You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Transmitters: Presented by G Kiran Kumar (210115019) Mayank Shukla (210115020)Document29 pagesTransmitters: Presented by G Kiran Kumar (210115019) Mayank Shukla (210115020)Sunil GiriNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Signal Conditioning Operations GuideDocument34 pagesSignal Conditioning Operations GuidemathewosNo ratings yet
- Pertemuan-12 Transmisi SinyalDocument23 pagesPertemuan-12 Transmisi SinyalDery DewantaraNo ratings yet
- Precision Power Analyzer: 1 To 8 Channels DC - 10 MHZ Accuracy 0.025 %Document12 pagesPrecision Power Analyzer: 1 To 8 Channels DC - 10 MHZ Accuracy 0.025 %tsampouriseNo ratings yet
- Electronic Instrumentation & Control SystemsDocument54 pagesElectronic Instrumentation & Control SystemsshahnawazuddinNo ratings yet
- UNIT 3_Part 3_NotesDocument15 pagesUNIT 3_Part 3_NotesmourjyasanyNo ratings yet
- 53 36765 ME591 2012 1 1 1 Analog Signal ConditionningDocument58 pages53 36765 ME591 2012 1 1 1 Analog Signal ConditionningAbhishek KumbalurNo ratings yet
- Module 4Document38 pagesModule 4sowbarnikaganesh17No ratings yet
- Chapter 5 - Data Acquisition Systems May 21 PMRDocument51 pagesChapter 5 - Data Acquisition Systems May 21 PMRGeleta BekeleNo ratings yet
- Lec 4 - Electrical Indicating and Test Instruments-3Document67 pagesLec 4 - Electrical Indicating and Test Instruments-3Mani KhanNo ratings yet
- 4 To 20 Ma Transmitter WorkingDocument7 pages4 To 20 Ma Transmitter WorkingVenkata Suresh MandavaNo ratings yet
- Boolean Algebra & Signal ConditioningDocument59 pagesBoolean Algebra & Signal Conditioningnaughty dela cruzNo ratings yet
- Measurement Sensors and InstrumentDocument60 pagesMeasurement Sensors and InstrumentKarthik MathavenNo ratings yet
- 3 CO 5 Digital InstDocument58 pages3 CO 5 Digital InstRashmika MurugeshanNo ratings yet
- Unit 4Document24 pagesUnit 4Rohit RathodNo ratings yet
- Lab Report Temperature TransmitterDocument12 pagesLab Report Temperature Transmitterathira sNo ratings yet
- School of Electronics and Communication Engineering B.TECH (2018-2019) VII SemesterDocument28 pagesSchool of Electronics and Communication Engineering B.TECH (2018-2019) VII SemesterVikas BhatiNo ratings yet
- Basics of 4-20ma Current LoopDocument7 pagesBasics of 4-20ma Current LoopsandystaysNo ratings yet
- Unit 4 NotesDocument9 pagesUnit 4 NotesPrathamesh BhavsarNo ratings yet
- Measurement of Current With A Voltage DAQDocument3 pagesMeasurement of Current With A Voltage DAQKh SabNo ratings yet
- Process Transmitters Voltage and Power Requirements in A Two-Wire 4 - 20ma Current Loop Learning Instrumentation and Control EngineeringDocument4 pagesProcess Transmitters Voltage and Power Requirements in A Two-Wire 4 - 20ma Current Loop Learning Instrumentation and Control EngineeringNGASSAKI ATONGUI Christ HubertNo ratings yet
- Current SensingDocument4 pagesCurrent SensingrahulshtyNo ratings yet
- How A 4-20 Ma Transmitter WorksDocument3 pagesHow A 4-20 Ma Transmitter WorksVraja KisoriNo ratings yet
- Transmitter and Smart TransmitterDocument57 pagesTransmitter and Smart TransmitterBHAGSEN PARVATNo ratings yet
- Signals and SystemsDocument59 pagesSignals and SystemsArvind BhosaleNo ratings yet
- Lecture 4A SignalConditioning DCBRIDGE SVDocument48 pagesLecture 4A SignalConditioning DCBRIDGE SVFazdrul AkiffNo ratings yet
- SRLDC Data CommDocument48 pagesSRLDC Data CommAmit BiswasNo ratings yet
- Digital Multimeters - Basics of Structure and OperationDocument13 pagesDigital Multimeters - Basics of Structure and Operationsardornozimov2000No ratings yet
- Railway Current Voltage TransducersDocument25 pagesRailway Current Voltage TransducersThasnimFathimaNo ratings yet
- Power System TransientsDocument36 pagesPower System Transientsgokul_iyer2001No ratings yet
- Digital Multimeters - Basic GuideDocument23 pagesDigital Multimeters - Basic GuidemithiladeshmukhNo ratings yet
- 2 Wire 3 Wire 4 Wire Transmitter WiringDocument7 pages2 Wire 3 Wire 4 Wire Transmitter WiringSyed HuseinNo ratings yet
- Smart Meters and Advanced Metering InfrastructureDocument41 pagesSmart Meters and Advanced Metering InfrastructureBhuvanapriyan SNo ratings yet
- Unit-I: Microwave ComponenetsDocument238 pagesUnit-I: Microwave Componenetspradnya patilNo ratings yet
- LMG500 8-Channel Precision Power MeterDocument12 pagesLMG500 8-Channel Precision Power MeterJuan Carlos Añazco PazosNo ratings yet
- EMC 201 - Signal Conditioning and Op-Amp CircuitsDocument118 pagesEMC 201 - Signal Conditioning and Op-Amp CircuitsMuhammad Adib HaikalNo ratings yet
- Lec 6 - Variable Conversion Elements - 3Document79 pagesLec 6 - Variable Conversion Elements - 3Mani KhanNo ratings yet
- Sensor Technology: Types, Working & ApplicationsDocument21 pagesSensor Technology: Types, Working & ApplicationsVISHAL MUKUNDANNo ratings yet
- Fundamentals of Mechatronics Measurement SystemsDocument51 pagesFundamentals of Mechatronics Measurement SystemsKassimNo ratings yet
- Intro Process Xmitters (Suresh)Document33 pagesIntro Process Xmitters (Suresh)sreeyukthaNo ratings yet
- Signal Conditioning FundamentalsDocument10 pagesSignal Conditioning Fundamentalsregassa rajiNo ratings yet
- Introduction to Lab Equipment FunctionsDocument10 pagesIntroduction to Lab Equipment Functionsdani chNo ratings yet
- 4-20ma Current LoopsDocument7 pages4-20ma Current LoopsRavi BiradarNo ratings yet
- Lab Manual Electronics EngineeringDocument67 pagesLab Manual Electronics EngineeringMuhammad Anas ToheedNo ratings yet
- Training Report On Study of 33/11KV MV Substations at APDCL (Assam Power Distribution Corporation LTD.)Document16 pagesTraining Report On Study of 33/11KV MV Substations at APDCL (Assam Power Distribution Corporation LTD.)KAZI SAHARIAR RAHI100% (1)
- Fault Detection in TM LineDocument25 pagesFault Detection in TM Linenaveen gNo ratings yet
- Assignment of Measurements and InstrumentationDocument8 pagesAssignment of Measurements and InstrumentationAmna AamirNo ratings yet
- Chapter 5 Signal ConditioningDocument70 pagesChapter 5 Signal ConditioningAkramNo ratings yet
- A Review On Various Transformer Testing SystemsDocument4 pagesA Review On Various Transformer Testing Systemsijsret100% (1)
- Electrical Test and Instrument ToolsDocument28 pagesElectrical Test and Instrument Toolsmustafa1989ocNo ratings yet
- RF Power Measurements Basic PrinciplesDocument27 pagesRF Power Measurements Basic PrinciplesHector Velasco100% (1)
- Electronic Analog MetersDocument25 pagesElectronic Analog MetersAbhinav GuptaNo ratings yet
- 2.Dpps Module IIDocument93 pages2.Dpps Module IIAshley SureshNo ratings yet
- Basics of Electrical EngineeringDocument100 pagesBasics of Electrical Engineeringdeep voraNo ratings yet
- 5988 5511enDocument8 pages5988 5511enthangaraj_icNo ratings yet
- Ee314 Electrical Instrumentation and Measurements: Chapter 3 - Analog Recording InstrumentsDocument41 pagesEe314 Electrical Instrumentation and Measurements: Chapter 3 - Analog Recording Instrumentsseeb19No ratings yet
- Power System Protection & Recent Trends by JDM - LatestDocument152 pagesPower System Protection & Recent Trends by JDM - Latestraajesh692% (12)
- Easygen - Exciter-10: Salient FeaturesDocument4 pagesEasygen - Exciter-10: Salient FeaturesAbdallah AbdelrehimNo ratings yet
- Intro to OS FunctionsDocument7 pagesIntro to OS FunctionsAnum Abdul SalamNo ratings yet
- Sony Str-De915, Ta-V909, Ve910 Service Manual Ver 1.2 2003.07 (9-920-940-13)Document56 pagesSony Str-De915, Ta-V909, Ve910 Service Manual Ver 1.2 2003.07 (9-920-940-13)Alvaro Santos100% (1)
- PRP TutorialDocument0 pagesPRP TutorialsuudonNo ratings yet
- Electrical LibraryDocument355 pagesElectrical LibraryRubén Blanco CarreraNo ratings yet
- Hitachi L46S604 L55S604Document114 pagesHitachi L46S604 L55S604Edilberto AvilaNo ratings yet
- Panasonic Corporation.119432Document118 pagesPanasonic Corporation.119432aaaa0% (1)
- Design and Implementation of Air Mouse Using Accelerometer SensorDocument3 pagesDesign and Implementation of Air Mouse Using Accelerometer SensorKesthara VNo ratings yet
- Ferrite Core Datasheet PDFDocument45 pagesFerrite Core Datasheet PDFOnlineShop ShopNo ratings yet
- ASHIDA RMU Automation BrochureDocument3 pagesASHIDA RMU Automation Brochurerahulyadav2121545No ratings yet
- MS2-User Manual FalconDocument19 pagesMS2-User Manual FalconFatmir Enila FerhatiNo ratings yet
- HVDC Valve Testing PDFDocument96 pagesHVDC Valve Testing PDFmohanNo ratings yet
- Workflow Diagrams: For DIT and On Set GradingDocument9 pagesWorkflow Diagrams: For DIT and On Set GradingClaudia MacchiavelloNo ratings yet
- Reyrolle 7PG111 & 7PG112 AR Auxiliary Relay Answers for Energy ProtectionDocument48 pagesReyrolle 7PG111 & 7PG112 AR Auxiliary Relay Answers for Energy Protectionsivaguruk2No ratings yet
- Thermostat W3230: Function Description of W3230Document4 pagesThermostat W3230: Function Description of W3230p_venture100% (1)
- Iot Physical Devices and Endpoints: Bahga & Madisetti, © 2015Document14 pagesIot Physical Devices and Endpoints: Bahga & Madisetti, © 2015Harsha MNo ratings yet
- Mapúa University - Intramuros Last Name: First Name: Middle Name: Student NoDocument5 pagesMapúa University - Intramuros Last Name: First Name: Middle Name: Student NoAldrin SimaraNo ratings yet
- Proximity SensorDocument24 pagesProximity Sensoralevoltage187No ratings yet
- IR Moisture Sensor ManualDocument113 pagesIR Moisture Sensor ManualFachrurroziAs100% (1)
- UEEA1313 Topic 2-Part 2 - LDocument108 pagesUEEA1313 Topic 2-Part 2 - LLife LyricsNo ratings yet
- Examenunidad 7Document2 pagesExamenunidad 7Gabriela Aviles100% (1)
- MTK5659 (FHD Models) AM Service Manual Ver1.0 2018-5-31Document57 pagesMTK5659 (FHD Models) AM Service Manual Ver1.0 2018-5-31MarcosRomano100% (2)
- Ch. 8 - Substation Equipment, Location, and GorundingDocument20 pagesCh. 8 - Substation Equipment, Location, and GorundingMuhammad RiovanzaNo ratings yet
- Signal Operations in The Corps and Army: Department Field Manual WARDocument76 pagesSignal Operations in The Corps and Army: Department Field Manual WARBarry FollandNo ratings yet
- LTE AC Upgrade Site Survey ReportDocument14 pagesLTE AC Upgrade Site Survey ReportEdmar BataqueNo ratings yet
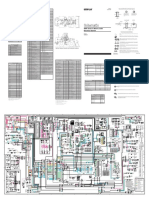
- 980F Loader (5XJ588 Up)Document2 pages980F Loader (5XJ588 Up)NovakurniawanNo ratings yet
- Magnetizing Inrush Phenomena in Transformer BanksDocument9 pagesMagnetizing Inrush Phenomena in Transformer BanksAlejandro Gil RestrepoNo ratings yet
- Chapter - 2 - Jump, Loop and Call InstructionsDocument27 pagesChapter - 2 - Jump, Loop and Call InstructionsJoe HxNo ratings yet
- Sony HCD Ne5 Manual PDFDocument32 pagesSony HCD Ne5 Manual PDFDiego C. FigueroaNo ratings yet
- EUROPEAN INTEGRATED RAILWAY RADIO ENHANCED NETWORK SPECIFICATIONDocument138 pagesEUROPEAN INTEGRATED RAILWAY RADIO ENHANCED NETWORK SPECIFICATIONsaospieNo ratings yet