You might also like
- Constraint Satisfaction ProblemsDocument26 pagesConstraint Satisfaction Problems124 SHAIL SINGHNo ratings yet
- Constraint Satisfaction Problems: Dr. Shahnawaz QureshiDocument44 pagesConstraint Satisfaction Problems: Dr. Shahnawaz QureshiSami AhmedNo ratings yet
- Lecture 6aDocument54 pagesLecture 6aSadia NiazNo ratings yet
- Constraint Satisfaction Problems: Section 1 - 3Document44 pagesConstraint Satisfaction Problems: Section 1 - 3Tariq IqbalNo ratings yet
- Constraint Satisfaction Problems: Section 1 - 3Document36 pagesConstraint Satisfaction Problems: Section 1 - 3Anonymous 2C9l3iQNo ratings yet
- Constraint Satisfaction Problems: Slides by Prof WELLINGDocument39 pagesConstraint Satisfaction Problems: Slides by Prof WELLINGProf. AHMED RIMAZ FAIZABADINo ratings yet
- A General Introduction To Artificial IntelligenceDocument58 pagesA General Introduction To Artificial IntelligenceÁnh PhạmNo ratings yet
- Name: R.Viswaesvaran - Class: 11a - Sns AcademyDocument22 pagesName: R.Viswaesvaran - Class: 11a - Sns AcademyViswa DexterNo ratings yet
- Constraint Satisfaction Problems: Unit 3Document28 pagesConstraint Satisfaction Problems: Unit 3youtube channelNo ratings yet
- Constraint Satisfaction Problems: Section 1 - 3Document34 pagesConstraint Satisfaction Problems: Section 1 - 3chakravarthyashokNo ratings yet
- Constraint Satisfaction ProblemDocument43 pagesConstraint Satisfaction ProblemLucky Asr AwaisNo ratings yet
- 5 CSPDocument70 pages5 CSPGUNEET SURANo ratings yet
- JU Ch5Document26 pagesJU Ch5abebemako302No ratings yet
- AI-Lecture 7 (Constraint Satisfaction Problems)Document60 pagesAI-Lecture 7 (Constraint Satisfaction Problems)Yna ForondaNo ratings yet
- Artificial Intelligence: Russell & Norvig, AI: A Modern Approach, 3rd EdDocument40 pagesArtificial Intelligence: Russell & Norvig, AI: A Modern Approach, 3rd EdRafinNo ratings yet
- Constraint Satisfaction ProblemsDocument21 pagesConstraint Satisfaction ProblemsZoyes ShavanaNo ratings yet
- CS 188: Artificial Intelligence: Constraint Satisfaction ProblemsDocument43 pagesCS 188: Artificial Intelligence: Constraint Satisfaction ProblemsSufi NoraniNo ratings yet
- CSPDocument45 pagesCSPnicholasfrancisNo ratings yet
- Constraint Satisfaction Problems: Prof. Abbas AL-BakriDocument41 pagesConstraint Satisfaction Problems: Prof. Abbas AL-BakriIhab AmerNo ratings yet
- Constraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelDocument55 pagesConstraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelRonaldo PitersonNo ratings yet
- Constraint Satisfaction Problems (CSP)Document36 pagesConstraint Satisfaction Problems (CSP)ShamsNo ratings yet
- Constraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Document55 pagesConstraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Gomathi ShanmugamNo ratings yet
- Sp14 Cs188 Lecture 4 - Csps IDocument43 pagesSp14 Cs188 Lecture 4 - Csps IYash OzaNo ratings yet
- m5 CSPDocument34 pagesm5 CSPanushanallagasu851No ratings yet
- Constraint Satisfaction ProblemsDocument35 pagesConstraint Satisfaction Problemsরাফিদ আহমেদNo ratings yet
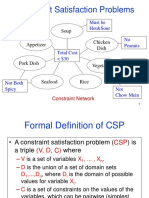
- Constraint Satisfaction Problems: Soup Chicken Dish AppetizerDocument45 pagesConstraint Satisfaction Problems: Soup Chicken Dish AppetizerAyush SethiNo ratings yet
- Backtracking Search For CSPS: Artificial Intelligence COSC-3112 Ms. Humaira AnwerDocument24 pagesBacktracking Search For CSPS: Artificial Intelligence COSC-3112 Ms. Humaira AnwerMUHAMMAD ALINo ratings yet
- CspsDocument52 pagesCspsJetlin C PNo ratings yet
- M 1. S 8 or S 9. Etc. (Derive More!)Document5 pagesM 1. S 8 or S 9. Etc. (Derive More!)Eloy VegaNo ratings yet
- Artificial Intelligence: Constraint Satisfaction ProblemsDocument51 pagesArtificial Intelligence: Constraint Satisfaction Problemssurya kiranNo ratings yet
- 05 CSPDocument28 pages05 CSPNada ElokabyNo ratings yet
- Unit 2 Constraint Satisfaction ProblemsDocument52 pagesUnit 2 Constraint Satisfaction ProblemsManthan BosamiyaNo ratings yet
- Constraint Satisfaction ProblemsDocument40 pagesConstraint Satisfaction Problemsapi-19801502No ratings yet
- 4 CSP IntroDocument27 pages4 CSP Introyaserif915No ratings yet
- 11 - CSPDocument40 pages11 - CSPSupriya NevewaniNo ratings yet
- Constraint Satisfaction ProblemDocument10 pagesConstraint Satisfaction ProblemSwapniltrinityNo ratings yet
- Trí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsDocument33 pagesTrí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsVăn Lâm TrầnNo ratings yet
- Constraint Satisfaction ProblemDocument9 pagesConstraint Satisfaction ProblemswapsjagNo ratings yet
- Constraint Satisfaction Problems: Section 1 - 3Document34 pagesConstraint Satisfaction Problems: Section 1 - 3expocoinsNo ratings yet
- Lec08 csp2Document29 pagesLec08 csp2sowdaga mustafizur rahmanNo ratings yet
- Sp14 Cs188 Lecture 5 - Csps IIDocument38 pagesSp14 Cs188 Lecture 5 - Csps IIimoptra143No ratings yet
- (Part 1) CSPDocument16 pages(Part 1) CSPAhmed KhaledNo ratings yet
- Unit 4Document36 pagesUnit 4khatuaryan16No ratings yet
- Lecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of TehranDocument47 pagesLecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of Tehrantrilok4391No ratings yet
- CS 188 Introduction To Artificial Intelligence Spring 2019 Note 5Document10 pagesCS 188 Introduction To Artificial Intelligence Spring 2019 Note 5hellosunshine95No ratings yet
- CspsDocument33 pagesCspsArthy JNo ratings yet
- Lecture8 NotesDocument81 pagesLecture8 NotesAmir Mohamed Nabil Saleh ElghameryNo ratings yet
- AI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningDocument11 pagesAI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningSaranya NarayanasettiNo ratings yet
- c6 ConstraintsDocument42 pagesc6 ConstraintsSamir SabryNo ratings yet
- Constraint Satisfaction ProblemsDocument42 pagesConstraint Satisfaction Problemsjiminisinbts02No ratings yet
- Constraint Satisfaction Problems: Foundations of Artificial IntelligenceDocument62 pagesConstraint Satisfaction Problems: Foundations of Artificial Intelligence林佳緯No ratings yet
- Understanding Constraint Satisfaction ProblemsDocument10 pagesUnderstanding Constraint Satisfaction Problemsjiminisinbts02No ratings yet
- Constraint Satisfaction ProblemsDocument77 pagesConstraint Satisfaction Problemsharshita.sharma.phd23No ratings yet
- Constraint Satisfaction Problems IIDocument30 pagesConstraint Satisfaction Problems IIHuyCườngNo ratings yet
- Problemas de Satisfacción de RestriccionesDocument40 pagesProblemas de Satisfacción de RestriccionesCamilo IsazaNo ratings yet
- Lec 4Document33 pagesLec 4Vân AnhNo ratings yet
- Cs188-Sp23-Lec07 CSPDocument37 pagesCs188-Sp23-Lec07 CSPkhanhlinhkstndtvtk57No ratings yet
- Constraint Satisfaction ProblemsDocument42 pagesConstraint Satisfaction ProblemsShrikant SaxenaNo ratings yet
- Thesis Slides 2022Document13 pagesThesis Slides 2022abdisamedNo ratings yet
- The Effect of Motivation On Employee Performance 2022Document60 pagesThe Effect of Motivation On Employee Performance 2022abdisamedNo ratings yet
- Thesis Slides 2022 (1) Fadlan AqriDocument14 pagesThesis Slides 2022 (1) Fadlan AqriabdisamedNo ratings yet
- Thesis Guidlines For LUCDocument19 pagesThesis Guidlines For LUCabdisamedNo ratings yet
- Research Format-2Document3 pagesResearch Format-2abdisamedNo ratings yet
- Chapter OneDocument14 pagesChapter OneabdisamedNo ratings yet
- Lincoln University Collage Alpha University Name: Contact TitleDocument2 pagesLincoln University Collage Alpha University Name: Contact TitleabdisamedNo ratings yet
- SeizureDocument16 pagesSeizureabdisamedNo ratings yet
- HusseinDocument3 pagesHusseinabdisamedNo ratings yet
- Conceptual FrameworkDocument1 pageConceptual FrameworkabdisamedNo ratings yet
- HusseinDocument3 pagesHusseinabdisamedNo ratings yet
- Group7: - Umalkhyr Nimcan - Umalkhyr Omer - Samsam Ahmed Daahir - Salma Cilmi - Siraaj OmerDocument15 pagesGroup7: - Umalkhyr Nimcan - Umalkhyr Omer - Samsam Ahmed Daahir - Salma Cilmi - Siraaj OmerabdisamedNo ratings yet
- DIVERSITYDocument3 pagesDIVERSITYabdisamedNo ratings yet
- Chapter 1 Food Processing and PackagingDocument17 pagesChapter 1 Food Processing and PackagingabdisamedNo ratings yet
- Sunlight Medical College: Department of Health ScienceDocument9 pagesSunlight Medical College: Department of Health ScienceabdisamedNo ratings yet
- Operations Research: by Dr. S.M. IsrarDocument18 pagesOperations Research: by Dr. S.M. IsrarabdisamedNo ratings yet
- Chapter 9 FermentationDocument10 pagesChapter 9 FermentationabdisamedNo ratings yet
- Chap 4 BudgetingDocument39 pagesChap 4 BudgetingabdisamedNo ratings yet
- Chapter 3 Quality in FoodDocument15 pagesChapter 3 Quality in FoodabdisamedNo ratings yet
- Sunlight Medical College: VaccinationDocument17 pagesSunlight Medical College: VaccinationabdisamedNo ratings yet
- Amoud University Artificial Intelligence: Introduction: Chapter 1Document24 pagesAmoud University Artificial Intelligence: Introduction: Chapter 1abdisamedNo ratings yet
- Chapter 9Document33 pagesChapter 9abdisamedNo ratings yet
- Project SuccessDocument13 pagesProject SuccessabdisamedNo ratings yet
- Chapter 1, Lecture 2 Management StylesDocument17 pagesChapter 1, Lecture 2 Management StylesabdisamedNo ratings yet
- Financial Literacy: Making Sense of Your Dollars and CentsDocument17 pagesFinancial Literacy: Making Sense of Your Dollars and CentsabdisamedNo ratings yet
- Introduction To Operations Management: Mcgraw-Hill/IrwinDocument30 pagesIntroduction To Operations Management: Mcgraw-Hill/IrwinabdisamedNo ratings yet
- Assignment: Power PointDocument10 pagesAssignment: Power PointabdisamedNo ratings yet
- Chapter 4 Project2Document8 pagesChapter 4 Project2abdisamedNo ratings yet
- 4-Systematic Surgery Abdominal HerniaDocument44 pages4-Systematic Surgery Abdominal HerniaabdisamedNo ratings yet
- Array Implementation of Queue (Simple) - GeeksforGeeksDocument9 pagesArray Implementation of Queue (Simple) - GeeksforGeeksKhandakar HossinNo ratings yet
- Operating System May 19: Computer Engineering (Semester 4)Document3 pagesOperating System May 19: Computer Engineering (Semester 4)Husain SadriwalaNo ratings yet
- Stack QuesDocument6 pagesStack QuesRaffi SkNo ratings yet
- hw5 2Document4 pageshw5 2api-526463519No ratings yet
- Data Structure Multiple Choice Questions and Answer PDFDocument9 pagesData Structure Multiple Choice Questions and Answer PDFG H VamsiNo ratings yet
- V4i1201557Document16 pagesV4i1201557multe123No ratings yet
- Fundamental Algorithms CSCI-GA.1170-001 /summer 2016 Solution To Homework 1Document6 pagesFundamental Algorithms CSCI-GA.1170-001 /summer 2016 Solution To Homework 1siddharth1kNo ratings yet
- Advance Data StructureDocument15 pagesAdvance Data StructureMuraliKrishnaNo ratings yet
- Import Import DefDocument2 pagesImport Import DefHARSHITHA DNo ratings yet
- School of Technology: Simulation and ModellingDocument38 pagesSchool of Technology: Simulation and ModellingOlivia GwenNo ratings yet
- ch9 Ensemble LearningDocument19 pagesch9 Ensemble LearningJuan ZarateNo ratings yet
- Trie Data Structure ImplementationDocument12 pagesTrie Data Structure ImplementationKusuma SanjeevNo ratings yet
- Algorithms Design and Analysis DP Sheet: Year 3 22 20 - Semester 2Document16 pagesAlgorithms Design and Analysis DP Sheet: Year 3 22 20 - Semester 2youssef amrNo ratings yet
- Pure & Mixed IPP Gomory's CuttingDocument42 pagesPure & Mixed IPP Gomory's CuttingKrishnaNo ratings yet
- Shantanu-3 3Document5 pagesShantanu-3 3Srijan MishraNo ratings yet
- Data Structure Solved Q Paper From 2017 To 2019Document180 pagesData Structure Solved Q Paper From 2017 To 2019Sakshi SonavaneNo ratings yet
- C++ Plus Data Structures: Nell DaleDocument41 pagesC++ Plus Data Structures: Nell Daleahmed ahmedNo ratings yet
- 1 Greedy Algorithms: 1.1 Activity Selection ProblemDocument6 pages1 Greedy Algorithms: 1.1 Activity Selection ProblemUtkarsh UtkarshNo ratings yet
- Trees and Binary TreesDocument53 pagesTrees and Binary TreesMALA AKHILA SREENo ratings yet
- AI Lecture 03 (Uninformed Search)Document43 pagesAI Lecture 03 (Uninformed Search)Bishowjit DattaNo ratings yet
- Address CalculationDocument20 pagesAddress CalculationDr-Himani MaheshwariNo ratings yet
- Fuck You ScribdDocument1 pageFuck You ScribdGeoffrey LiuNo ratings yet
- CB - Linked ListDocument44 pagesCB - Linked ListAryan RathoreNo ratings yet
- Transportation and Assignment Models in Operations ResearchDocument3 pagesTransportation and Assignment Models in Operations ResearchE5251888100% (1)
- Lecture 06-20220813Document9 pagesLecture 06-20220813Kundan karnNo ratings yet
- O (N) O (Log Log N) )Document4 pagesO (N) O (Log Log N) )ArviNo ratings yet
- Ps 10Document2 pagesPs 10Mano Ranjith Kumar M 007684No ratings yet
- ADA LabDocument30 pagesADA LabRajkiran BoppanaNo ratings yet
- PDS 1 PDFDocument14 pagesPDS 1 PDFPRIYA RAJINo ratings yet
- DS-Unit 3Document74 pagesDS-Unit 3Shashank ReddyNo ratings yet