You might also like
- Digital Control Systems FundamentalsDocument18 pagesDigital Control Systems Fundamentalscipet imphal100% (1)
- EP 5511 - Lecture 01Document29 pagesEP 5511 - Lecture 01Solomon Tadesse AthlawNo ratings yet
- Digital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341Document33 pagesDigital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341محمد القدوميNo ratings yet
- Pertemuan Ke 13 Akusisi DataDocument117 pagesPertemuan Ke 13 Akusisi DataKautsar KuzaNo ratings yet
- DAQDocument34 pagesDAQKhairul FahzanNo ratings yet
- Bel - 16 - ADC and DACDocument26 pagesBel - 16 - ADC and DACBharavi K SNo ratings yet
- Introduction to Digital Control SystemsDocument70 pagesIntroduction to Digital Control SystemsAmruth Thelkar67% (3)
- Chapter 6Document42 pagesChapter 6Henry MaedaNo ratings yet
- Medical Signal Processing (BM321) Report 1: Configuration of A DSP System Homework 1Document15 pagesMedical Signal Processing (BM321) Report 1: Configuration of A DSP System Homework 1Batool HerzallahNo ratings yet
- Cmpe 30094 Logic Circuits and Design Instructional Materials Version 2.02Document183 pagesCmpe 30094 Logic Circuits and Design Instructional Materials Version 2.02cyber4815No ratings yet
- Chapter 2 Discrete Data Control SystemsDocument78 pagesChapter 2 Discrete Data Control SystemsAmruth ThelkarNo ratings yet
- Introduction To Digital Control SystemDocument20 pagesIntroduction To Digital Control SystemApril SurNo ratings yet
- 2 Data Acquisition SystemsDocument38 pages2 Data Acquisition SystemsumarsaboNo ratings yet
- Unit 4Document13 pagesUnit 4youaremine.696969No ratings yet
- GROUP4Document59 pagesGROUP4Ian Harvey Mendoza100% (1)
- Signal Processing in Digital ControlDocument40 pagesSignal Processing in Digital ControlSaiRoopa GaliveetiNo ratings yet
- Study of Various ADCs and Compare Their Performance and ParametersDocument12 pagesStudy of Various ADCs and Compare Their Performance and ParametersijaertNo ratings yet
- Intro to Digital ConceptsDocument6 pagesIntro to Digital ConceptsredunikornNo ratings yet
- Signal Processing Elements and SoftwareDocument21 pagesSignal Processing Elements and SoftwareArtono Dwijo SutomoNo ratings yet
- Analog To Digital ConvertersDocument11 pagesAnalog To Digital Convertersمحمد ماجدNo ratings yet
- Advanced Digital Control Syst EE554Document31 pagesAdvanced Digital Control Syst EE554Abdullah AloglaNo ratings yet
- Trabajo Investigacion DSP N1Document10 pagesTrabajo Investigacion DSP N1Sanchez OscarNo ratings yet
- ELG3336 Design of Mechatronics SystemDocument19 pagesELG3336 Design of Mechatronics SystemNive SBNo ratings yet
- Me 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesDocument13 pagesMe 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesSenthil KumarNo ratings yet
- Lecture 3 - 2022 - FinalDocument67 pagesLecture 3 - 2022 - FinalFrancis LubangoNo ratings yet
- Analog-to-Digital-Convesion v2 - StudentDocument43 pagesAnalog-to-Digital-Convesion v2 - StudentJysh MamusogNo ratings yet
- ETI 2413 Digital Communication Principles Course OverviewDocument35 pagesETI 2413 Digital Communication Principles Course OverviewKevin NdemoNo ratings yet
- Unit 2 SignalsDocument3 pagesUnit 2 SignalsDigitallogicdlNo ratings yet
- Digital Systems: Introduction to Analog vs. Digital ConceptsDocument16 pagesDigital Systems: Introduction to Analog vs. Digital ConceptsSaadia Tabassum, Lecturer (Electronics)No ratings yet
- EI Assignment 1 PDFDocument6 pagesEI Assignment 1 PDFFirozNo ratings yet
- Digital Signal Processing Mid1Document123 pagesDigital Signal Processing Mid1ANISH HALDERNo ratings yet
- Analog To Digital Converter - Block Diagram, Types Its ApplicationsDocument10 pagesAnalog To Digital Converter - Block Diagram, Types Its ApplicationsNikka Hernandez FloresNo ratings yet
- 9.7 Data Converters-An Introduction: Operational-Amplifier and Data-Converter CircuitsDocument13 pages9.7 Data Converters-An Introduction: Operational-Amplifier and Data-Converter CircuitskawsikNo ratings yet
- berkes_interfacing exp arrangementDocument20 pagesberkes_interfacing exp arrangementAditya K NNo ratings yet
- Iii B.Tech Ii Sem Eie (R18) : Unit - VDocument62 pagesIii B.Tech Ii Sem Eie (R18) : Unit - VSrinivas PapaniNo ratings yet
- Es1107 Assignment-01Document6 pagesEs1107 Assignment-01K. BHANU PRAKASH REDDYNo ratings yet
- Data Acquisition Process ExplainedDocument14 pagesData Acquisition Process ExplainedAditi Saha33% (3)
- Design of Pulse Code Modulation (PCM) in Digital Communication Using MATLAB SimulinkDocument6 pagesDesign of Pulse Code Modulation (PCM) in Digital Communication Using MATLAB Simulinksagar patelNo ratings yet
- Chapter 1Document135 pagesChapter 1Murali ShettyNo ratings yet
- Lecture 12, Intro To Data Aquisition SystemDocument29 pagesLecture 12, Intro To Data Aquisition SystemMuhammadNo ratings yet
- Distributed Control SystemsDocument24 pagesDistributed Control SystemsPraveen Madhusoodhanan100% (1)
- PCI Module 5 PDFDocument35 pagesPCI Module 5 PDFjaya kingNo ratings yet
- Unit 5Document23 pagesUnit 5shreyas shahNo ratings yet
- Chapter 8 Data Acquisition and Feedback Control SystemsDocument64 pagesChapter 8 Data Acquisition and Feedback Control Systemsامجد الغالبيNo ratings yet
- Api 682 PDFDocument26 pagesApi 682 PDFAhmed ElhoniNo ratings yet
- DAC and ADC Guide to Digital-Analog and Analog-Digital ConversionDocument6 pagesDAC and ADC Guide to Digital-Analog and Analog-Digital Conversionvishwanath cNo ratings yet
- Embedded Systems Assignment 5Document5 pagesEmbedded Systems Assignment 5ramrevolt55No ratings yet
- How Analog-To-Digital Converters (ADCs) WorkDocument6 pagesHow Analog-To-Digital Converters (ADCs) Workdiether.gozumNo ratings yet
- Measuring Elements Guide to Indicators, Recorders & DisplaysDocument9 pagesMeasuring Elements Guide to Indicators, Recorders & DisplaysKhairi KKamarNo ratings yet
- Tutorial DAQDocument26 pagesTutorial DAQkirubelNo ratings yet
- Digital Signal Processing: Mustansiriyah University College of Engineering Electrical Engineering Department 4 ClassDocument60 pagesDigital Signal Processing: Mustansiriyah University College of Engineering Electrical Engineering Department 4 ClassPreethi ReddyNo ratings yet
- Cycle 2 Adc 18tel67Document31 pagesCycle 2 Adc 18tel67LitlatohNo ratings yet
- Analog To Digital ConverterDocument14 pagesAnalog To Digital Converterparth bhardwajNo ratings yet
- PCM SignalsDocument16 pagesPCM SignalsStephen AdokwuNo ratings yet
- Digital Communication System: Analog To Digital Conversion Is Carried Out HereDocument37 pagesDigital Communication System: Analog To Digital Conversion Is Carried Out Hereahmed yuosifNo ratings yet
- 16900121194Document4 pages16900121194suvamsarma67No ratings yet
- Basic of PCMDocument15 pagesBasic of PCMPablo TrujilloNo ratings yet
- Discrete Systems Z TransfrmDocument5 pagesDiscrete Systems Z TransfrmAlie FavourNo ratings yet
- Mechatronics - 302050: Lecture Notes / PPT Unit IiiDocument29 pagesMechatronics - 302050: Lecture Notes / PPT Unit IiiRajesh GangwarNo ratings yet
- DCS 4Document64 pagesDCS 4Anna BrookeNo ratings yet
- DCS 5Document22 pagesDCS 5Anna BrookeNo ratings yet
- DCS 3Document22 pagesDCS 3Anna BrookeNo ratings yet
- DCS 2Document20 pagesDCS 2Anna BrookeNo ratings yet
- تودوروف نموذج العلاقة مع الاخرDocument17 pagesتودوروف نموذج العلاقة مع الاخرAnna BrookeNo ratings yet
- CH4 - SS Model - Reduction BD - Signal Flow Graph - Control Theory - 2020-2021 - Semester01 - DR - HoroubDocument144 pagesCH4 - SS Model - Reduction BD - Signal Flow Graph - Control Theory - 2020-2021 - Semester01 - DR - HoroubAnna BrookeNo ratings yet
- CH3 - Mathematical-Model - Control Theory - 2020-2021 - Semester01 - DR - HoroubDocument158 pagesCH3 - Mathematical-Model - Control Theory - 2020-2021 - Semester01 - DR - HoroubAnna BrookeNo ratings yet
- CH3 - Mathematical-Model - Solved at Home - Control Theory - 2020-2021 - Semester01 - DR - HoroubDocument19 pagesCH3 - Mathematical-Model - Solved at Home - Control Theory - 2020-2021 - Semester01 - DR - HoroubAnna BrookeNo ratings yet
- CH2 - Laplace Transform - Control Theory - 2020-2021 - Semester01 - DR - HoroubDocument83 pagesCH2 - Laplace Transform - Control Theory - 2020-2021 - Semester01 - DR - HoroubAnna BrookeNo ratings yet
- CH1 - Control Theory - 2020-2021 - Semester01 - DR - HoroubDocument35 pagesCH1 - Control Theory - 2020-2021 - Semester01 - DR - HoroubAnna BrookeNo ratings yet
- 7 - GEH-6370 MK V Time SynchronizationDocument44 pages7 - GEH-6370 MK V Time SynchronizationBouazzaNo ratings yet
- S08337a PDFDocument137 pagesS08337a PDFJhony KizeNo ratings yet
- Instructions: Electronic Unit For BD35F/50F/35K Compressors, 101N0212, 101N0340 and 101N0650, 12/24V DCDocument2 pagesInstructions: Electronic Unit For BD35F/50F/35K Compressors, 101N0212, 101N0340 and 101N0650, 12/24V DCDong NguyenNo ratings yet
- Convert Thermocouple Milivolts To Temperature Instrumentation and Control EngineeringDocument5 pagesConvert Thermocouple Milivolts To Temperature Instrumentation and Control EngineeringMuhammad Asad Ullah KhanNo ratings yet
- PiC900 HardwareManual en-US Rev13Document508 pagesPiC900 HardwareManual en-US Rev13Ramon MariscalNo ratings yet
- 21 January 2016 Manichudar Tamil Daily E PaperDocument4 pages21 January 2016 Manichudar Tamil Daily E PaperAnonymous wBeEhqCI7No ratings yet
- Helicopter Landing Gear SystemsDocument48 pagesHelicopter Landing Gear SystemsKarthik Bk100% (1)
- Wea012864d 03Document4 pagesWea012864d 03Cătălin-Cristian PetroviciNo ratings yet
- ElectronicMechanic1stSEMTheory (NSQF)Document231 pagesElectronicMechanic1stSEMTheory (NSQF)Super SalesNo ratings yet
- Nominal and Detailed LTE Radio Network Planning for Dhaka CityDocument8 pagesNominal and Detailed LTE Radio Network Planning for Dhaka Cityhmalrizzo469No ratings yet
- Eng 306 - Doc 3 - 2020f - Extra ReadingDocument163 pagesEng 306 - Doc 3 - 2020f - Extra ReadingNguyen Anh TaiNo ratings yet
- Https://en - Wikipedia.org/wiki/weighting FilterDocument6 pagesHttps://en - Wikipedia.org/wiki/weighting FiltervikicacicaNo ratings yet
- Space Segment SubsystemsDocument12 pagesSpace Segment SubsystemsThembelanienkosini ChikhambiNo ratings yet
- LG Electronics India Pvt. Ltd.Document27 pagesLG Electronics India Pvt. Ltd.kamdica0% (1)
- Honeywell 4800i Industrial 2D Area Image ScannerDocument2 pagesHoneywell 4800i Industrial 2D Area Image ScannerJohnny BarcodeNo ratings yet
- Supraharmonics From Power Electronics ConvertersDocument6 pagesSupraharmonics From Power Electronics ConvertersDinu DasNo ratings yet
- 4f27e Book PDFDocument75 pages4f27e Book PDFcorie132100% (1)
- FSG Angular Position Transducers EDocument11 pagesFSG Angular Position Transducers ERachid SmailiNo ratings yet
- Design Type II Compensation in A Systematic Way: Gain and Phase CharacteristicsDocument10 pagesDesign Type II Compensation in A Systematic Way: Gain and Phase CharacteristicsSunilNo ratings yet
- Determine Capacitance of a Capacitor in an AC CircuitDocument22 pagesDetermine Capacitance of a Capacitor in an AC CircuitWanAminudinNo ratings yet
- PowerDocument152 pagesPowerAkshaya kumar mohantyNo ratings yet
- Owner's Manual: Integrated High Definition LCD TelevisionDocument62 pagesOwner's Manual: Integrated High Definition LCD TelevisionManuel MartinezNo ratings yet
- Mathematics For CircuitsDocument103 pagesMathematics For CircuitskhfljkhlfaskdhñniuNo ratings yet
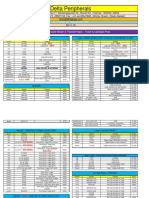
- Printers DeltaperperalDocument4 pagesPrinters DeltaperperalParid RidwanNo ratings yet
- (01 33 23) Shop Drawings, Product Data and SamplesDocument4 pages(01 33 23) Shop Drawings, Product Data and SamplesĐinh Thiện SỹNo ratings yet
- Mixture Formation in SI and CI EnginesDocument82 pagesMixture Formation in SI and CI Enginesahmed jemalNo ratings yet
- Marine SSB Frequencies PDFDocument3 pagesMarine SSB Frequencies PDFJoão Miguel100% (1)
- ISA RP60.6 Nameplates, Labels, and Tags For Control CentersDocument44 pagesISA RP60.6 Nameplates, Labels, and Tags For Control CentersfmnguestNo ratings yet
- Wall Calendar CardsDocument1 pageWall Calendar CardstimsivyNo ratings yet
- User Manual Genisis 5.5-15 KWDocument91 pagesUser Manual Genisis 5.5-15 KWGerry Mc Mahon67% (3)