You might also like
- 2 BoostDocument8 pages2 BoostArian100% (2)
- Azure Data and Ai Architect Handbook Adopt A Structured Approach To Designing Data and Ai Solutions at Scale Team Ira 1803234865 9781803234861 CompressDocument284 pagesAzure Data and Ai Architect Handbook Adopt A Structured Approach To Designing Data and Ai Solutions at Scale Team Ira 1803234865 9781803234861 CompresspascalburumeNo ratings yet
- Drillworks Training SoftwareDocument212 pagesDrillworks Training SoftwareJose Luis Mondragon100% (1)
- The Agile Team: T-Shape Well FunctioningDocument1 pageThe Agile Team: T-Shape Well FunctioningTheone TrukingNo ratings yet
- AI Module3 2 Constraint Satisfaction Problems (1) SRKDocument36 pagesAI Module3 2 Constraint Satisfaction Problems (1) SRKltalluriNo ratings yet
- AI-Module3-2-Constraint Satisfaction ProblemsDocument27 pagesAI-Module3-2-Constraint Satisfaction Problemslosojew161No ratings yet
- Unit IvDocument92 pagesUnit Ivmdsamiurrahaman04No ratings yet
- Lec07 ConstraintsatisfactionDocument46 pagesLec07 ConstraintsatisfactionMD AminNo ratings yet
- Unit 3 CSPDocument32 pagesUnit 3 CSPSharanya EmmadisettyNo ratings yet
- Constraint Satisfaction ProblemsDocument77 pagesConstraint Satisfaction Problemsharshita.sharma.phd23No ratings yet
- Constraint Satisfaction ProblemsDocument10 pagesConstraint Satisfaction Problemsshikhar jainNo ratings yet
- LM24 - Constraint Satisfaction ProblemsDocument20 pagesLM24 - Constraint Satisfaction Problemsjaiisrinivasan2305No ratings yet
- Artificial Intelligence: Constraint Satisfaction ProblemsDocument51 pagesArtificial Intelligence: Constraint Satisfaction Problemssurya kiranNo ratings yet
- Constraint Satisfaction ProblemDocument43 pagesConstraint Satisfaction ProblemLucky Asr AwaisNo ratings yet
- Constraint Satisfaction ProblemsDocument49 pagesConstraint Satisfaction ProblemsPoonam KumariNo ratings yet
- Constraint Satisfaction ProblemDocument10 pagesConstraint Satisfaction ProblemSwapniltrinityNo ratings yet
- Ai Assgnmt FinalDocument13 pagesAi Assgnmt FinalWondu GashahunNo ratings yet
- Ai Assgnmt FinalDocument13 pagesAi Assgnmt FinalWondu GashahunNo ratings yet
- Constraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerDocument17 pagesConstraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerMUHAMMAD ALINo ratings yet
- Chapter 6 - CSPs - Part - 1Document40 pagesChapter 6 - CSPs - Part - 1Osama Al AsoouliNo ratings yet
- AI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningDocument11 pagesAI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningSaranya NarayanasettiNo ratings yet
- Constraint Satisfaction ProblemDocument9 pagesConstraint Satisfaction ProblemswapsjagNo ratings yet
- AI-Lecture 7 (Constraint Satisfaction Problems)Document60 pagesAI-Lecture 7 (Constraint Satisfaction Problems)Yna ForondaNo ratings yet
- 5 CSPDocument70 pages5 CSPGUNEET SURANo ratings yet
- Constraint Satisfaction Problems (CSPs) ExplainedDocument47 pagesConstraint Satisfaction Problems (CSPs) Explainedtrilok4391No ratings yet
- CSP Basic Intro ChessDocument49 pagesCSP Basic Intro Chessapi-27044292No ratings yet
- CSPDocument9 pagesCSPSrinivas VemuriNo ratings yet
- CSP Techniques for Solving Constraint Satisfaction ProblemsDocument40 pagesCSP Techniques for Solving Constraint Satisfaction ProblemsCamilo IsazaNo ratings yet
- Constraint Satisfaction Problems: Unit 3Document28 pagesConstraint Satisfaction Problems: Unit 3youtube channelNo ratings yet
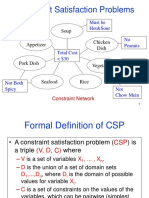
- Constraint Satisfaction Problems: Soup Chicken Dish AppetizerDocument45 pagesConstraint Satisfaction Problems: Soup Chicken Dish AppetizerAyush SethiNo ratings yet
- Constraint Satisfaction Problems (CSPsDocument57 pagesConstraint Satisfaction Problems (CSPsJetlin C PNo ratings yet
- Experiment 6 AIM: - Theory: - : Constraint Satisfaction ProblemDocument4 pagesExperiment 6 AIM: - Theory: - : Constraint Satisfaction ProblemVarun VoraNo ratings yet
- Constraint Programming: Toby Walsh Unsw and NictaDocument62 pagesConstraint Programming: Toby Walsh Unsw and Nictakyle_namgal1679No ratings yet
- Assignment 2Document3 pagesAssignment 2guanlin HeNo ratings yet
- 05 CSPDocument28 pages05 CSPNada ElokabyNo ratings yet
- CS188 AI Introduction Constraint Satisfaction ProblemsDocument10 pagesCS188 AI Introduction Constraint Satisfaction Problemshellosunshine95No ratings yet
- Constraint Satisfaction ProblemsDocument42 pagesConstraint Satisfaction Problemsjiminisinbts02No ratings yet
- Constraint Satisfaction Problems Representation and AlgorithmsDocument5 pagesConstraint Satisfaction Problems Representation and AlgorithmsEloy VegaNo ratings yet
- Solving Constraint Satisfaction ProblemsDocument42 pagesSolving Constraint Satisfaction ProblemsShrikant SaxenaNo ratings yet
- Constraint Satisfaction Problems: Prof. Abbas AL-BakriDocument41 pagesConstraint Satisfaction Problems: Prof. Abbas AL-BakriIhab AmerNo ratings yet
- CSP Solving TechniquesDocument75 pagesCSP Solving Techniquesshruti soniNo ratings yet
- Daa 4.0 DP PDFDocument50 pagesDaa 4.0 DP PDFAbdus SadikNo ratings yet
- A Dynamic Topological Sort Algorithm For Directed Acyclic GraphsDocument24 pagesA Dynamic Topological Sort Algorithm For Directed Acyclic Graphsgallium.09.gleeNo ratings yet
- CS450: Project For 4 Credit Option Due 5 PM Wednesday, December 16, 2015Document2 pagesCS450: Project For 4 Credit Option Due 5 PM Wednesday, December 16, 2015Sandeep Ravikumar MurthyNo ratings yet
- Russell & Norvig Ch. 5: - Constraint Satisfaction Offers A Powerful Problem-Solving ParadigmDocument20 pagesRussell & Norvig Ch. 5: - Constraint Satisfaction Offers A Powerful Problem-Solving ParadigmirinarmNo ratings yet
- PDE Project ReportDocument14 pagesPDE Project ReportKrishan ParwaniNo ratings yet
- Lesson 4.1 - Constraint Satisfaction Problems(2)Document30 pagesLesson 4.1 - Constraint Satisfaction Problems(2)rolexlukeofficialNo ratings yet
- JobshopDocument16 pagesJobshopapi-3774614No ratings yet
- Constraint Satisfaction ProblemDocument37 pagesConstraint Satisfaction Problemniyati1120No ratings yet
- Constraint Satisfaction Problems: Version 2 CSE IIT, KharagpurDocument17 pagesConstraint Satisfaction Problems: Version 2 CSE IIT, KharagpurVanu ShaNo ratings yet
- CSP AIDocument38 pagesCSP AImna shourovNo ratings yet
- Constraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerDocument15 pagesConstraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerMUHAMMAD ALINo ratings yet
- BV Cvxbook Extra ExercisesDocument156 pagesBV Cvxbook Extra ExercisesAnonymous WkbmWCa8MNo ratings yet
- 11.-CSPDocument40 pages11.-CSPSupriya NevewaniNo ratings yet
- Constraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Document55 pagesConstraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Gomathi ShanmugamNo ratings yet
- Constraint Satisfaction Problems (CSP)Document36 pagesConstraint Satisfaction Problems (CSP)ShamsNo ratings yet
- Constraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelDocument55 pagesConstraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelRonaldo PitersonNo ratings yet
- COE 292 Introduction to Artificial Intelligence: Backtracking Search for CSPsDocument110 pagesCOE 292 Introduction to Artificial Intelligence: Backtracking Search for CSPsMohammed AlbazzazNo ratings yet
- Trí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsDocument33 pagesTrí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsVăn Lâm TrầnNo ratings yet
- BV Cvxbook Extra ExercisesDocument139 pagesBV Cvxbook Extra ExercisesAkhil AmritaNo ratings yet
- 5 CSPDocument36 pages5 CSPPratik Pradip SarodeNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Bai Tap Inventor 147 167Document21 pagesBai Tap Inventor 147 167Ngọc Vi CaoNo ratings yet
- Module 1: Introduction To Production ManagementDocument46 pagesModule 1: Introduction To Production ManagementJhen-Jhen Geol-oh BaclasNo ratings yet
- Ananya Lakshmi CSC Project DocumentDocument16 pagesAnanya Lakshmi CSC Project Documentyaazhini.No ratings yet
- Practical Lecture 1: - To Validate Climatic Data of Interpolated Vs Non-InterpolatedDocument42 pagesPractical Lecture 1: - To Validate Climatic Data of Interpolated Vs Non-Interpolatedadnan salikNo ratings yet
- Tutorialspoint Examples: How To Use JSON Object in Java?Document2 pagesTutorialspoint Examples: How To Use JSON Object in Java?Khaliq Dawood BuxNo ratings yet
- ComputerDocument5 pagesComputerParidhi AgrawalNo ratings yet
- Certificate: Inderprastha Engineering College 63, Site - Iv Surya Nagar Flyover Road Sahibabad, GhaziabadDocument45 pagesCertificate: Inderprastha Engineering College 63, Site - Iv Surya Nagar Flyover Road Sahibabad, GhaziabadVèdãñt MíshrãNo ratings yet
- Self IntroductionDocument34 pagesSelf IntroductionatozdhiyanesNo ratings yet
- Sorvall rc12bpDocument68 pagesSorvall rc12bpAngeloNo ratings yet
- How to Mix Secondary Colors in ArtDocument5 pagesHow to Mix Secondary Colors in Artpankaj kararNo ratings yet
- Software Requirement Specification: Stock Maintenance SystemDocument29 pagesSoftware Requirement Specification: Stock Maintenance Systemsathiyan gsNo ratings yet
- Literature Review of Iot Based Plant Watering SystemDocument8 pagesLiterature Review of Iot Based Plant Watering SystemJulie RyneNo ratings yet
- Revolutionary Creative Thinking Method Unlocks Breakthrough IdeasDocument12 pagesRevolutionary Creative Thinking Method Unlocks Breakthrough IdeasDhanesh Kumar KasinathanNo ratings yet
- Seeking Assignments, in Which I Can Get More Exposure To New Dimensions of SAP in A Company of ReputeDocument4 pagesSeeking Assignments, in Which I Can Get More Exposure To New Dimensions of SAP in A Company of ReputeRam MohanNo ratings yet
- PSS SINCAL 15.5: Contingency AnalysisDocument34 pagesPSS SINCAL 15.5: Contingency AnalysisTang Thi Khanh VyNo ratings yet
- OpenLDAP Admin GuideDocument267 pagesOpenLDAP Admin Guidejonas leonel da silvaNo ratings yet
- Example ResumeDocument1 pageExample ResumeDanny PeckNo ratings yet
- Brocade Education Registration Rev0223Document24 pagesBrocade Education Registration Rev0223Fernando CarvalhoNo ratings yet
- Packet Tracer - Basic Switch ConfigurationDocument2 pagesPacket Tracer - Basic Switch ConfigurationKrystelle Ungria TimtimNo ratings yet
- C Lang Interview QuestionsDocument2 pagesC Lang Interview QuestionspoojaNo ratings yet
- MKC JV PTL DSN Eq DWG PCK 3a STR 0008 R03Document1 pageMKC JV PTL DSN Eq DWG PCK 3a STR 0008 R03Yongseok JangNo ratings yet
- Phonic Summit 1383126546Document2 pagesPhonic Summit 1383126546K SNo ratings yet
- Map Projections Part 1 Teacher's Notes Geography CLIL and ESL Lesson Plan by Cambridge Assessment EnglishDocument6 pagesMap Projections Part 1 Teacher's Notes Geography CLIL and ESL Lesson Plan by Cambridge Assessment EnglishManiurlNo ratings yet
- I. Curriculum Map Curriculum Map Template 1 Subject: Grade Level: Teacher (S) : Strand (S) : Term/MonthDocument25 pagesI. Curriculum Map Curriculum Map Template 1 Subject: Grade Level: Teacher (S) : Strand (S) : Term/MonthGel VelasquezcauzonNo ratings yet
- Removing the UEPP Display and Input DevicesDocument10 pagesRemoving the UEPP Display and Input Devicesرانا راشدNo ratings yet
- Reviews Scam, Legit or Safe Check Scamadviser PDFDocument1 pageReviews Scam, Legit or Safe Check Scamadviser PDFOghenetega udiNo ratings yet