You might also like
- M 1. S 8 or S 9. Etc. (Derive More!)Document5 pagesM 1. S 8 or S 9. Etc. (Derive More!)Eloy VegaNo ratings yet
- Constraint Satisfaction Problems: Unit 3Document28 pagesConstraint Satisfaction Problems: Unit 3youtube channelNo ratings yet
- Constraint Satisfaction Problems: Slides by Prof WELLINGDocument39 pagesConstraint Satisfaction Problems: Slides by Prof WELLINGProf. AHMED RIMAZ FAIZABADINo ratings yet
- A General Introduction To Artificial IntelligenceDocument58 pagesA General Introduction To Artificial IntelligenceÁnh PhạmNo ratings yet
- Lecture 6aDocument54 pagesLecture 6aSadia NiazNo ratings yet
- Constraint Satisfaction ProblemDocument43 pagesConstraint Satisfaction ProblemLucky Asr AwaisNo ratings yet
- Constraint Satisfaction Problems: Section 1 - 3Document36 pagesConstraint Satisfaction Problems: Section 1 - 3Anonymous 2C9l3iQNo ratings yet
- Artificial Intelligence: Constraint Satisfaction ProblemsDocument51 pagesArtificial Intelligence: Constraint Satisfaction Problemssurya kiranNo ratings yet
- Constraint Satisfaction Problems: Section 1 - 3Document44 pagesConstraint Satisfaction Problems: Section 1 - 3Tariq IqbalNo ratings yet
- Unit 2 Constraint Satisfaction ProblemsDocument52 pagesUnit 2 Constraint Satisfaction ProblemsManthan BosamiyaNo ratings yet
- Constraint Satisfaction ProblemsDocument35 pagesConstraint Satisfaction Problemsরাফিদ আহমেদNo ratings yet
- Constraint Satisfaction ProblemDocument3 pagesConstraint Satisfaction ProblemSushmita MhamaneNo ratings yet
- Lecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of TehranDocument47 pagesLecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of Tehrantrilok4391No ratings yet
- Constraint Satisfaction Problems (CSP)Document36 pagesConstraint Satisfaction Problems (CSP)ShamsNo ratings yet
- CspsDocument52 pagesCspsJetlin C PNo ratings yet
- AI-Lecture 7 (Constraint Satisfaction Problems)Document60 pagesAI-Lecture 7 (Constraint Satisfaction Problems)Yna ForondaNo ratings yet
- 5 CSPDocument70 pages5 CSPGUNEET SURANo ratings yet
- Constraint Satisfaction ProblemsDocument49 pagesConstraint Satisfaction ProblemsPoonam KumariNo ratings yet
- Problemas de Satisfacción de RestriccionesDocument40 pagesProblemas de Satisfacción de RestriccionesCamilo IsazaNo ratings yet
- Constraint Satisfaction ProblemDocument9 pagesConstraint Satisfaction ProblemswapsjagNo ratings yet
- m5 CSPDocument34 pagesm5 CSPanushanallagasu851No ratings yet
- Constraint Satisfaction ProblemDocument10 pagesConstraint Satisfaction ProblemSwapniltrinityNo ratings yet
- CspsDocument33 pagesCspsArthy JNo ratings yet
- Constraint Satisfaction ProblemsDocument10 pagesConstraint Satisfaction Problemsshikhar jainNo ratings yet
- Constraint Satisfaction Problems: Dr. Shahnawaz QureshiDocument44 pagesConstraint Satisfaction Problems: Dr. Shahnawaz QureshiSami AhmedNo ratings yet
- Constraint Satisfaction Problems: Soup Chicken Dish AppetizerDocument45 pagesConstraint Satisfaction Problems: Soup Chicken Dish AppetizerAyush SethiNo ratings yet
- Lec07 ConstraintsatisfactionDocument46 pagesLec07 ConstraintsatisfactionMD AminNo ratings yet
- (Part 1) CSPDocument16 pages(Part 1) CSPAhmed KhaledNo ratings yet
- CS 188: Artificial Intelligence: Constraint Satisfaction ProblemsDocument43 pagesCS 188: Artificial Intelligence: Constraint Satisfaction ProblemsSufi NoraniNo ratings yet
- Trí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsDocument33 pagesTrí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsVăn Lâm TrầnNo ratings yet
- Constraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelDocument55 pagesConstraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelRonaldo PitersonNo ratings yet
- JU Ch5Document26 pagesJU Ch5abebemako302No ratings yet
- CSPDocument9 pagesCSPSrinivas VemuriNo ratings yet
- 11 - CSPDocument40 pages11 - CSPSupriya NevewaniNo ratings yet
- Constraint Satisfaction ProblemsDocument77 pagesConstraint Satisfaction Problemsharshita.sharma.phd23No ratings yet
- CS 188 Introduction To Artificial Intelligence Spring 2019 Note 5Document10 pagesCS 188 Introduction To Artificial Intelligence Spring 2019 Note 5hellosunshine95No ratings yet
- Unit 3 CSPDocument32 pagesUnit 3 CSPSharanya EmmadisettyNo ratings yet
- Constraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerDocument17 pagesConstraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerMUHAMMAD ALINo ratings yet
- Constraint Satisfaction ProblemsDocument21 pagesConstraint Satisfaction ProblemsZoyes ShavanaNo ratings yet
- AI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningDocument11 pagesAI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningSaranya NarayanasettiNo ratings yet
- Chapter - 5-Constraint Satisfaction Problems-CspDocument25 pagesChapter - 5-Constraint Satisfaction Problems-CspabdisamedNo ratings yet
- Ai Assgnmt FinalDocument13 pagesAi Assgnmt FinalWondu GashahunNo ratings yet
- Module-3 Chapter 2Document39 pagesModule-3 Chapter 2IM AM INEVITABLENo ratings yet
- Ai Assgnmt FinalDocument13 pagesAi Assgnmt FinalWondu GashahunNo ratings yet
- Lecture 7 Constraint Satisfication ProblemDocument5 pagesLecture 7 Constraint Satisfication ProblemvikasNo ratings yet
- Sp14 Cs188 Lecture 4 - Csps IDocument43 pagesSp14 Cs188 Lecture 4 - Csps IYash OzaNo ratings yet
- Constraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Document55 pagesConstraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Gomathi ShanmugamNo ratings yet
- Sp14 Cs188 Lecture 5 - Csps IIDocument38 pagesSp14 Cs188 Lecture 5 - Csps IIimoptra143No ratings yet
- Constraint Satisfaction ProblemDocument37 pagesConstraint Satisfaction Problemniyati1120No ratings yet
- Nonparametric Density Estimation Nearest Neighbors, KNNDocument31 pagesNonparametric Density Estimation Nearest Neighbors, KNNiam_eckoNo ratings yet
- Constraint Satisfaction Problems IIDocument30 pagesConstraint Satisfaction Problems IIHuyCườngNo ratings yet
- Chapter 6 - CSPs - Part - 1Document40 pagesChapter 6 - CSPs - Part - 1Osama Al AsoouliNo ratings yet
- Constraint SatDocument57 pagesConstraint SatJetlin C PNo ratings yet
- CSPDocument45 pagesCSPnicholasfrancisNo ratings yet
- Constraint Satisfaction Problems: Prof. Abbas AL-BakriDocument41 pagesConstraint Satisfaction Problems: Prof. Abbas AL-BakriIhab AmerNo ratings yet
- cs221 hw5Document3 pagescs221 hw5tony1337No ratings yet
- Ai Assgnmt FinalDocument17 pagesAi Assgnmt FinalWondu GashahunNo ratings yet
- Constraint Satisfaction ProblemsDocument40 pagesConstraint Satisfaction Problemsapi-19801502No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Liebherr FCC 230 DatasheetDocument3 pagesLiebherr FCC 230 DatasheetAnderson BaziaNo ratings yet
- Senior DesignI Fall 2014 IntroductionDocument31 pagesSenior DesignI Fall 2014 IntroductionSarah WilliamsNo ratings yet
- Moblization Plan-CDocument7 pagesMoblization Plan-CTanveer IqbalNo ratings yet
- HIL Testing of ADAS FeaturesDocument4 pagesHIL Testing of ADAS FeaturesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Meistream Plus: Class C Bulkmeter For Cold Potable Water DN 40... 150 PN 16Document4 pagesMeistream Plus: Class C Bulkmeter For Cold Potable Water DN 40... 150 PN 16Raluca OlaruNo ratings yet
- Uttar Pradesh Uttarakhand Municipal Corporation Act 1959 PDFDocument333 pagesUttar Pradesh Uttarakhand Municipal Corporation Act 1959 PDFSandhya DwivediNo ratings yet
- R-L-C Circuit Analysis: ProcedureDocument2 pagesR-L-C Circuit Analysis: ProcedureAbhyuday ChauhanNo ratings yet
- David Brown Engineering LTDDocument2 pagesDavid Brown Engineering LTD'-MubashirBaigNo ratings yet
- Ugc Net: General Paper On Teaching & Research AptitudeDocument6 pagesUgc Net: General Paper On Teaching & Research AptitudeAkarshika pandeyNo ratings yet
- Lifting Lug Calculation - Concrete BucketDocument3 pagesLifting Lug Calculation - Concrete Bucketali akbarNo ratings yet
- EG110 (Spring 2021) Exam #2 Pelayo MartinezDocument6 pagesEG110 (Spring 2021) Exam #2 Pelayo MartinezPelayo MartinezNo ratings yet
- GP170101 Firefighting Equipment PDFDocument26 pagesGP170101 Firefighting Equipment PDFegfernandez21No ratings yet
- Website Design Contest-6!9!2023Document1 pageWebsite Design Contest-6!9!2023maha sowmeNo ratings yet
- Lawal Habeeb Babatunde: A Seminar Report OnDocument21 pagesLawal Habeeb Babatunde: A Seminar Report OnAyinde AbiodunNo ratings yet
- INA FAG Corrosion Resistant Products RVSDocument140 pagesINA FAG Corrosion Resistant Products RVSYoga0% (1)
- ReadMe NetDocument2 pagesReadMe NetMariano MartinezNo ratings yet
- Smart2020 United States Report AddendumDocument8 pagesSmart2020 United States Report AddendumL'Usine NouvelleNo ratings yet
- Architectural Visual CommunicationDocument17 pagesArchitectural Visual CommunicationSanderNo ratings yet
- The Intelligent Choice in Comfort: Split & Window Type Air ConditionersDocument32 pagesThe Intelligent Choice in Comfort: Split & Window Type Air Conditionersfrancesco camporealeNo ratings yet
- Toyota WayDocument6 pagesToyota WayMeth RonoNo ratings yet
- Hrvatski Registar Civilnih ZrakoplovaDocument22 pagesHrvatski Registar Civilnih ZrakoplovaIvo JosipNo ratings yet
- In-Display Fingerprint SensorDocument20 pagesIn-Display Fingerprint SensorPrakhil SethiNo ratings yet
- Method Statement For Miscellaneous Metal WorksDocument19 pagesMethod Statement For Miscellaneous Metal Worksmohsin.meizaNo ratings yet
- Advanced Electronic ComponentsDocument17 pagesAdvanced Electronic Componentsprem_chandranNo ratings yet
- Skip Cycle EngineDocument8 pagesSkip Cycle Enginekumar_yogesh223881No ratings yet
- 5 Heating SystemsDocument29 pages5 Heating Systemsventus13No ratings yet
- 10.1.3.5 UpgradeDocument11 pages10.1.3.5 UpgradeLokesh ChinniNo ratings yet
- 10 11648 J Ijmsa 20130203 14 PDFDocument5 pages10 11648 J Ijmsa 20130203 14 PDFRima AroraNo ratings yet
- Typological and Constructive Transformations of Spatial Structures in Mexico. The Sports Palace For The XIX OlympicsDocument10 pagesTypological and Constructive Transformations of Spatial Structures in Mexico. The Sports Palace For The XIX OlympicsMuhamet AhmetiNo ratings yet
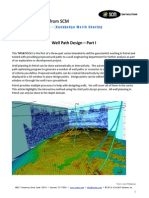
- SCM Well Path Design Part IDocument9 pagesSCM Well Path Design Part IPeter LeOn LeOnNo ratings yet