You might also like
- Aditya Engineering College (A) Aditya Engineering College (A)Document125 pagesAditya Engineering College (A) Aditya Engineering College (A)pavanik27No ratings yet
- Aditya Engineering College (A) Aditya Engineering College (A)Document76 pagesAditya Engineering College (A) Aditya Engineering College (A)pavanik27No ratings yet
- Aditya Engineering College (A) Aditya Engineering College (A)Document51 pagesAditya Engineering College (A) Aditya Engineering College (A)pavanik27No ratings yet
- Praveen Meduri ResumeDocument5 pagesPraveen Meduri ResumePraveen MeduriNo ratings yet
- Technical Support Engineer CVDocument3 pagesTechnical Support Engineer CVKhalid AwanNo ratings yet
- Electronic Devices: Batch 07, Fall 2009 Operational AmplifiersDocument26 pagesElectronic Devices: Batch 07, Fall 2009 Operational AmplifiersGhulam AbbasNo ratings yet
- Cpa102-Lab ReportDocument8 pagesCpa102-Lab ReportEsona Rachelyn P.No ratings yet
- Abhinav Resume PDFDocument2 pagesAbhinav Resume PDFAnurag PrabhakarNo ratings yet
- E3 238 Analog VLSI Circuits: Lecture 1: IntroductionDocument12 pagesE3 238 Analog VLSI Circuits: Lecture 1: IntroductionaxiomNo ratings yet
- First Course Handout EE610ADocument1 pageFirst Course Handout EE610AAayush GodaraNo ratings yet
- Javeed Khan CVDocument7 pagesJaveed Khan CVapi-281983897No ratings yet
- CV #2 Abhinav Agarwal For IntelDocument2 pagesCV #2 Abhinav Agarwal For Intelsatbirsingh123No ratings yet
- EIT IDC Electrical SubstationDocument36 pagesEIT IDC Electrical SubstationaxartechNo ratings yet
- Resume Tyler ArcherDocument1 pageResume Tyler Archerapi-396281379No ratings yet
- ELEN3001 Power System Analysis Semester 1 2016 Bentley Campus INTDocument8 pagesELEN3001 Power System Analysis Semester 1 2016 Bentley Campus INTJeff JabeNo ratings yet
- CV AdityaDocument3 pagesCV Adityaratna sinhaNo ratings yet
- Electrical Dept 2019-20Document22 pagesElectrical Dept 2019-20Qazi Yasir AzamNo ratings yet
- EE4503 Power Engineering Design - OBTLDocument6 pagesEE4503 Power Engineering Design - OBTLAaron Tan100% (1)
- Electronic Technology: Career Options Curriculum California Electrician Certification TrainingDocument3 pagesElectronic Technology: Career Options Curriculum California Electrician Certification TrainingKevin LaiNo ratings yet
- Altera Workshop 27&28feb2014Document2 pagesAltera Workshop 27&28feb2014crsarinNo ratings yet
- Foundation University Prospectus 2012Document180 pagesFoundation University Prospectus 2012asif712100% (1)
- Custom Ic Design: Cmos Standard Cell Circuit Design, Simulation and LayoutDocument19 pagesCustom Ic Design: Cmos Standard Cell Circuit Design, Simulation and Layoutkajal awasthiNo ratings yet
- Zero Crossing Detector: Prepared With The Contribution ofDocument26 pagesZero Crossing Detector: Prepared With The Contribution ofxyzNo ratings yet
- Eee433 Fa09 AicDocument2 pagesEee433 Fa09 AicShanmukh SudheendraNo ratings yet
- Eee 2002 Lecture Notes PDFDocument148 pagesEee 2002 Lecture Notes PDFSatadru DasNo ratings yet
- High Speed Digital Design: Design of High Speed Interconnects and SignalingFrom EverandHigh Speed Digital Design: Design of High Speed Interconnects and SignalingNo ratings yet
- Electronic Device and Circuits Two Marks - V+ Blog - Education News and Study MaterialsDocument9 pagesElectronic Device and Circuits Two Marks - V+ Blog - Education News and Study MaterialsNeha AnisNo ratings yet
- Basic Electronics: Department of Electrical EngineeringDocument39 pagesBasic Electronics: Department of Electrical EngineeringHanhoaiNguyenNo ratings yet
- ECE 525: Power Systems Protection and Relaying: Summer 2019 (Recorded Fall 2018)Document3 pagesECE 525: Power Systems Protection and Relaying: Summer 2019 (Recorded Fall 2018)ViralBipinchandraRathodNo ratings yet
- Lab2 Shanawar - 214241Document7 pagesLab2 Shanawar - 214241Shanawar AliNo ratings yet
- ELEC5402 Digital Integrated Circuit Design 2010Document4 pagesELEC5402 Digital Integrated Circuit Design 2010tssandeepkumarchoudhary@scribd0% (1)
- ACharan ReddyDocument1 pageACharan ReddyPragya shuklaNo ratings yet
- Electrical Engineering: SBC: TechDocument5 pagesElectrical Engineering: SBC: TechGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Pavan Singh Tomar, PHD: ObjectiveDocument3 pagesPavan Singh Tomar, PHD: ObjectivePAVAN SINGH TOMARNo ratings yet
- Coasting & EstimatingSyllDocument13 pagesCoasting & EstimatingSylldamrudharbareth25No ratings yet
- Curriculum Vitae Arpit Srivastava PDFDocument3 pagesCurriculum Vitae Arpit Srivastava PDFMukesh Kumar DewraNo ratings yet
- Ece 1071 OP AMPDocument97 pagesEce 1071 OP AMPaarshia.verma2005No ratings yet
- Engineer Technician Electronics Design in Portland Oregon Resume Gary SailerDocument3 pagesEngineer Technician Electronics Design in Portland Oregon Resume Gary SailerGarySailer2No ratings yet
- ResumeDocument4 pagesResumeapi-19608934No ratings yet
- EEWP ManualDocument88 pagesEEWP Manualsuresh krishnan100% (1)
- ETAP PowerLab 2012 Rev 9Document2 pagesETAP PowerLab 2012 Rev 9Engr Rab Nawaz ButtNo ratings yet
- SYBTechCurriculum SYLLABUSDocument45 pagesSYBTechCurriculum SYLLABUSPRABHAT KUMARNo ratings yet
- Saloni Rana ResumeDocument3 pagesSaloni Rana ResumeArtis HashNo ratings yet
- MANIK OBEROI (11104032) : InternshipDocument7 pagesMANIK OBEROI (11104032) : Internshipvikram_bansal_5No ratings yet
- Embedded Systems Lab ManualDocument48 pagesEmbedded Systems Lab ManualDhanya BhindhyaNo ratings yet
- DR Asad Abidi - June Workshop FlyerDocument2 pagesDR Asad Abidi - June Workshop Flyerahmadusman123No ratings yet
- Usim ProjectDocument41 pagesUsim ProjectchibuikeNo ratings yet
- B.E-Electrical & Electronics Engineering About The DepartmentDocument4 pagesB.E-Electrical & Electronics Engineering About The DepartmentmuralieseaNo ratings yet
- Proteus ISIS: Circuit Simulation UsingDocument18 pagesProteus ISIS: Circuit Simulation UsingزهديابوانسNo ratings yet
- Introduction To Industrial Automation, A Multi-Disciplinary Course at Western Kentucky UniversityDocument8 pagesIntroduction To Industrial Automation, A Multi-Disciplinary Course at Western Kentucky UniversityMedab Abd El MalekNo ratings yet
- Project Synopsis Final GHH 2Document4 pagesProject Synopsis Final GHH 2Ayush RanjanNo ratings yet
- SVCE Sriperumbudur EEE ME PED Admission BroucherDocument2 pagesSVCE Sriperumbudur EEE ME PED Admission BroucherGOPINATH C EEENo ratings yet
- EceDocument67 pagesEceaditya_pundirNo ratings yet
- DDHDLDocument68 pagesDDHDLManoj VarmaNo ratings yet
- Resume LiamlDocument1 pageResume Liamlapi-608920977No ratings yet
- Electrical&Computer Engin (ECE)Document9 pagesElectrical&Computer Engin (ECE)Saad MuftahNo ratings yet
- Modeling and Control of Power Electronics Converter System for Power Quality ImprovementsFrom EverandModeling and Control of Power Electronics Converter System for Power Quality ImprovementsRating: 5 out of 5 stars5/5 (1)
- Power System Small Signal Stability Analysis and ControlFrom EverandPower System Small Signal Stability Analysis and ControlRating: 5 out of 5 stars5/5 (2)
- Probability and Random Processes: With Applications to Signal Processing and CommunicationsFrom EverandProbability and Random Processes: With Applications to Signal Processing and CommunicationsRating: 4 out of 5 stars4/5 (1)
- A P P E N D I X Powers of Ten and Scientific NotationDocument5 pagesA P P E N D I X Powers of Ten and Scientific NotationAnthony BensonNo ratings yet
- 18 Composition Rules For Photos That ShineDocument20 pages18 Composition Rules For Photos That Shinemahfuzkhan100% (1)
- Bcom (HNRS) Project Final Year University of Calcutta (2018)Document50 pagesBcom (HNRS) Project Final Year University of Calcutta (2018)Balaji100% (1)
- Manuel SYL233 700 EDocument2 pagesManuel SYL233 700 ESiddiqui SarfarazNo ratings yet
- Debate ReportDocument15 pagesDebate Reportapi-435309716No ratings yet
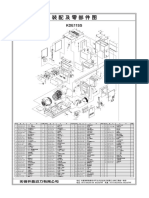
- KDE11SSDocument2 pagesKDE11SSluisgomezpasion1No ratings yet
- Tangerine - Breakfast Set Menu Wef 16 Dec UpdatedDocument3 pagesTangerine - Breakfast Set Menu Wef 16 Dec Updateddeveloper louNo ratings yet
- Information Systems and Supply Chain ManagementDocument2 pagesInformation Systems and Supply Chain Managementvipinkandpal86No ratings yet
- SP-Chapter 14 PresentationDocument83 pagesSP-Chapter 14 PresentationLoiDa FloresNo ratings yet
- Genuine Fakes: How Phony Things Teach Us About Real StuffDocument2 pagesGenuine Fakes: How Phony Things Teach Us About Real StuffGail LeondarWrightNo ratings yet
- Simran's ResumeDocument1 pageSimran's ResumesimranNo ratings yet
- Mfin 7002 Investment Analysis and Portfolio ManagementDocument5 pagesMfin 7002 Investment Analysis and Portfolio ManagementjessieNo ratings yet
- J.K. Brimacombe - Design of Continuous Casting MachinesDocument13 pagesJ.K. Brimacombe - Design of Continuous Casting MachinesJavier GómezNo ratings yet
- Csir Life Sciences Fresh Instant NotesDocument4 pagesCsir Life Sciences Fresh Instant NotesAlps Ana33% (3)
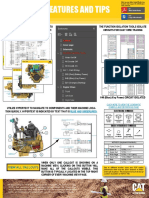
- View All Callouts: Function Isolation ToolsDocument29 pagesView All Callouts: Function Isolation Toolsمهدي شقرونNo ratings yet
- SDSSSSDDocument1 pageSDSSSSDmirfanjpcgmailcomNo ratings yet
- DJ Crypto ResumeDocument1 pageDJ Crypto ResumeNitin MahawarNo ratings yet
- SubaruDocument7 pagesSubaruclaude terizlaNo ratings yet
- AMICO Bar Grating CatalogDocument57 pagesAMICO Bar Grating CatalogAdnanNo ratings yet
- FMEA Minus The PainDocument7 pagesFMEA Minus The PainMUNISNo ratings yet
- Circular ConvolutionDocument3 pagesCircular Convolutionseeksudhanshu1No ratings yet
- Coding Rubric Unifix XXXX 75Document2 pagesCoding Rubric Unifix XXXX 75api-287660266No ratings yet
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocument2 pagesGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiNo ratings yet
- PD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsDocument20 pagesPD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsHazel Jael HernandezNo ratings yet
- DirectionDocument1 pageDirectionJessica BacaniNo ratings yet
- BiografijaDocument36 pagesBiografijaStjepan ŠkalicNo ratings yet
- Studies On Drying Kinetics of Solids in A Rotary DryerDocument6 pagesStudies On Drying Kinetics of Solids in A Rotary DryerVinh Do ThanhNo ratings yet
- PM Jobs Comp Ir RandDocument9 pagesPM Jobs Comp Ir Randandri putrantoNo ratings yet
- AE Notification 2015 NPDCLDocument24 pagesAE Notification 2015 NPDCLSuresh DoosaNo ratings yet
- Perdarahan Uterus AbnormalDocument15 pagesPerdarahan Uterus Abnormalarfiah100% (1)