1335 DiscussionJessica JamonNo ratings yet
- Court of Appeals decision on Batara family land disputeDocument19 pagesCourt of Appeals decision on Batara family land disputeKhanini GandamraNo ratings yet
- In 002756Document1 pageIn 002756aljanaNo ratings yet
- Kumba Resources: Case StudiesDocument12 pagesKumba Resources: Case StudiesAdnan PitafiNo ratings yet
- The List, Stack, and Queue Adts Abstract Data Type (Adt)Document17 pagesThe List, Stack, and Queue Adts Abstract Data Type (Adt)Jennelyn SusonNo ratings yet
- RESOLUTION (Authorize To Withdraw)Document2 pagesRESOLUTION (Authorize To Withdraw)Neil Gloria100% (4)
- Economics of The Environment - Theory and Policy (PDFDrive)Document328 pagesEconomics of The Environment - Theory and Policy (PDFDrive)danysubash100% (1)
- Tugas Kelompok Pend.b.asing 3Document5 pagesTugas Kelompok Pend.b.asing 3Akun YoutubeNo ratings yet
- The Effective Length of Columns in MultiDocument12 pagesThe Effective Length of Columns in MulticoolkaisyNo ratings yet
- 1 Indian Pharma Cos Directory SamplesDocument61 pages1 Indian Pharma Cos Directory SamplesUmesh BatraNo ratings yet