You might also like
- Lec07 ConstraintsatisfactionDocument46 pagesLec07 ConstraintsatisfactionMD AminNo ratings yet
- Constraint Satisfaction ProblemsDocument10 pagesConstraint Satisfaction Problemsshikhar jainNo ratings yet
- Module-3 Chapter 2Document39 pagesModule-3 Chapter 2IM AM INEVITABLENo ratings yet
- Artificial Intelligence: Constraint Satisfaction ProblemsDocument51 pagesArtificial Intelligence: Constraint Satisfaction Problemssurya kiranNo ratings yet
- AI-Lecture 7 (Constraint Satisfaction Problems)Document60 pagesAI-Lecture 7 (Constraint Satisfaction Problems)Yna ForondaNo ratings yet
- Ai Assgnmt FinalDocument13 pagesAi Assgnmt FinalWondu GashahunNo ratings yet
- Constraint Satisfaction ProblemDocument37 pagesConstraint Satisfaction Problemniyati1120No ratings yet
- Constraint SatDocument57 pagesConstraint SatJetlin C PNo ratings yet
- Ai Assgnmt FinalDocument17 pagesAi Assgnmt FinalWondu GashahunNo ratings yet
- Constraint Satisfaction ProblemsDocument42 pagesConstraint Satisfaction ProblemsShrikant SaxenaNo ratings yet
- Constraint Satisfaction ProblemsDocument42 pagesConstraint Satisfaction Problemsjiminisinbts02No ratings yet
- Chapter 6 - CSPs - Part - 1Document40 pagesChapter 6 - CSPs - Part - 1Osama Al AsoouliNo ratings yet
- Constraint Satisfaction ProblemsDocument77 pagesConstraint Satisfaction Problemsharshita.sharma.phd23No ratings yet
- Ai Assgnmt FinalDocument13 pagesAi Assgnmt FinalWondu GashahunNo ratings yet
- Constraint Satisfaction ProblemDocument43 pagesConstraint Satisfaction ProblemLucky Asr AwaisNo ratings yet
- Constraint Satisfaction ProblemsDocument49 pagesConstraint Satisfaction ProblemsPoonam KumariNo ratings yet
- Trí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsDocument33 pagesTrí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsVăn Lâm TrầnNo ratings yet
- Constraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelDocument55 pagesConstraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelRonaldo PitersonNo ratings yet
- Constraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerDocument17 pagesConstraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerMUHAMMAD ALINo ratings yet
- CSPDocument9 pagesCSPSrinivas VemuriNo ratings yet
- AI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningDocument11 pagesAI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningSaranya NarayanasettiNo ratings yet
- Constraint Satisfaction ProblemDocument10 pagesConstraint Satisfaction ProblemSwapniltrinityNo ratings yet
- CS302 - Unit1-V-Constraint Satisfaction ProblemDocument7 pagesCS302 - Unit1-V-Constraint Satisfaction ProblemPrakhar GargNo ratings yet
- Constraint Satisfaction ProblemsDocument75 pagesConstraint Satisfaction Problemsshruti soniNo ratings yet
- Constraint Satisfaction Problems: Unit 3Document28 pagesConstraint Satisfaction Problems: Unit 3youtube channelNo ratings yet
- Constraint Satisfaction ProblemDocument9 pagesConstraint Satisfaction ProblemswapsjagNo ratings yet
- Constraint SatisfactionDocument27 pagesConstraint SatisfactionRaghu SomuNo ratings yet
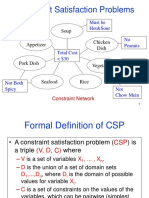
- Constraint Satisfaction Problems: Soup Chicken Dish AppetizerDocument45 pagesConstraint Satisfaction Problems: Soup Chicken Dish AppetizerAyush SethiNo ratings yet
- Constraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerDocument15 pagesConstraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerMUHAMMAD ALINo ratings yet
- Russell & Norvig Ch. 5: - Constraint Satisfaction Offers A Powerful Problem-Solving ParadigmDocument20 pagesRussell & Norvig Ch. 5: - Constraint Satisfaction Offers A Powerful Problem-Solving ParadigmirinarmNo ratings yet
- 11 - CSPDocument40 pages11 - CSPSupriya NevewaniNo ratings yet
- Constraint Satisfaction Problems (CSP)Document36 pagesConstraint Satisfaction Problems (CSP)ShamsNo ratings yet
- Constraint Satisfaction Problems: Version 2 CSE IIT, KharagpurDocument17 pagesConstraint Satisfaction Problems: Version 2 CSE IIT, KharagpurVanu ShaNo ratings yet
- 05 CSPDocument28 pages05 CSPNada ElokabyNo ratings yet
- Cse-3201 (Ai - 08) PDFDocument38 pagesCse-3201 (Ai - 08) PDFmna shourovNo ratings yet
- 2014wq171 08 ConstraintSatisfactionDocument106 pages2014wq171 08 ConstraintSatisfactionTrương Thuận KiệtNo ratings yet
- A General Introduction To Artificial IntelligenceDocument58 pagesA General Introduction To Artificial IntelligenceÁnh PhạmNo ratings yet
- Lecture 7 Constraint Satisfication ProblemDocument5 pagesLecture 7 Constraint Satisfication ProblemvikasNo ratings yet
- Unit IvDocument92 pagesUnit Ivmdsamiurrahaman04No ratings yet
- 5 CSPDocument70 pages5 CSPGUNEET SURANo ratings yet
- AI Module3 2 Constraint Satisfaction Problems (1) SRKDocument36 pagesAI Module3 2 Constraint Satisfaction Problems (1) SRKltalluriNo ratings yet
- CSP Basic Intro ChessDocument49 pagesCSP Basic Intro Chessapi-27044292No ratings yet
- Unit 2 Constraint Satisfaction ProblemsDocument52 pagesUnit 2 Constraint Satisfaction ProblemsManthan BosamiyaNo ratings yet
- CspsDocument52 pagesCspsJetlin C PNo ratings yet
- Constraint Satisfaction Problems: Dr. Amar Singh Associate Professor, School of Computer ApplicationsDocument18 pagesConstraint Satisfaction Problems: Dr. Amar Singh Associate Professor, School of Computer ApplicationsDarshan JainNo ratings yet
- Artificial Intelligence Methods: Marc Erich Latoschik Ai & VR Lab Artificial Intelligence Group University of BielefeldDocument10 pagesArtificial Intelligence Methods: Marc Erich Latoschik Ai & VR Lab Artificial Intelligence Group University of BielefeldAnkur SharmaNo ratings yet
- CspsDocument33 pagesCspsArthy JNo ratings yet
- Constraint Satisfaction Problems: Prof. Abbas AL-BakriDocument41 pagesConstraint Satisfaction Problems: Prof. Abbas AL-BakriIhab AmerNo ratings yet
- AI-Module3-2-Constraint Satisfaction ProblemsDocument27 pagesAI-Module3-2-Constraint Satisfaction Problemslosojew161No ratings yet
- Lecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of TehranDocument47 pagesLecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of Tehrantrilok4391No ratings yet
- AI-Lecture 7 (Constraint Satisfaction Problem)Document80 pagesAI-Lecture 7 (Constraint Satisfaction Problem)Braga Gladys MaeNo ratings yet
- AI-Lecture 7 (Constraint Satisfaction Problem)Document80 pagesAI-Lecture 7 (Constraint Satisfaction Problem)Braga Gladys MaeNo ratings yet
- Cs188-Sp23-Lec07 CSPDocument37 pagesCs188-Sp23-Lec07 CSPkhanhlinhkstndtvtk57No ratings yet
- CS 188 Introduction To Artificial Intelligence Spring 2019 Note 5Document10 pagesCS 188 Introduction To Artificial Intelligence Spring 2019 Note 5hellosunshine95No ratings yet
- Aifa 9 CSP 120923Document19 pagesAifa 9 CSP 120923Das SkrillexNo ratings yet
- Constraint Programming: Toby Walsh Unsw and NictaDocument62 pagesConstraint Programming: Toby Walsh Unsw and Nictakyle_namgal1679No ratings yet
- JU Ch5Document26 pagesJU Ch5abebemako302No ratings yet
- Discrete14 Part1Document13 pagesDiscrete14 Part1Bui Dinh Nguyen NgocNo ratings yet
- Variational Methods for Boundary Value Problems for Systems of Elliptic EquationsFrom EverandVariational Methods for Boundary Value Problems for Systems of Elliptic EquationsNo ratings yet
- Mini Max AlgorithmDocument31 pagesMini Max AlgorithmSharanya EmmadisettyNo ratings yet
- Unit 3 1Document18 pagesUnit 3 1Sharanya EmmadisettyNo ratings yet
- K - Means ClusteringDocument23 pagesK - Means ClusteringSharanya EmmadisettyNo ratings yet
- Ret Unit IvDocument48 pagesRet Unit IvSharanya EmmadisettyNo ratings yet
- Unit IVDocument45 pagesUnit IVSharanya EmmadisettyNo ratings yet
- Unit ViDocument15 pagesUnit ViSharanya EmmadisettyNo ratings yet
- Unit V - NewDocument46 pagesUnit V - NewSharanya EmmadisettyNo ratings yet
- RET Important QuestionsDocument6 pagesRET Important QuestionsSharanya EmmadisettyNo ratings yet
- 247248-The Histiry and Culture of The Indian People, The Vedic Age Vol I - DjvuDocument620 pages247248-The Histiry and Culture of The Indian People, The Vedic Age Vol I - DjvuDeja ImagenationNo ratings yet
- Questions and AnswersDocument14 pagesQuestions and AnswersRishit KunwarNo ratings yet
- Desktop F0ecjd0 20230613 0007Document8 pagesDesktop F0ecjd0 20230613 0007Mican HoriaNo ratings yet
- Electronic Instrumentation and Measurement Full PDFDocument143 pagesElectronic Instrumentation and Measurement Full PDFchildhoodtoons81No ratings yet
- Cryptography and Its Types - GeeksforGeeksDocument2 pagesCryptography and Its Types - GeeksforGeeksGirgio Moratti CullenNo ratings yet
- F612/F627/F626B: Semi-Lugged Gearbox Operated Butterfly Valves PN16Document1 pageF612/F627/F626B: Semi-Lugged Gearbox Operated Butterfly Valves PN16RonaldNo ratings yet
- EasyEPD2 Manual 2003 12 04Document98 pagesEasyEPD2 Manual 2003 12 04Filipe LaínsNo ratings yet
- ProjectDocument14 pagesProjectNavneet singh50% (2)
- Ocr GttsDocument49 pagesOcr GttsKshitij NishantNo ratings yet
- Oilfield Review January 1993Document59 pagesOilfield Review January 1993Andres PalladinoNo ratings yet
- Albright DADM 6e - PPT - Ch04Document27 pagesAlbright DADM 6e - PPT - Ch04Zoel-Fazlee OmarNo ratings yet
- EENG226 Lab1 PDFDocument5 pagesEENG226 Lab1 PDFSaif HassanNo ratings yet
- ITC LAB 4 - FlowchartsDocument7 pagesITC LAB 4 - FlowchartspathwayNo ratings yet
- Sample Midterm (Lab)Document3 pagesSample Midterm (Lab)Shahab designerNo ratings yet
- Submittal Patterson Bombs PDFDocument77 pagesSubmittal Patterson Bombs PDFFred GarciaNo ratings yet
- Rodavigo Acoplamientos 02 Acoplamientos de BielasDocument20 pagesRodavigo Acoplamientos 02 Acoplamientos de BielasArturo J. Londono MNo ratings yet
- Leak Off Test: - Procedure - Maasp - Maximum Allowable Mud WeightDocument5 pagesLeak Off Test: - Procedure - Maasp - Maximum Allowable Mud Weighteng20072007No ratings yet
- Basaraba Resume 2023 2Document3 pagesBasaraba Resume 2023 2api-701709208No ratings yet
- SWFP66D Series Fine-Grinding Hammer Mill: Operation ManualDocument65 pagesSWFP66D Series Fine-Grinding Hammer Mill: Operation ManualDanielDeFrancescoNo ratings yet
- Data AcquisitionDocument28 pagesData Acquisitionvkv.foeNo ratings yet
- Java DL 2023Document16 pagesJava DL 2023Sktr BhanuNo ratings yet
- Gyproc Regular BoardsDocument6 pagesGyproc Regular BoardsRadhika Veerala100% (1)
- Getting Started With PIC Microcontroller - CCS C Compiler PDFDocument19 pagesGetting Started With PIC Microcontroller - CCS C Compiler PDFNithya100% (2)
- Cat 320 Next Gen Excavator BrochureDocument16 pagesCat 320 Next Gen Excavator BrochureKeron TrotzNo ratings yet
- Love Marriage Specialist PanditDocument3 pagesLove Marriage Specialist PanditLove marriage specialist panditNo ratings yet
- Google Map - DartDocument9 pagesGoogle Map - Dartİlter Engin KIZILGÜNNo ratings yet
- OpenTaps in RetailDocument13 pagesOpenTaps in RetailtarunsainaniNo ratings yet
- Selling NDocument33 pagesSelling NADITYA VARPENo ratings yet
- Pune - List of Prospsct SchoolsDocument28 pagesPune - List of Prospsct SchoolsviveknairNo ratings yet
- An Experimental Study On Airborne Landmine DetectiDocument7 pagesAn Experimental Study On Airborne Landmine Detecticlinton ruleNo ratings yet