You might also like
- John Deere 310K Service ManualDocument723 pagesJohn Deere 310K Service ManualSergio100% (8)
- Double Benching How To Guide: Steps Key ActionsDocument2 pagesDouble Benching How To Guide: Steps Key ActionsIcyjove icyjove100% (3)
- A Comparative Study On He Performance of Multiphase FlowDocument12 pagesA Comparative Study On He Performance of Multiphase Flowfranciani goedertNo ratings yet
- Roland G-70 Service ManualDocument89 pagesRoland G-70 Service ManualBigg Dady100% (2)
- Olympic Car RentalDocument13 pagesOlympic Car RentalAnirudh RaghavNo ratings yet
- L7 DetectionDocument54 pagesL7 DetectionAgha KazimNo ratings yet
- Linear Programming: Transportation, Assignment, and Transshipment ProblemsDocument14 pagesLinear Programming: Transportation, Assignment, and Transshipment ProblemsahmedelebyaryNo ratings yet
- Robust Geographic Routing and Location-Based Services: Ahmed HelmyDocument56 pagesRobust Geographic Routing and Location-Based Services: Ahmed HelmyManimehalai1No ratings yet
- Fast R-CNN (2015) - GirshickDocument9 pagesFast R-CNN (2015) - GirshickBartoszSowulNo ratings yet
- FluentDocument30 pagesFluentijaz fazilNo ratings yet
- DSD Chapter 5Document89 pagesDSD Chapter 5Hamza JavedNo ratings yet
- SDN & NFV IntroductionDocument72 pagesSDN & NFV Introductionmahmoud_shukur1447No ratings yet
- Distance Vector Routing Algorithm - ExampleDocument21 pagesDistance Vector Routing Algorithm - Examplevenkyvenky7674886497No ratings yet
- R-FCN: Object Detection Via Region-Based Fully Convolutional NetworksDocument11 pagesR-FCN: Object Detection Via Region-Based Fully Convolutional NetworksujnzaqNo ratings yet
- Visualization and Understanding CnnsDocument27 pagesVisualization and Understanding CnnsaliNo ratings yet
- 4b 2d Mobile Bed Hydraulic ModelingDocument51 pages4b 2d Mobile Bed Hydraulic ModelingSvsd PrasadNo ratings yet
- Module10 RipDocument36 pagesModule10 Rippaulas2014No ratings yet
- MICROWINDDocument51 pagesMICROWINDAbhimanyu YadavNo ratings yet
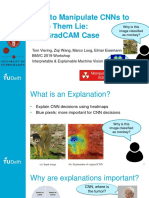
- How To Manipulate CNNs To Make Them Lie: The GradCAM Case (Slides)Document23 pagesHow To Manipulate CNNs To Make Them Lie: The GradCAM Case (Slides)Tom VieringNo ratings yet
- Demystfying Container Networking2 190915040315Document82 pagesDemystfying Container Networking2 190915040315vamsiram99No ratings yet
- Table of Pavement Design ValuesDocument12 pagesTable of Pavement Design ValuesCity AspireNo ratings yet
- Modeling Toolset: Operations ResearchDocument57 pagesModeling Toolset: Operations ResearchHassan KhanNo ratings yet
- Enterprise Data Center EVPN-VXLAN ArchitectureDocument60 pagesEnterprise Data Center EVPN-VXLAN ArchitectureAqsa ArshadNo ratings yet
- Ciena DWDMDocument143 pagesCiena DWDMVictor HugoNo ratings yet
- Introduction To Massive MIMODocument33 pagesIntroduction To Massive MIMOturi313No ratings yet
- Lab 1: To Generate Layout For CMOS Inverter Circuit and Simulate It For VerificationDocument51 pagesLab 1: To Generate Layout For CMOS Inverter Circuit and Simulate It For VerificationAbdullah Al Mamun MojumderNo ratings yet
- ECE 5391/6331, Fall, 2021: Wireless CommunicationDocument23 pagesECE 5391/6331, Fall, 2021: Wireless CommunicationtomNo ratings yet
- Correct-by-Construction Navigation Functions With Application To Sensor Based Robot NavigationDocument8 pagesCorrect-by-Construction Navigation Functions With Application To Sensor Based Robot NavigationelectroetinfoNo ratings yet
- Gis Operation ManualDocument17 pagesGis Operation ManualDavid DuranNo ratings yet
- High-Performance Hardware For Machine Learning - 0916Document68 pagesHigh-Performance Hardware For Machine Learning - 0916Bill PetrieNo ratings yet
- Introduction To Mobile Robotics: Path Planning and Collision AvoidanceDocument56 pagesIntroduction To Mobile Robotics: Path Planning and Collision Avoidanceshyam SaravananNo ratings yet
- NFV Management and OrchestrationDocument14 pagesNFV Management and OrchestrationMasood SabriNo ratings yet
- Ker As TutorialDocument33 pagesKer As TutorialYoann DragneelNo ratings yet
- Anand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DDocument12 pagesAnand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DAashishNo ratings yet
- 3.distance Vector RoutingDocument38 pages3.distance Vector RoutingDivya K.SNo ratings yet
- Kubernetes Networking Intro & Deep DiveDocument44 pagesKubernetes Networking Intro & Deep DiveKannan VanniarajanNo ratings yet
- Module 3Document26 pagesModule 3PALLAVI RNo ratings yet
- VT Inspect With BorescopeDocument54 pagesVT Inspect With BorescopeDodi SuhendraNo ratings yet
- Week # 03Document25 pagesWeek # 03khanlmnoNo ratings yet
- Fast and Parallel Algorithms For Multiple-Scattering ImagingDocument43 pagesFast and Parallel Algorithms For Multiple-Scattering ImagingAnasya BabySpaNo ratings yet
- CSE390 - Advanced Computer Networks: Lecture 22: Software Designed NetworkingDocument51 pagesCSE390 - Advanced Computer Networks: Lecture 22: Software Designed NetworkingPilar AlessandraNo ratings yet
- ROS-I Basic Developers Training - Session 4Document40 pagesROS-I Basic Developers Training - Session 4JohnNo ratings yet
- Computer Networks: Network LayerDocument71 pagesComputer Networks: Network LayerRiajiminNo ratings yet
- OpenSees Future Direction 2017Document39 pagesOpenSees Future Direction 2017fariasgarciarojasNo ratings yet
- Chapter - 5 - V7.01 - Part 1Document30 pagesChapter - 5 - V7.01 - Part 1Rao UsamaNo ratings yet
- Module 5 The Network Layer - Control PlaneDocument48 pagesModule 5 The Network Layer - Control PlaneBeast IncarnateNo ratings yet
- Convolutional Neural Networks (1) : Geena KimDocument28 pagesConvolutional Neural Networks (1) : Geena KimHuston LAMNo ratings yet
- SDWAN Throughput Performance Benchmark 1 9Document11 pagesSDWAN Throughput Performance Benchmark 1 9Christian DanielNo ratings yet
- Mobile Adhoc+NetworkDocument157 pagesMobile Adhoc+NetworkSourav SinhaNo ratings yet
- RTL Design Slides PDFDocument89 pagesRTL Design Slides PDFusama nawazNo ratings yet
- Calculation and Visualization of Public Transport Travel Time Maps With Html5 Canvas and JavascriptDocument34 pagesCalculation and Visualization of Public Transport Travel Time Maps With Html5 Canvas and JavascriptstefanwehrmeyerNo ratings yet
- WD13 Diop PDFDocument7 pagesWD13 Diop PDFMamour DiopNo ratings yet
- L09-10 DL and CNNDocument56 pagesL09-10 DL and CNNPaulo SantosNo ratings yet
- MAE 598 Intro To Autonomous Project Dhiram Omkar HarshalDocument14 pagesMAE 598 Intro To Autonomous Project Dhiram Omkar HarshalVision VedantNo ratings yet
- Nokia-ORAN IntroDocument20 pagesNokia-ORAN IntroMohamed Abd-ElsalamNo ratings yet
- CMG软件培训讲义 (三) BuilderDocument46 pagesCMG软件培训讲义 (三) BuilderjalestNo ratings yet
- FusionCompute V100R005C00 Network VirtualizationDocument66 pagesFusionCompute V100R005C00 Network VirtualizationAlexNo ratings yet
- Network Layer: The Control Plane: Computer Networking: A Top Down ApproachDocument64 pagesNetwork Layer: The Control Plane: Computer Networking: A Top Down ApproachPoornima MadubhashiniNo ratings yet
- Blackjack: Military Space Pivot To LEODocument9 pagesBlackjack: Military Space Pivot To LEOAnkitNo ratings yet
- Pointshop 3D: An Interactive System For Point-Based Surface EditingDocument29 pagesPointshop 3D: An Interactive System For Point-Based Surface EditingVinicius PaulinoNo ratings yet
- LEAPFROG - PTFI Leapfrog Geo ImplementationDocument18 pagesLEAPFROG - PTFI Leapfrog Geo ImplementationFaiz AkpNo ratings yet
- CN CH 5Document48 pagesCN CH 5محمد محمدNo ratings yet
- 21 MobileDocument15 pages21 Mobileapi-3717234No ratings yet
- Weak Convergence of Measures: Probability and Mathematical Statistics: A Series of Monographs and TextbooksFrom EverandWeak Convergence of Measures: Probability and Mathematical Statistics: A Series of Monographs and TextbooksNo ratings yet
- Measure and Integration: A Concise Introduction to Real AnalysisFrom EverandMeasure and Integration: A Concise Introduction to Real AnalysisNo ratings yet
- GenMath Q2 W 1 825 PagesDocument25 pagesGenMath Q2 W 1 825 PagesMarylyn MirandaNo ratings yet
- Cost Management in PM CoursesDocument167 pagesCost Management in PM CoursesJM DunandNo ratings yet
- Ï'mdgm ('H$ A ''Z: Note: All Questions From Section A' Are To Be AttemptedDocument6 pagesÏ'mdgm ('H$ A ''Z: Note: All Questions From Section A' Are To Be AttemptedAmit VermaNo ratings yet
- Macam Vs GatmaitanDocument4 pagesMacam Vs GatmaitanIvan Montealegre Conchas100% (1)
- Assignment No. 1: TitleDocument2 pagesAssignment No. 1: TitlePranav Mhatre100% (1)
- Domino's PizzaDocument37 pagesDomino's PizzaAristianto Pradana0% (3)
- Cougar DesignDocument25 pagesCougar DesignNewsie IvmNo ratings yet
- How To Edit A PanelView Plus (ViewME) MER FileDocument6 pagesHow To Edit A PanelView Plus (ViewME) MER FileRafael Pertile CarneiroNo ratings yet
- Iso-Iec Guides PDFDocument2 pagesIso-Iec Guides PDFAlex VargasNo ratings yet
- Metaris Vane ProductsDocument20 pagesMetaris Vane ProductsFernanda DomecgNo ratings yet
- Comfort Control PrinciplesDocument45 pagesComfort Control PrinciplesThanh ThuanNo ratings yet
- W9 Lesson 7 Introduction To MySQL - PresentationDocument29 pagesW9 Lesson 7 Introduction To MySQL - PresentationWendellNo ratings yet
- Iot Applications: John Soldatos, PHD ( )Document48 pagesIot Applications: John Soldatos, PHD ( )Muhammad AwaisNo ratings yet
- Final Report Artificial Intelligence in Civil Engineering (8257)Document45 pagesFinal Report Artificial Intelligence in Civil Engineering (8257)050 Syed EhsaanNo ratings yet
- Octave ManualDocument240 pagesOctave Manualcmtinv100% (1)
- Intermediate Acctg 3 NotesDocument6 pagesIntermediate Acctg 3 NotesCindy The GoddessNo ratings yet
- MazaCAM InfoDocument3 pagesMazaCAM InfodavoudyNo ratings yet
- Quiz Theory AccountingDocument8 pagesQuiz Theory Accountingjucia wantaNo ratings yet
- CH HP OverviewDocument44 pagesCH HP Overviewprabhanshu241991No ratings yet
- Maths Worksheet - LoansDocument3 pagesMaths Worksheet - LoansCape Town After-School TutorialsNo ratings yet
- AF617 Syl Update 6.25.11Document3 pagesAF617 Syl Update 6.25.11落海无潮No ratings yet
- Tahir Khalil Meo: Advocate High Court Cell # 0300-8356444 Office # 80, Block A, Judicial Complex Pattoki, KasurDocument4 pagesTahir Khalil Meo: Advocate High Court Cell # 0300-8356444 Office # 80, Block A, Judicial Complex Pattoki, KasurZahoorNabiNo ratings yet
- Philippine Brands Going International by Philippine Franchise AssociationDocument31 pagesPhilippine Brands Going International by Philippine Franchise AssociationNoni100% (1)
- For Details, Click On:: Hr-India@giz - deDocument3 pagesFor Details, Click On:: Hr-India@giz - deshruti hurmadeNo ratings yet
- Small Porch SwingDocument26 pagesSmall Porch SwingEngr Saad Bin SarfrazNo ratings yet