You might also like
- LOW LEVEL DESIGN (LLD) Ineuron Internship Credit Card Default PredictionDocument11 pagesLOW LEVEL DESIGN (LLD) Ineuron Internship Credit Card Default Predictionswarajkakade83No ratings yet
- Chan, Jamie - Machine Learning With Python For Beginners - A Step-By-Step Guide With Hands-On Projects (Learn Coding Fast With Hands-On Project (2021) - Libgen - LiDocument200 pagesChan, Jamie - Machine Learning With Python For Beginners - A Step-By-Step Guide With Hands-On Projects (Learn Coding Fast With Hands-On Project (2021) - Libgen - LiJoan Petit GrosNo ratings yet
- LTE Handover OptimizationDocument33 pagesLTE Handover Optimizationthang_1986dh100% (3)
- 7 Linearization Jonkman 2013Document11 pages7 Linearization Jonkman 2013rrNo ratings yet
- Algo Chart - OdpDocument19 pagesAlgo Chart - OdpRevi Muharam FadliNo ratings yet
- Capwap: PDCA Professor's Institute June 2011Document44 pagesCapwap: PDCA Professor's Institute June 2011Ένκινουαν Κόγκ Αδάμου100% (1)
- WINSEM2023-24 BECE204L TH VL2023240505623 2024-01-06 Reference-Material-IIIDocument24 pagesWINSEM2023-24 BECE204L TH VL2023240505623 2024-01-06 Reference-Material-IIIpratyakshswamiNo ratings yet
- 03 Neural Network Proxy Modeling of Complex Oil FedutenkoDocument38 pages03 Neural Network Proxy Modeling of Complex Oil Fedutenkobillal_m_aslamNo ratings yet
- Pump Test Run GuidelineDocument7 pagesPump Test Run GuidelineRuthai KomthaisongNo ratings yet
- Concurrent Programiing Tutorial-2Document8 pagesConcurrent Programiing Tutorial-2niku007No ratings yet
- Buy Back Power On Grid Connected Residential PV: By: Clark Darwin M. GozonDocument17 pagesBuy Back Power On Grid Connected Residential PV: By: Clark Darwin M. GozonClark Darwin Masilang GozonNo ratings yet
- 5GMF WP101 11 5G Rat PDFDocument26 pages5GMF WP101 11 5G Rat PDFAvik ModakNo ratings yet
- RADAR Data Cube PDFDocument8 pagesRADAR Data Cube PDFEklavya RathoreNo ratings yet
- N÷Pc×Y: Vohagesi9Document9 pagesN÷Pc×Y: Vohagesi9Matthew ListroNo ratings yet
- CAPWAP Models, Procedures and ParametersDocument32 pagesCAPWAP Models, Procedures and ParametersObaid Ur RehmanNo ratings yet
- Slides Algo-Qsort-Pivot Typed PDFDocument7 pagesSlides Algo-Qsort-Pivot Typed PDFAnonymous PSmNPufgmNo ratings yet
- Capwap PdcaDocument44 pagesCapwap PdcaPungge Prima Huwa100% (1)
- 2011 Hyunjung Park VLDB Map-Reduce, RAMP, Big DataDocument4 pages2011 Hyunjung Park VLDB Map-Reduce, RAMP, Big DataSunil ThaliaNo ratings yet
- SAP PP Certification Overview (Mindmap Edition)Document1 pageSAP PP Certification Overview (Mindmap Edition)Yong BenedictNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- 826 SAR Processing Algorithms Overview-F15Document52 pages826 SAR Processing Algorithms Overview-F15SanhitaGuhaNo ratings yet
- Dl4vslam TalkDocument34 pagesDl4vslam TalkAdam112211No ratings yet
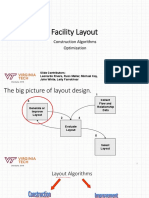
- 19b Facility Layout - Construction Optimization - AnnotatedDocument23 pages19b Facility Layout - Construction Optimization - Annotatedmates4workNo ratings yet
- L7 DetectionDocument54 pagesL7 DetectionAgha KazimNo ratings yet
- GALLOP ISTS2015 SlidesDocument36 pagesGALLOP ISTS2015 SlideshipNo ratings yet
- A Stability/Bifurcation Framework For Process DesignDocument24 pagesA Stability/Bifurcation Framework For Process Designraj1067No ratings yet
- Procssing 01Document81 pagesProcssing 01Djibril Idé AlphaNo ratings yet
- ME L21 RootLocusLagDocument5 pagesME L21 RootLocusLagRezkodaNo ratings yet
- 4th Updated TT - 3Document1 page4th Updated TT - 3Aaa BbbNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- The ORCA Quantum Chemistry Program: A Jump-Start GuideDocument6 pagesThe ORCA Quantum Chemistry Program: A Jump-Start GuideFerzz MontejoNo ratings yet
- 1700-Marc LehmacherDocument1 page1700-Marc LehmacherCristinaGeorgetaPopaNo ratings yet
- Digital Control Systems (DCS) : Lecture-1-2 Lead CompensationDocument61 pagesDigital Control Systems (DCS) : Lecture-1-2 Lead CompensationMeer Zafarullah NoohaniNo ratings yet
- MCES Unit 2 3Document7 pagesMCES Unit 2 3dup acountNo ratings yet
- Instruction Execution: Straight-Line Sequencing and BranchingDocument19 pagesInstruction Execution: Straight-Line Sequencing and BranchingKpsmurugesan Kpsm100% (1)
- 30 TwinCAT NC General ENDocument65 pages30 TwinCAT NC General ENShubham PatilNo ratings yet
- Introduction To Well Testing and Interpretation: WCP1 CourseDocument51 pagesIntroduction To Well Testing and Interpretation: WCP1 Courserabahnali75% (12)
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Offline Time Table IT Dept Sem-II 2021-2022 UpdatedDocument1 pageOffline Time Table IT Dept Sem-II 2021-2022 UpdatedABHIJEET SINGHNo ratings yet
- FHRPDocument1 pageFHRPnightbassNo ratings yet
- 1402 5 16 SA f2 KPI AnalysisDocument20 pages1402 5 16 SA f2 KPI Analysismohsen ahmadzadehNo ratings yet
- Routing Concept: Sirak KaewjamnongDocument45 pagesRouting Concept: Sirak KaewjamnongAjay BarwalNo ratings yet
- File LJZMB PDFDocument3 pagesFile LJZMB PDFTamal ChakrabortyNo ratings yet
- Voip Capacity Analysis in Cognitive Radio System: Howon Lee and Dong-Ho ChoDocument3 pagesVoip Capacity Analysis in Cognitive Radio System: Howon Lee and Dong-Ho ChoTamal ChakrabortyNo ratings yet
- CONWIPDocument17 pagesCONWIPostapNo ratings yet
- 15 Robotics IntroDocument116 pages15 Robotics IntroSuren EzNo ratings yet
- 01 PreprocessingDocument40 pages01 PreprocessingAlex López GutiérrezNo ratings yet
- Molecular Modeling: Conformational Molecular Field Analysis (Comfa)Document40 pagesMolecular Modeling: Conformational Molecular Field Analysis (Comfa)Quty Papa KannaNo ratings yet
- Topsapp ISCE 20160418Document37 pagesTopsapp ISCE 20160418gwisnuNo ratings yet
- Return Instruction, RC, RNC, RP, RM, RZ, RNZ, Rpe, Rpo, RetDocument2 pagesReturn Instruction, RC, RNC, RP, RM, RZ, RNZ, Rpe, Rpo, Retpad pestNo ratings yet
- Introduction To ImmDocument83 pagesIntroduction To ImmAchintya SarkarNo ratings yet
- A Key Theme of CIS 371: ParallelismDocument7 pagesA Key Theme of CIS 371: ParallelismAhuja MeghnaNo ratings yet
- Lec 6Document154 pagesLec 6cheintNo ratings yet
- Introduction To Robotics: Amitabha MukerjeeDocument54 pagesIntroduction To Robotics: Amitabha MukerjeeVaibhav SharmaNo ratings yet
- Experiment 1: Pre-Lab Report: 1) Orcad SimulationDocument19 pagesExperiment 1: Pre-Lab Report: 1) Orcad SimulationasmaaNo ratings yet
- Introduction To Support Vector Machines: BTR Workshop Fall 2006Document88 pagesIntroduction To Support Vector Machines: BTR Workshop Fall 2006Helkia PasaribuNo ratings yet
- High Resolution Wide Swath SAR Imaging With Digital Beamforming - Performance Analysis, Optimization, System DesignDocument5 pagesHigh Resolution Wide Swath SAR Imaging With Digital Beamforming - Performance Analysis, Optimization, System DesignSimone MeschinoNo ratings yet
- Type of Work - CheatsheetDocument18 pagesType of Work - CheatsheetAljon HizonNo ratings yet
- Newnes Guide to Satellite TV: Installation, Reception and RepairFrom EverandNewnes Guide to Satellite TV: Installation, Reception and RepairRating: 5 out of 5 stars5/5 (1)
- Oracle PLSQLDocument344 pagesOracle PLSQLSoumya GeorgeNo ratings yet
- Ajay AnandDocument17 pagesAjay AnandSanjaNo ratings yet
- Far, Near, Huge PointerDocument2 pagesFar, Near, Huge PointerBhavesh KirangeNo ratings yet
- Performance Tuning Tips For Stored ProceduresDocument12 pagesPerformance Tuning Tips For Stored ProceduresVrushal DeshpandeNo ratings yet
- Installing NS2 in Fedora Mate 64 BitDocument4 pagesInstalling NS2 in Fedora Mate 64 BitABD KADIR SALAMNo ratings yet
- Developing With AngularDocument402 pagesDeveloping With AngularAntonioMolina100% (2)
- 8085 BasicsDocument34 pages8085 BasicsPrakash MoorthyNo ratings yet
- Program 14.program To Check Whether An Year Is Leap or Not: OutputDocument32 pagesProgram 14.program To Check Whether An Year Is Leap or Not: OutputBasit AfzalNo ratings yet
- Bods NotesDocument10 pagesBods Notesranjit MNo ratings yet
- How Java WorksDocument11 pagesHow Java WorksMohit GautamNo ratings yet
- Raspberry WiringPiDocument26 pagesRaspberry WiringPiMircea TirziuNo ratings yet
- PROCES-RM002D (Process Library Reference Manual)Document356 pagesPROCES-RM002D (Process Library Reference Manual)Kevin Alberto Tejera PereiraNo ratings yet
- TraceDocument38 pagesTraceAnabel Márquez GilNo ratings yet
- Programming Paradigms PDFDocument10 pagesProgramming Paradigms PDFsssadangi100% (1)
- Create A Simple Servlet Program UsingDocument45 pagesCreate A Simple Servlet Program Usingalok kumarNo ratings yet
- C, C++Document15 pagesC, C++Kaleem UllahNo ratings yet
- Optimization Toolbox: User's GuideDocument305 pagesOptimization Toolbox: User's GuideDivungoNo ratings yet
- Programming The Microsoft Windows Driver Model 2nd Edition (001-100)Document100 pagesProgramming The Microsoft Windows Driver Model 2nd Edition (001-100)gaugenNo ratings yet
- SCJ ErrorsDocument14 pagesSCJ ErrorsPatrick VpNo ratings yet
- 70-536 Test Part 2Document102 pages70-536 Test Part 2api-26796793No ratings yet
- Cleaning Data in Python: Pu!ing It All TogetherDocument14 pagesCleaning Data in Python: Pu!ing It All TogetherNourheneMbarekNo ratings yet
- SAP HANA Reference - SQL Error CodesDocument10 pagesSAP HANA Reference - SQL Error CodesARPITA BISWASNo ratings yet
- 1) Predict The Output For The Following CodeDocument7 pages1) Predict The Output For The Following CoderewNo ratings yet
- Computer Science: CATALOG 2019/2020Document9 pagesComputer Science: CATALOG 2019/2020StarNo ratings yet
- Compiler Question BankDocument6 pagesCompiler Question BankRTNo ratings yet
- Lab (3) Session - Diving Into CSRFDocument6 pagesLab (3) Session - Diving Into CSRFMarkNo ratings yet
- BMI Calculator Android StudioDocument7 pagesBMI Calculator Android Studioeonatan.33No ratings yet
- 123 Basic SetDocument12 pages123 Basic SetJoãoMiguelLacRoeheNo ratings yet