You might also like
- Escrow AgreementDocument3 pagesEscrow Agreementmadelyn sarmientaNo ratings yet
- Ppe Training NTTFDocument47 pagesPpe Training NTTFAkshatha M100% (1)
- Defender 90 110 Workshop Manual 2Document190 pagesDefender 90 110 Workshop Manual 2Jim Brint100% (1)
- 26-1208-01 Evolution of Silicon-Based Technology in CoatingsDocument10 pages26-1208-01 Evolution of Silicon-Based Technology in Coatingskreci1No ratings yet
- Ziegler-Nichols Tuning Method: Understanding The PID ControllerDocument13 pagesZiegler-Nichols Tuning Method: Understanding The PID ControllerSaran SelvanNo ratings yet
- Qualititative Test of Lipids and Preparation of Carboxylic Acid Salt From LipidsDocument6 pagesQualititative Test of Lipids and Preparation of Carboxylic Acid Salt From LipidsNurul Farhana NasirNo ratings yet
- Shako and BayonetDocument52 pagesShako and Bayonetdoorman46No ratings yet
- Midterms 88%Document18 pagesMidterms 88%jrence80% (5)
- Advances in PID Control: Karl Johan ÅströmDocument51 pagesAdvances in PID Control: Karl Johan ÅströmRaymond Junior MudimisiNo ratings yet
- Solutions and Solubility Practice Hon-18Document3 pagesSolutions and Solubility Practice Hon-18api-368121935No ratings yet
- 8th Sem BE VTU Seminar FormatDocument6 pages8th Sem BE VTU Seminar FormatSourabhAdike80% (15)
- CH 06Document33 pagesCH 06Dan StrutheNo ratings yet
- C-Transient ResponseDocument17 pagesC-Transient ResponseAnanthan SrijithNo ratings yet
- Automatic Control (Part 2) : Frequency Domain AnalysisDocument4 pagesAutomatic Control (Part 2) : Frequency Domain AnalysisjachalfonsiniNo ratings yet
- Lectures 15: Feedback Controller DesignDocument12 pagesLectures 15: Feedback Controller DesignNishant Kumar GuptaNo ratings yet
- A Generalised Harmonic Linearisation Method For Power Converters Input Output Impedance CalculationDocument7 pagesA Generalised Harmonic Linearisation Method For Power Converters Input Output Impedance Calculationthirawad.sNo ratings yet
- BE Project Template Dec 18Document14 pagesBE Project Template Dec 18Vedant JoshiNo ratings yet
- Lec 2 PID ControlDocument8 pagesLec 2 PID ControlAep Kusman HeriyantoNo ratings yet
- Powersys 4Document39 pagesPowersys 4setsindia3735No ratings yet
- Powersys 3Document39 pagesPowersys 3setsindia3735No ratings yet
- A Report: Verilog-A Macromodel For Resistive PotentiometersDocument15 pagesA Report: Verilog-A Macromodel For Resistive PotentiometersDilan ByteNo ratings yet
- State Space Actuator LimitationsDocument10 pagesState Space Actuator LimitationsKevin RussellNo ratings yet
- Microcontroller Based Active and Reactive Power Measurement PDFDocument7 pagesMicrocontroller Based Active and Reactive Power Measurement PDFgeniunetNo ratings yet
- Signal-&-System NoteDocument31 pagesSignal-&-System NotePartha BanerjeeNo ratings yet
- BEV10403 - Week 2 - InductorDocument38 pagesBEV10403 - Week 2 - InductorShafiq NasriNo ratings yet
- Li 2018Document13 pagesLi 2018El ABBADI RedaNo ratings yet
- Chapter 2: Study of Inductive-Capacitive Series Circuits Using The Simulink Software PackageDocument23 pagesChapter 2: Study of Inductive-Capacitive Series Circuits Using The Simulink Software PackageLord KingNo ratings yet
- Mchunu Lindokuhle CO2 Pre-PracDocument10 pagesMchunu Lindokuhle CO2 Pre-PracLungani MthethwaNo ratings yet
- Exp. 4, Part 2: Converter Transfer FunctionsDocument41 pagesExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaNo ratings yet
- Synchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Document5 pagesSynchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Rick MaityNo ratings yet
- Chap 6 Control System I - Web 1Document24 pagesChap 6 Control System I - Web 1吳晨瑋No ratings yet
- Special Topics in Power - 1Document38 pagesSpecial Topics in Power - 1Ravichandran SekarNo ratings yet
- TENCONSpring 2013 6584454Document5 pagesTENCONSpring 2013 6584454Asad HameedNo ratings yet
- EE2020 - M00b - W01 - WI17 (V03)Document168 pagesEE2020 - M00b - W01 - WI17 (V03)Jos Hua MaNo ratings yet
- 10 1002@etep 669Document11 pages10 1002@etep 669dankorankoNo ratings yet
- Physics Exp 3 Lab RepDocument12 pagesPhysics Exp 3 Lab RepNor Iftiha AzizNo ratings yet
- Adaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemDocument9 pagesAdaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemAbdelghani El OugliNo ratings yet
- Current-Sensorless Predictive Control For DC-DC ConvertersDocument6 pagesCurrent-Sensorless Predictive Control For DC-DC ConvertersKannan KochumonNo ratings yet
- Estimating Dynamics of Switching Converters Using System Identification TechniqueDocument8 pagesEstimating Dynamics of Switching Converters Using System Identification TechniqueSmakshi ChoudharyNo ratings yet
- Tac 1971 1099844Document6 pagesTac 1971 1099844Nabila Aulia RamadhaniNo ratings yet
- Mathematical Modeling 1Document68 pagesMathematical Modeling 1hermelaNo ratings yet
- MIE346 - Tutorial Problems 1 - Transfer Functions, Frequency Domain Analysis, Bode Plots, FiltersDocument148 pagesMIE346 - Tutorial Problems 1 - Transfer Functions, Frequency Domain Analysis, Bode Plots, FiltersSara GaoNo ratings yet
- Department of Electrical Engineering: M.B.M Engineering College, JodhpurDocument16 pagesDepartment of Electrical Engineering: M.B.M Engineering College, JodhpurPawan KhatnawaliaNo ratings yet
- Chapter 1 - v4Document29 pagesChapter 1 - v4方包No ratings yet
- Ze050202290236 1Document9 pagesZe050202290236 1abhishek tiwariNo ratings yet
- CHAPTER 1: Plant Process Characterization and PID: TheoryDocument10 pagesCHAPTER 1: Plant Process Characterization and PID: Theorynttu53No ratings yet
- Small Signal Transfer Functions and Mathematical Model of The Boost Power ConverterDocument6 pagesSmall Signal Transfer Functions and Mathematical Model of The Boost Power ConverterNtokozo HlatshwayoNo ratings yet
- Homework 1 ConverterDocument4 pagesHomework 1 ConverterGuilherme E Tamira Lopez0% (3)
- Adaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemDocument9 pagesAdaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemIAES IJPEDSNo ratings yet
- Part Ii 2019-1Document52 pagesPart Ii 2019-1yilunzhangNo ratings yet
- Control in LabVIEW PDFDocument104 pagesControl in LabVIEW PDFJuan PabloNo ratings yet
- 1ET1040506 Sensors and Transducers Open ElectiveDocument2 pages1ET1040506 Sensors and Transducers Open ElectivePatel SarkarNo ratings yet
- Lesson 5: Mathematical Models of Electrical Control System ComponentsDocument15 pagesLesson 5: Mathematical Models of Electrical Control System ComponentsHasan AljabaliNo ratings yet
- PSD W07S01 Z Transform 3Document63 pagesPSD W07S01 Z Transform 3Jimmi NadapdapNo ratings yet
- Harmonic Effects Caused by Large Scale PV InstallaDocument7 pagesHarmonic Effects Caused by Large Scale PV InstallaMUHAMAD ZAHIDNo ratings yet
- Feedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsSuyash Dahake VlogsNo ratings yet
- Week 7 - Control System Part 2Document33 pagesWeek 7 - Control System Part 2Amar MursyidNo ratings yet
- System Modeling: 1 Chapter 2ADocument16 pagesSystem Modeling: 1 Chapter 2Aيوسف الأحمديNo ratings yet
- System Modeling: 1 Chapter 2ADocument16 pagesSystem Modeling: 1 Chapter 2Aيوسف الأحمديNo ratings yet
- Introduction To Sensors: Or, How The World Gets Into Our ProgramsDocument38 pagesIntroduction To Sensors: Or, How The World Gets Into Our ProgramsAjay BabuNo ratings yet
- I. Mathematical Models: Controller SensorDocument19 pagesI. Mathematical Models: Controller SensorKelvin KongNo ratings yet
- Mcs Unit 2.1 PDFDocument59 pagesMcs Unit 2.1 PDFBhargav PraneethNo ratings yet
- Symmetry: Controller For The Grid-Connected Microinverter Output Current TrackingDocument13 pagesSymmetry: Controller For The Grid-Connected Microinverter Output Current TrackingAhmar Hayat KhanNo ratings yet
- Ze050202290236 1Document9 pagesZe050202290236 1138 GowriNo ratings yet
- DC Component (Average Value) and AC Component: Rectiers and Voltage Regulating FiltersDocument10 pagesDC Component (Average Value) and AC Component: Rectiers and Voltage Regulating Filters123juanreyesNo ratings yet
- Experiment 110 Kirchhoff's Laws: Group Leader: Group Number: Group MembersDocument6 pagesExperiment 110 Kirchhoff's Laws: Group Leader: Group Number: Group MembersJuan Emmanuel EspinoNo ratings yet
- IT1251 Information Coding TechniquesDocument23 pagesIT1251 Information Coding TechniquesstudentscornersNo ratings yet
- TErmination Letter-ContractorDocument1 pageTErmination Letter-ContractorBojoNo ratings yet
- SLGR 20121Document27 pagesSLGR 20121Marieta AlejoNo ratings yet
- Vis DK 25 Programming GuideDocument210 pagesVis DK 25 Programming GuideshrihnNo ratings yet
- 100 Patient NamesDocument1 page100 Patient NamesTed anadiloNo ratings yet
- Crimping Tool Explanation and Practical Use ExampleDocument2 pagesCrimping Tool Explanation and Practical Use Examplewinbenitez123No ratings yet
- Herniated Nucleus PulposusDocument12 pagesHerniated Nucleus PulposusshezarNo ratings yet
- Information TechnologyDocument7 pagesInformation TechnologyDEVANAND ANo ratings yet
- It Didn't Snow On Saturday. It Rained On SaturdayDocument1 pageIt Didn't Snow On Saturday. It Rained On SaturdayAnna Talhammer100% (1)
- CS687 - Access Control 1 - Spring 2020Document41 pagesCS687 - Access Control 1 - Spring 2020Dawit GetchoNo ratings yet
- Commonly Asked Interview Questions Co Op Version NEWDocument2 pagesCommonly Asked Interview Questions Co Op Version NEWGail T. BorromeoNo ratings yet
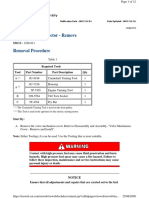
- Electronic Unit Injector - Remove: C6.6 Industrial EngineDocument12 pagesElectronic Unit Injector - Remove: C6.6 Industrial EngineBassieNo ratings yet
- Finite Element Analysis of Suction Penetration Seepage Field of Bucket Foundation Platform With Application To Offshore Oilfield DevelopmentDocument9 pagesFinite Element Analysis of Suction Penetration Seepage Field of Bucket Foundation Platform With Application To Offshore Oilfield DevelopmentRayodcNo ratings yet
- Carob (Ceratonia Siliqua) : Synonyms / Common Names / Related TermsDocument7 pagesCarob (Ceratonia Siliqua) : Synonyms / Common Names / Related TermsMonica BotaNo ratings yet
- Cambridge International AS & A Level: Mathematics 9709/63Document16 pagesCambridge International AS & A Level: Mathematics 9709/63Aiotha SatryaNo ratings yet
- Kuliah 02 - Pengolahan Citra Digital Sampling Quantization 2Document18 pagesKuliah 02 - Pengolahan Citra Digital Sampling Quantization 2Zulkifli Nagh BalitanNo ratings yet
- Dif Conrete Tension (Malvar)Document5 pagesDif Conrete Tension (Malvar)mohamed_gmal22No ratings yet
- Irfan Byna Nur Akbar MT PresentationDocument14 pagesIrfan Byna Nur Akbar MT PresentationirfanNo ratings yet
- SPM Practice June 29Document7 pagesSPM Practice June 29Isabel GohNo ratings yet
- Effects of New Normal Education To Senior High Students of San Roque National High School RESEARCH GROUP 2 2Document11 pagesEffects of New Normal Education To Senior High Students of San Roque National High School RESEARCH GROUP 2 2Elle MontefalcoNo ratings yet
- Monet Brooks CV PDFDocument2 pagesMonet Brooks CV PDFMonet BrooksNo ratings yet