You might also like
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Lecture-2 I&PCDocument16 pagesLecture-2 I&PCisrarahmed1103No ratings yet
- Basic Terms in Instrumentation and ControlDocument8 pagesBasic Terms in Instrumentation and ControlImran UnarNo ratings yet
- Class Notes 3Document9 pagesClass Notes 3Aitazaz HassanNo ratings yet
- Chapter 5 - Section B - Non-Numerical SolutionsDocument9 pagesChapter 5 - Section B - Non-Numerical SolutionsNic BlandoNo ratings yet
- PT326Document12 pagesPT326Asok Suthakar50% (2)
- Heat Transfer Example ProblemsDocument8 pagesHeat Transfer Example ProblemsNick PapavizasNo ratings yet
- Thermowell Manual FinalDocument5 pagesThermowell Manual FinalPradeep DiwakarNo ratings yet
- Experiment - 5: Temperature Control in A Mixing-Heating ProcessDocument13 pagesExperiment - 5: Temperature Control in A Mixing-Heating ProcessKalepu Navya ManishaNo ratings yet
- MECH 3040 Heat Transfer Numerical Methods For Conduction ProblemsDocument6 pagesMECH 3040 Heat Transfer Numerical Methods For Conduction ProblemsscrewthejwoNo ratings yet
- CHE+3054S+Multiple+Steady+State+ST+Ver+1+ Print+FriendlyDocument21 pagesCHE+3054S+Multiple+Steady+State+ST+Ver+1+ Print+FriendlynmhatityeNo ratings yet
- Documentation of CCT Diagram CalculationDocument16 pagesDocumentation of CCT Diagram CalculationXimena Mercedez Palacios PortalNo ratings yet
- 1.C.1 Limitations On The Work That Can Be Supplied by A Heat EngineDocument30 pages1.C.1 Limitations On The Work That Can Be Supplied by A Heat EnginekamsNo ratings yet
- Transient Heat Conduction PDFDocument7 pagesTransient Heat Conduction PDFaberraneNo ratings yet
- Lect 35 ADocument17 pagesLect 35 ASaravanan ReddyNo ratings yet
- Notes Class 1Document7 pagesNotes Class 1Aitazaz HassanNo ratings yet
- Lumped Capacitance MethodDocument1 pageLumped Capacitance MethodHany Elsawy AbdelrahmanNo ratings yet
- Unsteady Conduction 19-08-2021 32Document8 pagesUnsteady Conduction 19-08-2021 32Sivani SinghNo ratings yet
- 2 (A) Heat Transfer by Natural ConvectionDocument7 pages2 (A) Heat Transfer by Natural ConvectionKushal singhNo ratings yet
- Foglerp5 5 SolDocument10 pagesFoglerp5 5 Soljohn connor0% (1)
- Bitstream 1780177 PDFDocument15 pagesBitstream 1780177 PDFSebastián Arbeláez LópezNo ratings yet
- Chapter 5 - Section B - Non-Numerical SolutionsDocument9 pagesChapter 5 - Section B - Non-Numerical Solutionslight2618No ratings yet
- Marcet BoilerDocument3 pagesMarcet BoilerMedo Saleh0% (1)
- PDC Lab Manual 2023Document145 pagesPDC Lab Manual 2023srirajgirish7No ratings yet
- Chapter ThreeDocument10 pagesChapter ThreeDiyar NezarNo ratings yet
- Transient AnalysisDocument14 pagesTransient AnalysisAjay YadavNo ratings yet
- Student Slides M5Document13 pagesStudent Slides M5captainhassNo ratings yet
- Helical Coil Heat ExchangerDocument6 pagesHelical Coil Heat ExchangermuralidharanNo ratings yet
- First-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeDocument3 pagesFirst-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeAnand RajNo ratings yet
- Lumped Capacitance ExperimentDocument10 pagesLumped Capacitance ExperimentDorian GreyNo ratings yet
- Entropy ChangeDocument13 pagesEntropy ChangeAhmedAmer1No ratings yet
- The Second Law of Thermodynamics (Continued) (Lecture 05) : - Prashant Uday ManoharDocument28 pagesThe Second Law of Thermodynamics (Continued) (Lecture 05) : - Prashant Uday ManoharHRIDAY MAHESHWARINo ratings yet
- Ex 1Document6 pagesEx 1Kaviya SNo ratings yet
- The E-NTU Method, 250313Document18 pagesThe E-NTU Method, 250313sajni123100% (1)
- Transfer Function Models: Development of Transfer FunctionsDocument16 pagesTransfer Function Models: Development of Transfer Functions李承家No ratings yet
- Other Physical Examples of First-Order System - LEC 5Document12 pagesOther Physical Examples of First-Order System - LEC 5jaja59No ratings yet
- How To Calculate Duty and Surface Area of Heat Ex ChangersDocument7 pagesHow To Calculate Duty and Surface Area of Heat Ex ChangersJohn Obidi100% (2)
- Unsteady State Heat ConductionDocument10 pagesUnsteady State Heat ConductionSashwat Kumar SinghNo ratings yet
- Solutions To Problem Set 5Document6 pagesSolutions To Problem Set 5rc gautamNo ratings yet
- Lumped AnalysisDocument10 pagesLumped AnalysisNitin PatilNo ratings yet
- Thermochimica Acta: Lfa GMBH, 18 Schiuerstrasse, Ulm. D-89077, GermanyDocument12 pagesThermochimica Acta: Lfa GMBH, 18 Schiuerstrasse, Ulm. D-89077, Germanyzhor El hallaouiNo ratings yet
- Stirred Tank HeaterDocument34 pagesStirred Tank HeaterIman Haerudin100% (1)
- ExerciseDocument4 pagesExerciseAske-alstrupNo ratings yet
- Extended Surface FinsDocument31 pagesExtended Surface FinsEn Csak100% (1)
- Introduction To Finite Volume Method: 3.1 The Basic TechniqueDocument6 pagesIntroduction To Finite Volume Method: 3.1 The Basic TechniqueJitesh HemjiNo ratings yet
- Unit 8 Heating and Cooling of Electric MotorsDocument20 pagesUnit 8 Heating and Cooling of Electric Motorsbahaasweidan02No ratings yet
- 10.3 The Steady State: 92 The Thermal Diffusion EquationDocument2 pages10.3 The Steady State: 92 The Thermal Diffusion EquationNandNNo ratings yet
- AN569/D Transient Thermal Resistance - General Data and Its UseDocument16 pagesAN569/D Transient Thermal Resistance - General Data and Its UseMarcelo GalasNo ratings yet
- Discrete-Time Evaluation of The Time Response: AppendixDocument6 pagesDiscrete-Time Evaluation of The Time Response: AppendixAnonymous WkbmWCa8MNo ratings yet
- Lecture #6 - Chapter 6Document56 pagesLecture #6 - Chapter 6Gregory MacLeodNo ratings yet
- Chapter ThreeDocument9 pagesChapter ThreeDiyar NezarNo ratings yet
- Erbao Lu and Chenghan HeDocument5 pagesErbao Lu and Chenghan HeAbdul HalimNo ratings yet
- Differential Energy Balance For A BarDocument6 pagesDifferential Energy Balance For A BarAlejandro Castillo VélezNo ratings yet
- Temperature ControlDocument15 pagesTemperature Controlendang dian lestariNo ratings yet
- Work - +: Net Per Mass TJ) )Document1 pageWork - +: Net Per Mass TJ) )Catur Dedy PamungkasNo ratings yet
- محاضرة رقم 14Document3 pagesمحاضرة رقم 14دريد فاضلNo ratings yet
- Assignment N0#2Document2 pagesAssignment N0#2waleed infoNo ratings yet
- Two-Stage Analysis For All Flexible Structures On Top of A Rigid Base StructuresDocument6 pagesTwo-Stage Analysis For All Flexible Structures On Top of A Rigid Base StructuresVũ Ngọc ThịnhNo ratings yet
- Lecture - 1 Introduction - To - Engg. - Geology - SeismologyDocument74 pagesLecture - 1 Introduction - To - Engg. - Geology - SeismologyNazim ur rehmanNo ratings yet
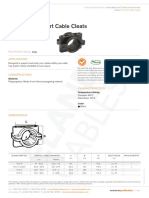
- Two Part Cable CleatsDocument1 pageTwo Part Cable Cleatssaghaee.rezaNo ratings yet
- Yuzik Jesse 202001 MSCDocument130 pagesYuzik Jesse 202001 MSCLong An ĐỗNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document14 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768whmidi7331No ratings yet
- 2 GasesDocument51 pages2 Gasesnirvanjain212007No ratings yet
- Soil Mechanics and Foundations - (Chapter 10 Shear Strength of Soils) PDFDocument63 pagesSoil Mechanics and Foundations - (Chapter 10 Shear Strength of Soils) PDFFrancisco Reyes0% (1)
- Creation Pro-2020Document2 pagesCreation Pro-2020Owais AhmedNo ratings yet
- ETEA Solved Papers 2006-2015Document123 pagesETEA Solved Papers 2006-2015Muhammad Nawaz Khan Abbasi88% (40)
- Composite and Inverse FunctionsDocument24 pagesComposite and Inverse Functions52064No ratings yet
- Tma, MPH-005 (2023-24)Document4 pagesTma, MPH-005 (2023-24)AmleshNo ratings yet
- Remote Sensing and GisDocument86 pagesRemote Sensing and GisLeandra CyntjeNo ratings yet
- EEC Different Types of Electrical Wiring DiagramsDocument11 pagesEEC Different Types of Electrical Wiring Diagramsyash JadhaoNo ratings yet
- Viscolam PS 202 - en 2019Document1 pageViscolam PS 202 - en 2019Duodo NguyenNo ratings yet
- X20 Lightweight Proximity SuitDocument2 pagesX20 Lightweight Proximity SuitwulanNo ratings yet
- Circuits WorksheetDocument4 pagesCircuits WorksheetDrexel DalaygonNo ratings yet
- Applying The Taguchi Method On An EDM MachineDocument5 pagesApplying The Taguchi Method On An EDM Machinechirag kolambeNo ratings yet
- Cambridge IGCSE Mathematics - Core & Extended, 3rd EditionDocument511 pagesCambridge IGCSE Mathematics - Core & Extended, 3rd EditionAnderson Alfred86% (21)
- Concentration Expressions Serial DilutionDocument34 pagesConcentration Expressions Serial DilutionBlessy MartinNo ratings yet
- Writing Assignment 2 - TelescopesDocument2 pagesWriting Assignment 2 - TelescopesannaNo ratings yet
- How Do Satellites WorkDocument12 pagesHow Do Satellites Workizaias jrNo ratings yet
- As 5100.6-2017 Steel and Composite ConstructionDocument337 pagesAs 5100.6-2017 Steel and Composite ConstructiontracyhopyNo ratings yet
- Prediction of The Stability of Meropenem in Intravenous Mixtures (2015)Document7 pagesPrediction of The Stability of Meropenem in Intravenous Mixtures (2015)Sonie SoniquezNo ratings yet
- Fabric Brochure Letter Rev2 Web PDFDocument28 pagesFabric Brochure Letter Rev2 Web PDFMoamenNo ratings yet
- Aw 1006 TDocument17 pagesAw 1006 TJohnNo ratings yet
- Power Systems Analysis - Bee 21 & Bew 21Document3 pagesPower Systems Analysis - Bee 21 & Bew 21zy44cwfjjgNo ratings yet
- Hydraulic Design of Road-Edge Surface Water Channels: StandardsDocument40 pagesHydraulic Design of Road-Edge Surface Water Channels: Standardsdiana cristina arias aldanaNo ratings yet
- Design Proposal and Optimization Potential For An Electric Drive Motor in A 50 PAX Hybrid-Electric Regional Aircraft ApplicationDocument9 pagesDesign Proposal and Optimization Potential For An Electric Drive Motor in A 50 PAX Hybrid-Electric Regional Aircraft ApplicationAlfred PedersendsNo ratings yet
- UT Outline Training LV IIIDocument4 pagesUT Outline Training LV IIITrung Tinh HoNo ratings yet