You might also like
- AttachmentDocument20 pagesAttachmentyohannisyohannis54No ratings yet
- Engineering Mechanics I (Stat) Handout-1-14Document14 pagesEngineering Mechanics I (Stat) Handout-1-14Hamlity SaintataNo ratings yet
- Chapter IDocument12 pagesChapter InvnrevNo ratings yet
- Mechanics - Notes - Improved (1) - 1Document65 pagesMechanics - Notes - Improved (1) - 1MUSIBIRA PAULNo ratings yet
- Summarized Notes of Engineering Mechanics OneDocument64 pagesSummarized Notes of Engineering Mechanics OneRogers BenjaminNo ratings yet
- MEC420 Chapter 1 - Part 1 - StudentDocument31 pagesMEC420 Chapter 1 - Part 1 - StudentMuhammad Azizi bin Abd AzizNo ratings yet
- Addis Ababa University Faculty of Technology Department of Civil EngineeringDocument63 pagesAddis Ababa University Faculty of Technology Department of Civil EngineeringZi BogaleNo ratings yet
- Engineering Mechanics Meriam Kraige 6th EditionDocument20 pagesEngineering Mechanics Meriam Kraige 6th Editionahmad attaNo ratings yet
- Statics Note Dawit's PDFDocument59 pagesStatics Note Dawit's PDFDawit GebrehanaNo ratings yet
- Applied Mechanics FundamentalsDocument82 pagesApplied Mechanics FundamentalsUmer RazaqNo ratings yet
- Engineering MechanicsDocument112 pagesEngineering Mechanicsch pavan kumarNo ratings yet
- Basic Concepts of Engineering MechanicsDocument19 pagesBasic Concepts of Engineering MechanicsayingbaNo ratings yet
- EEE - 2105 - L1 To 2Document20 pagesEEE - 2105 - L1 To 2KISAKYE MOSESNo ratings yet
- Engineering Mechanics For Civil Engr.Document112 pagesEngineering Mechanics For Civil Engr.Clara Ogladit100% (1)
- General Principals: MechanicsDocument6 pagesGeneral Principals: MechanicsHussainNo ratings yet
- Statics Note Abraham'sDocument62 pagesStatics Note Abraham'sAklilu NegaNo ratings yet
- Lecture 1Document22 pagesLecture 1نصرت سعد نصرتNo ratings yet
- Chapter 1Document24 pagesChapter 1Yordanos AbebawNo ratings yet
- Dr. Firas K. AL-Zuhairi E-Mail: 150009@uotechnology - Edu.iq: Engineering MechanicsDocument28 pagesDr. Firas K. AL-Zuhairi E-Mail: 150009@uotechnology - Edu.iq: Engineering Mechanicsحسين راشد عيسى كريمNo ratings yet
- Engineering Mechanics: Statics Lecture 1 PDFDocument16 pagesEngineering Mechanics: Statics Lecture 1 PDFKhalid YousafNo ratings yet
- Engineering Mechanics (Statics)Document32 pagesEngineering Mechanics (Statics)fahimNo ratings yet
- Chapter One Scalar and VectorsDocument9 pagesChapter One Scalar and VectorsHenok GirmaNo ratings yet
- EM PPT II SemDocument398 pagesEM PPT II SemsridharanNo ratings yet
- CES2104 Lecture 1 - Introduction To Statics PDFDocument23 pagesCES2104 Lecture 1 - Introduction To Statics PDFCarlitos AdarnaNo ratings yet
- Engineering Mechanics I Lecture NoteDocument62 pagesEngineering Mechanics I Lecture NoteMesgina G-herNo ratings yet
- Engineering Mechanics: Rusul Khalid Polymer and Petrochemical EngineeringDocument18 pagesEngineering Mechanics: Rusul Khalid Polymer and Petrochemical EngineeringAli aliraqiNo ratings yet
- Chapter 1 - Force Systems - Part ADocument14 pagesChapter 1 - Force Systems - Part ACheong JkNo ratings yet
- Chapter 1 Basic of StaticsDocument42 pagesChapter 1 Basic of StaticsTewodros AliNo ratings yet
- ME211 Week1Document14 pagesME211 Week1bm7gyygjtfNo ratings yet
- Lecture 1 Introduction To Statics and Force VectorsDocument27 pagesLecture 1 Introduction To Statics and Force VectorsChloe SaludesNo ratings yet
- ATec 2048 Student Version-1Document47 pagesATec 2048 Student Version-1andualem nigussieNo ratings yet
- Fundamentals of Engineering MechanicsDocument19 pagesFundamentals of Engineering MechanicsayingbaNo ratings yet
- 1.1 Introduction To DynamicsDocument5 pages1.1 Introduction To DynamicsKaren MenesesNo ratings yet
- Prepared By: Engr. Lucia V. Ortega 8/28/20 Statics of Rigid BodiesDocument11 pagesPrepared By: Engr. Lucia V. Ortega 8/28/20 Statics of Rigid BodiesJoren JamesNo ratings yet
- Lecture Week 1 and 2 - MEG 214Document43 pagesLecture Week 1 and 2 - MEG 214Jerry EssenNo ratings yet
- 1 Comp PhyDocument36 pages1 Comp PhyThatukuru LakshmanNo ratings yet
- Final Unit-1A (EME-151,152)Document17 pagesFinal Unit-1A (EME-151,152)guptakrish330No ratings yet
- Chapter1 PDFDocument33 pagesChapter1 PDFObsa KassahunNo ratings yet
- Module 1 - Introduction To Mechanics PDFDocument10 pagesModule 1 - Introduction To Mechanics PDFsubyNo ratings yet
- Course Outline: - Week 1, January 4 and 6Document23 pagesCourse Outline: - Week 1, January 4 and 6Michael DemianNo ratings yet
- Overviews of StaticsDocument70 pagesOverviews of StaticsJacous WcyNo ratings yet
- Mecánica de Cuerpos Rígidos (Introducción A La Estática)Document24 pagesMecánica de Cuerpos Rígidos (Introducción A La Estática)Kevin RodriguezNo ratings yet
- Chapter 1Document28 pagesChapter 1Dina Rivera RabilasNo ratings yet
- AD01 - Basic Concepts in DynamicsDocument9 pagesAD01 - Basic Concepts in DynamicscooLkiD1412No ratings yet
- Statics NoteDocument47 pagesStatics NoteJibril omarNo ratings yet
- Engineering Mechanics EssentialsDocument76 pagesEngineering Mechanics EssentialsGophop HdudNo ratings yet
- Fundamentals of Engineering Mechanics Basic Concepts, Methods and ProblemsDocument6 pagesFundamentals of Engineering Mechanics Basic Concepts, Methods and ProblemsWendell FloresNo ratings yet
- CE 201 Lecture 1 - Chapters (1+ 2) (2.1)Document29 pagesCE 201 Lecture 1 - Chapters (1+ 2) (2.1)Aseily AhmedNo ratings yet
- Lab # 01Document4 pagesLab # 01Waqas AmeenNo ratings yet
- M1-Unit - 2 Civil Introduction 2018-19Document46 pagesM1-Unit - 2 Civil Introduction 2018-19Arjun Sharma VNo ratings yet
- Applied Mechanics Chapter1Document35 pagesApplied Mechanics Chapter1Mohan Babu YadavNo ratings yet
- Introduction To Engineering MechanicsDocument7 pagesIntroduction To Engineering Mechanicsapi-248483124No ratings yet
- Applied Mechanics PDFDocument18 pagesApplied Mechanics PDFSrinivas KandukuriNo ratings yet
- ME1222 - 1. Background & Basic KnowledgeDocument21 pagesME1222 - 1. Background & Basic KnowledgeNidushan NethsaraNo ratings yet
- Structure I FundamentalsDocument26 pagesStructure I FundamentalsDr Ahmed Al-RubaieNo ratings yet
- MODULE 3. Kinetics of ParticlesDocument40 pagesMODULE 3. Kinetics of ParticlesAron H OcampoNo ratings yet
- Fundamental Concepts in MechanicsDocument48 pagesFundamental Concepts in MechanicsChristine MalibiranNo ratings yet
- Final 1019w06 PDFDocument11 pagesFinal 1019w06 PDFamir moghaddamNo ratings yet
- IntegratorDocument3 pagesIntegratortapan_dassNo ratings yet
- Full Mock-3 Olevel-Paper-4 Final SourceDocument10 pagesFull Mock-3 Olevel-Paper-4 Final SourceDewan Olin ChotepadaeNo ratings yet
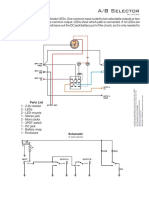
- A/B Selector: Parts ListDocument1 pageA/B Selector: Parts ListGiannis zmNo ratings yet
- Circuit Cellar 354 2020-01Document84 pagesCircuit Cellar 354 2020-01romanNo ratings yet
- Smes - Lab3 - Systemc-TlmDocument3 pagesSmes - Lab3 - Systemc-TlmTulio GaldencioNo ratings yet
- How To Use Intelligent L.C.D.S: Constructional FeatureDocument0 pagesHow To Use Intelligent L.C.D.S: Constructional FeatureNelu Sabie100% (1)
- Gujarati BookDocument3 pagesGujarati BookManuel Antonio Díaz FloresNo ratings yet
- FloodDocument9 pagesFloodapi-352767278No ratings yet
- Periodic table elements in Chinese charactersDocument3 pagesPeriodic table elements in Chinese charactersTheodore HaralabisNo ratings yet
- CDB 4323 Assignment 1Document2 pagesCDB 4323 Assignment 1Muhammad AnwarNo ratings yet
- M.Sc. MATHEMATICS MODEL PAPERDocument22 pagesM.Sc. MATHEMATICS MODEL PAPERRatnesh RanjanNo ratings yet
- Changelog User en PDFDocument136 pagesChangelog User en PDFgrufNo ratings yet
- High Impedance Fault Detection On Rural Electric Distribution and Power Quality Control SystemsDocument4 pagesHigh Impedance Fault Detection On Rural Electric Distribution and Power Quality Control SystemsGerman MonjeNo ratings yet
- Lightweight AP - Registration To WLC PDFDocument15 pagesLightweight AP - Registration To WLC PDFAnasham TegegnNo ratings yet
- XPS Insulation ASTM - C578 - Types PDFDocument1 pageXPS Insulation ASTM - C578 - Types PDFSushil KumarNo ratings yet
- IN Sneddon - The Distribution of Stress in The Neighborhood of A Crack in An Elastic Solid - For Shape Factor QDocument32 pagesIN Sneddon - The Distribution of Stress in The Neighborhood of A Crack in An Elastic Solid - For Shape Factor QShaun Raphael LeeNo ratings yet
- GEOMETRY CH 5 Law of SinesDocument2 pagesGEOMETRY CH 5 Law of SinesJackson LudtkeNo ratings yet
- Sifat Bahan Pangan dan Hasil PertanianDocument39 pagesSifat Bahan Pangan dan Hasil PertanianStefanus Bayu Sindhu WijayaNo ratings yet
- Raynoise Manual Rn31Document377 pagesRaynoise Manual Rn31Jay JayNo ratings yet
- HabilitationDocument186 pagesHabilitationAland MediaNo ratings yet
- Karmaveer Bhaurao Patil Polytechnic, Satara: Control ActionsDocument104 pagesKarmaveer Bhaurao Patil Polytechnic, Satara: Control Actionsmohammd imran azizNo ratings yet
- ChemistryDocument84 pagesChemistryMaria Regina SantosNo ratings yet
- Data For Tightening Torque: LubricantDocument5 pagesData For Tightening Torque: LubricantAtanasio PerezNo ratings yet
- Troubleshooting and Preventive Maintenance of Hydraulic Systems - Al SmileyDocument100 pagesTroubleshooting and Preventive Maintenance of Hydraulic Systems - Al SmileyStarchyLittleOleMeNo ratings yet
- Week 5 Lecture Pigeonhole Principle 1Document58 pagesWeek 5 Lecture Pigeonhole Principle 1CODING with ASAD.No ratings yet
- Fluid Mechanics EXERCHAP05Document4 pagesFluid Mechanics EXERCHAP05scribdgggNo ratings yet
- Cambridge International AS & A Level: PHYSICS 9702/42Document24 pagesCambridge International AS & A Level: PHYSICS 9702/42Công Phạm BáNo ratings yet
- Introduction To Pillar DiagramsDocument17 pagesIntroduction To Pillar DiagramsA. Johan (AJ)No ratings yet