You might also like
- Chapter 4 - MP DSBDocument42 pagesChapter 4 - MP DSBsheham ihjamNo ratings yet
- Microprocessors CSE - 341: 8086/8088 Hardware SpecificationDocument26 pagesMicroprocessors CSE - 341: 8086/8088 Hardware SpecificationIrum SabaNo ratings yet
- System Bus Structure: Minimum Mode 8086 Pin ConfigurationsDocument89 pagesSystem Bus Structure: Minimum Mode 8086 Pin ConfigurationsramprasadNo ratings yet
- Microprocessors 8086, 8088Document16 pagesMicroprocessors 8086, 8088نفیسه احمدیNo ratings yet
- Memory Interface and Pin Functions of 8086/8088 MicroprocessorDocument15 pagesMemory Interface and Pin Functions of 8086/8088 Microprocessorpravin2275767No ratings yet
- 8086-8088 Hardware SpecificationsDocument115 pages8086-8088 Hardware Specificationsfanellex1100% (1)
- 8086 Hardware SpecificationDocument84 pages8086 Hardware SpecificationVikram Santhosh100% (1)
- Computer and Interfacing Chapter Six Pin and Clock GeneratorDocument78 pagesComputer and Interfacing Chapter Six Pin and Clock GeneratormigadNo ratings yet
- Overview or Features of 8086: It Is A 16-Bit MicroprocessorDocument33 pagesOverview or Features of 8086: It Is A 16-Bit MicroprocessorSamuel KuantumNo ratings yet
- 8086 Hardware Specification: Segment 5Document19 pages8086 Hardware Specification: Segment 5Tigabu YayaNo ratings yet
- 8086 8088 Hardware SpecificationsDocument28 pages8086 8088 Hardware SpecificationsJac ChanchalNo ratings yet
- Sigals 8086Document31 pagesSigals 8086RajaRaman.GNo ratings yet
- mic_unit1Document21 pagesmic_unit1xboyxman1000No ratings yet
- Advanced Microprocessors Pin DetailsDocument39 pagesAdvanced Microprocessors Pin DetailsVinoda DhayanitheNo ratings yet
- Unit 2 8086 System Bus Structures FullunitDocument36 pagesUnit 2 8086 System Bus Structures Fullunitlauro eugin brittoNo ratings yet
- Maximum Mode 8086 SystemDocument9 pagesMaximum Mode 8086 Systemchenna838No ratings yet
- 7.) CS EEE F241 8086 Pinout PDFDocument75 pages7.) CS EEE F241 8086 Pinout PDFusoppNo ratings yet
- COE305 Chapter 9Document55 pagesCOE305 Chapter 9Rajesh TiwaryNo ratings yet
- U3 8086 MicroprocessorDocument10 pagesU3 8086 MicroprocessorNishant Singh ChauhanNo ratings yet
- Unit 3 8086 Microprocessor InterfacingDocument29 pagesUnit 3 8086 Microprocessor InterfacingDere JesusNo ratings yet
- Unit III 8086 Microprocessor InterfacingDocument26 pagesUnit III 8086 Microprocessor InterfacingRammanohar Lokiya100% (1)
- Intel 8086/8088 Microprocessor Minimum and Maximum Mode OperationDocument61 pagesIntel 8086/8088 Microprocessor Minimum and Maximum Mode Operationkshtgarg21No ratings yet
- Chapter 6Document26 pagesChapter 6Gcross NGNo ratings yet
- Lecture 4 - 5 - 6 - CSE - Microprocessor and Assembly LanguageDocument63 pagesLecture 4 - 5 - 6 - CSE - Microprocessor and Assembly LanguagefaridulNo ratings yet
- 8086 MicroprocessorDocument19 pages8086 MicroprocessorAchyut TripathiNo ratings yet
- 8086/8088 Hardware Specifications: CEN433 King Saud University Dr. Mohammed Amer ArafahDocument69 pages8086/8088 Hardware Specifications: CEN433 King Saud University Dr. Mohammed Amer ArafahHarold Carlos Ureña HerreraNo ratings yet
- 8086 FullDocument72 pages8086 FullNandhini Nachiyar100% (4)
- 8086 Pin Diagram and Descriptions in 40 CharactersDocument9 pages8086 Pin Diagram and Descriptions in 40 Characters12343567890100% (2)
- 8086 MicroprocessorDocument4 pages8086 MicroprocessorTanu GuptaNo ratings yet
- Introduction To 8086 Microprocessor (Part 4)Document19 pagesIntroduction To 8086 Microprocessor (Part 4)nobodyNo ratings yet
- Bidirectional Visitor CounterDocument17 pagesBidirectional Visitor CounterPankaj KumarNo ratings yet
- Distance Measurement SystemDocument31 pagesDistance Measurement Systemnikhitha100% (1)
- Chapter 9Document20 pagesChapter 9sandeep4672kvkNo ratings yet
- 8086 NotesDocument43 pages8086 NotesSuma LathaNo ratings yet
- The 8088/8086 Microprocessors and Their Memory and Input/Output InterfaceDocument37 pagesThe 8088/8086 Microprocessors and Their Memory and Input/Output InterfaceKanaan JalalNo ratings yet
- Unit 1 8086 16 Bit MicroprocessorDocument17 pagesUnit 1 8086 16 Bit MicroprocessorManofwarrior100% (1)
- Minimum Maximum ModeDocument29 pagesMinimum Maximum ModeVaibhav GodboleNo ratings yet
- Overview or Features of 8086Document33 pagesOverview or Features of 8086Supraja SundaresanNo ratings yet
- Department of Technical Education Andhra Pradesh: 9CM405.7TO8 1 1Document19 pagesDepartment of Technical Education Andhra Pradesh: 9CM405.7TO8 1 1Y. S.V.Ramana raoNo ratings yet
- Unit III MPMC MaterialDocument33 pagesUnit III MPMC Materialsree2728No ratings yet
- DIO SurvivalDocument6 pagesDIO Survivalapi-3711702No ratings yet
- 6Document35 pages6Ankit Sethia100% (3)
- 8088 8-Bit Hmos Microprocessor 8088/8088-2Document30 pages8088 8-Bit Hmos Microprocessor 8088/8088-2Alexandro Manuel Ku LopezNo ratings yet
- Microprocessor 8088Document11 pagesMicroprocessor 8088bobby khanNo ratings yet
- 8086 Microprocessor Lecture NotesDocument15 pages8086 Microprocessor Lecture NotesayushNo ratings yet
- 8085 Microprocessor Signal GroupsDocument27 pages8085 Microprocessor Signal GroupsSheena Ann StonehillNo ratings yet
- Microprocessor and MicroprocessorDocument36 pagesMicroprocessor and Microprocessormondalsudeep222No ratings yet
- 8051 Microcontroller Hardware Interfacing Tutorials - Basic Circuit For 8051Document4 pages8051 Microcontroller Hardware Interfacing Tutorials - Basic Circuit For 8051Lakshmanan SivalingamNo ratings yet
- 8086 Microprocessor Signal Description for Minimum and Maximum ModesDocument8 pages8086 Microprocessor Signal Description for Minimum and Maximum ModesRabiul Robi100% (1)
- Pin Config1 SNKDocument6 pagesPin Config1 SNKKirthi RkNo ratings yet
- 2-16 Bit Microprocessor 8086Document20 pages2-16 Bit Microprocessor 8086afzal_a75% (4)
- MC Unit 4Document42 pagesMC Unit 4Kalai VaniNo ratings yet
- Power Supply:: TransformerDocument17 pagesPower Supply:: Transformerobula863No ratings yet
- 8086 ArchitectureDocument35 pages8086 Architecturemishamoamanuel574No ratings yet
- 8051 Microcontroller Lab ManualDocument28 pages8051 Microcontroller Lab ManualAjay PatilNo ratings yet
- DI Module With RS485Document10 pagesDI Module With RS485Yasser RagabNo ratings yet
- TrackerDocument93 pagesTrackerashutosh kumarNo ratings yet
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142From EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142No ratings yet
- How Interrupts Work in ProcessorsDocument63 pagesHow Interrupts Work in Processorswogayehu.ANo ratings yet
- Chapter 4Document48 pagesChapter 4wogayehu.ANo ratings yet
- Chapter 1Document51 pagesChapter 1wogayehu.ANo ratings yet
- Part7 AdvancedAssemblyDocument37 pagesPart7 AdvancedAssemblywogayehu.ANo ratings yet
- Check string length and search characterDocument1 pageCheck string length and search characterwogayehu.ANo ratings yet
- ITQ Series: Economic Style Electric ActuatorDocument8 pagesITQ Series: Economic Style Electric ActuatorVaitheeswaran PalaniNo ratings yet
- NEFIS User ManualDocument68 pagesNEFIS User ManualAnonymous K02EhzNo ratings yet
- ISD1700 Design GuideDocument82 pagesISD1700 Design GuideMaxi03462No ratings yet
- Lempel ZivDocument22 pagesLempel ZivHoós LászlóNo ratings yet
- 3144/3146 16-Channel Analog Output Cards: Technical ManualDocument42 pages3144/3146 16-Channel Analog Output Cards: Technical ManualJosé Miguel Espinoza JiménezNo ratings yet
- Electrical SystemsDocument62 pagesElectrical Systemsrajat kumar100% (1)
- Fortinet Fortigate Workspot Configuration Guide 1.0Document13 pagesFortinet Fortigate Workspot Configuration Guide 1.0Abdelilah CharboubNo ratings yet
- Project Plan Platinum Ceramic Gresik VER05 14 11 2020Document30 pagesProject Plan Platinum Ceramic Gresik VER05 14 11 2020NanangDatadikJatimNo ratings yet
- Reversing With Ghidra-InFILTRATE2020Document3 pagesReversing With Ghidra-InFILTRATE2020IVONo ratings yet
- English NotesDocument26 pagesEnglish Notesramzanm73% (11)
- JVC MXG 71 R Service ManualDocument86 pagesJVC MXG 71 R Service ManualZoran BunčićNo ratings yet
- Instruction Manual: 9.ECO.01.ANGDocument67 pagesInstruction Manual: 9.ECO.01.ANGCorel MachineryNo ratings yet
- Windows Enterprise Client Boot and Logon OptimizationDocument42 pagesWindows Enterprise Client Boot and Logon Optimizationntd2521998100% (1)
- 808DonPC Booklet PDFDocument218 pages808DonPC Booklet PDFEduardo PutzNo ratings yet
- A Checklist For Preventing Common But Deadly MySQL® ProblemsDocument13 pagesA Checklist For Preventing Common But Deadly MySQL® ProblemspavanlondonNo ratings yet
- HP Pavilion Dm1 H210ua1 HPMH 40gab6000-C000Document28 pagesHP Pavilion Dm1 H210ua1 HPMH 40gab6000-C000Marvin Gomez EspinoNo ratings yet
- Five Tone ProgrammingDocument23 pagesFive Tone ProgrammingBuchari Abdillah Andries100% (1)
- 8bit Microprocessor Using VHDLDocument16 pages8bit Microprocessor Using VHDLTanu Newar0% (2)
- Simatic Et 200SPDocument10 pagesSimatic Et 200SPmax2007No ratings yet
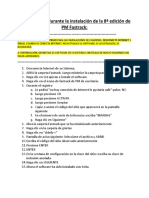
- How To Install Rita 8 Exam SoftwareDocument2 pagesHow To Install Rita 8 Exam SoftwareAlejandroB.CoaguilaNo ratings yet
- Introduction to Computer Systems and Operating SystemsDocument11 pagesIntroduction to Computer Systems and Operating SystemsOmeth SanchithaNo ratings yet
- Installing Gempack Release 11 On Windows PCS: (Chapter 2 of Gempack Manual)Document15 pagesInstalling Gempack Release 11 On Windows PCS: (Chapter 2 of Gempack Manual)Fritz D P HasugianNo ratings yet
- 55 DVSTDocument25 pages55 DVSTPavelNo ratings yet
- Haas VF3 vs. Doosan DNM 5700: APT Machine ToolsDocument31 pagesHaas VF3 vs. Doosan DNM 5700: APT Machine ToolsÇağlar TokelNo ratings yet
- Installation Manual For Peugeot PlanetDocument11 pagesInstallation Manual For Peugeot PlanetJibrin Mj100% (1)
- Digital Axle Counter PDFDocument115 pagesDigital Axle Counter PDFKavin adithyanNo ratings yet
- ABB Price Book 524Document1 pageABB Price Book 524EliasNo ratings yet
- CompTIA A+ Study NotesDocument188 pagesCompTIA A+ Study NotesKu Abhi100% (1)
- Operator E-Jets News Rel 018Document12 pagesOperator E-Jets News Rel 018jivomirNo ratings yet