You might also like
- Week 3: Friction & GravityDocument15 pagesWeek 3: Friction & Gravitykathleenjane100% (1)
- Begg's and Tip Edge PhilosophyDocument74 pagesBegg's and Tip Edge PhilosophyNeel Lalmani MauryaNo ratings yet
- Balanced Scorecard Slide 1: MBT TechniqueDocument320 pagesBalanced Scorecard Slide 1: MBT Techniqueshyama pramodNo ratings yet
- Biomechanics of Space ClosureDocument46 pagesBiomechanics of Space ClosureDr. Abdulsalam Awas Dental Center50% (2)
- Space Closure by AlmuzianDocument16 pagesSpace Closure by AlmuzianNizam MuhamadNo ratings yet
- Orthodontia Notes by Dr. RounikDocument22 pagesOrthodontia Notes by Dr. RounikRounik TalukdarNo ratings yet
- Ansi S2-42 PDFDocument40 pagesAnsi S2-42 PDFAndres Antonio Moreno CastroNo ratings yet
- Fixed Functional Appliances - BiomechanicsDocument96 pagesFixed Functional Appliances - BiomechanicsBimalKrishnaNo ratings yet
- MBTDocument65 pagesMBTdangi.ishu29No ratings yet
- TorqueDocument24 pagesTorqueRohit Sharma100% (5)
- Sec5 MS-700 Wellhead SystemDocument56 pagesSec5 MS-700 Wellhead SystemDonald StraubNo ratings yet
- Refined Begg TechniqueDocument137 pagesRefined Begg Techniquejohn suryavardhanNo ratings yet
- Space Closure Using Frictionless MechanicsDocument11 pagesSpace Closure Using Frictionless MechanicsLisbethNo ratings yet
- Removable Orthodontic Appliances ANALHAQ Class For 3rd Year BDSDocument72 pagesRemovable Orthodontic Appliances ANALHAQ Class For 3rd Year BDSAnalhaq ShaikhNo ratings yet
- Seminars in Orthodontics Self Ligating Brackets1890Document40 pagesSeminars in Orthodontics Self Ligating Brackets1890Lamar Mohamed100% (3)
- Intrusion MechanicsDocument31 pagesIntrusion Mechanicsaa bbNo ratings yet
- Pricippriles of Intramedullary NailingDocument57 pagesPricippriles of Intramedullary NailingAbdallah OmerNo ratings yet
- Pendulum ApplianceDocument73 pagesPendulum ApplianceEmad Ahmad Anis0% (1)
- Brackets IN ORTHODONTICSDocument122 pagesBrackets IN ORTHODONTICSMohammed Hussain80% (5)
- APMO Problem Ans Solution PDFDocument213 pagesAPMO Problem Ans Solution PDFS.M.A NahianNo ratings yet
- Edgewise AppDocument27 pagesEdgewise AppReshamIrshadNo ratings yet
- Ilizarov Fixator: DR Pratik AgarwalDocument86 pagesIlizarov Fixator: DR Pratik AgarwaltesfahuntekletilahunNo ratings yet
- Frictionless Mechanics SeminarDocument124 pagesFrictionless Mechanics Seminarobula reddyNo ratings yet
- Biomechanics and Use of Loops in OrthodonticsDocument70 pagesBiomechanics and Use of Loops in OrthodonticsSushma Dhiman75% (24)
- Daf Xf95 Series Workshop ManualDocument20 pagesDaf Xf95 Series Workshop Manualwilliam100% (51)
- Arch Wire:: Begg'S Appliances Introduced by Dr. PRA Begg in 1950Document7 pagesArch Wire:: Begg'S Appliances Introduced by Dr. PRA Begg in 1950Padma PanniNo ratings yet
- Herbst ApplianceDocument36 pagesHerbst ApplianceSakthi Priya100% (5)
- Tip Edge Technique: P. John PG StudentDocument112 pagesTip Edge Technique: P. John PG Studentjohn suryavardhanNo ratings yet
- Utility ArchesDocument2 pagesUtility ArchesDevanand Gupta67% (3)
- V-Bend and Anchorage in Orthodontics: Mehak Arya Iyrmds Dept of OrthodonticsDocument37 pagesV-Bend and Anchorage in Orthodontics: Mehak Arya Iyrmds Dept of OrthodonticsMehak AryaNo ratings yet
- Tip Edge Orthodontics OriginaDocument102 pagesTip Edge Orthodontics OriginaRaj Singh100% (3)
- Pedagogy Torqunig AuxillariesDocument39 pagesPedagogy Torqunig AuxillariesGudiyA KaurNo ratings yet
- Bows & RetractorsDocument53 pagesBows & RetractorsSri RengalakshmiNo ratings yet
- Pace Closure: Prepared By: Sarah QasimDocument55 pagesPace Closure: Prepared By: Sarah QasimThuyNo ratings yet
- Space Closure: K .Lavanya IiyrpgDocument162 pagesSpace Closure: K .Lavanya IiyrpgNeelima ChandranNo ratings yet
- Removable AppliancesDocument80 pagesRemovable AppliancesSurabhi SaxenaNo ratings yet
- TranslateDocument3 pagesTranslatenurulhidayahfkgNo ratings yet
- Newer Orthodontic Arch WiresDocument81 pagesNewer Orthodontic Arch WiresMothi Krishna100% (1)
- Spineinstrumentation 220325073013Document98 pagesSpineinstrumentation 220325073013Anwer YahyaNo ratings yet
- SpringsDocument12 pagesSpringssangei2093No ratings yet
- Alexanders Vari Simplex DisciplineDocument86 pagesAlexanders Vari Simplex DisciplinevelangniNo ratings yet
- AMSM Module 4Document27 pagesAMSM Module 4Shaji EtNo ratings yet
- KLoop Molar Distalizing AppDocument7 pagesKLoop Molar Distalizing AppAngie Römer HaroNo ratings yet
- Principle of NailingDocument62 pagesPrinciple of Nailingsharvindan subramaniamNo ratings yet
- Design of Helical SpringsDocument60 pagesDesign of Helical SpringsKelvin Kindice MapurisaNo ratings yet
- Experiment 1: Extension of Spring: Program Kejuruteraan Mekanikal Fakulti Industri KejuruteraanDocument3 pagesExperiment 1: Extension of Spring: Program Kejuruteraan Mekanikal Fakulti Industri KejuruteraanmrsmartguysNo ratings yet
- Springs: Shammy Kumar Assistant Professor Department of Mechanical Engg. SRM University, CHENNAIDocument25 pagesSprings: Shammy Kumar Assistant Professor Department of Mechanical Engg. SRM University, CHENNAIAshish SinghNo ratings yet
- SpringsDocument21 pagesSpringsPrajwalNo ratings yet
- Finishing Stage Part 2Document132 pagesFinishing Stage Part 2sahar emadNo ratings yet
- Pre Adjusted Edgewise ApplianceDocument34 pagesPre Adjusted Edgewise ApplianceatikaNo ratings yet
- Ananlysis of Two Pinned and Three Pinned ArchesDocument25 pagesAnanlysis of Two Pinned and Three Pinned Archesshubham maviNo ratings yet
- ME374 - Module 4 (Updated)Document36 pagesME374 - Module 4 (Updated)VinNo ratings yet
- LABIAL BOW - PPTX - 20240327 - 231313 - 0000Document33 pagesLABIAL BOW - PPTX - 20240327 - 231313 - 0000bavyas13No ratings yet
- Alexanders Vari Simplex DisciplineDocument86 pagesAlexanders Vari Simplex DisciplineMichaelNo ratings yet
- Rigging&Slinging SafetyDocument170 pagesRigging&Slinging SafetyAlonso DIAZNo ratings yet
- DME Unit 5 Springs PDFDocument51 pagesDME Unit 5 Springs PDFsachinroy8638No ratings yet
- The Anchorage Bend in The Begg TechniqueDocument7 pagesThe Anchorage Bend in The Begg TechniqueSyed Mohammad Osama AhsanNo ratings yet
- Stresses in Power ScrewDocument9 pagesStresses in Power ScrewGauravNo ratings yet
- Spaceclosurebyfrictionlessmechanics2 140303231146 Phpapp01Document109 pagesSpaceclosurebyfrictionlessmechanics2 140303231146 Phpapp01Nadia YactayoNo ratings yet
- Chaconas1984 PDFDocument4 pagesChaconas1984 PDFdrzana78No ratings yet
- Removable Orthodontics Appliances Springs, Screws and ElasticsDocument16 pagesRemovable Orthodontics Appliances Springs, Screws and ElasticsSrijan SinghNo ratings yet
- Attachments & Auxiliaries in Begg's TechniqueDocument117 pagesAttachments & Auxiliaries in Begg's TechniqueswapniljunnarkarNo ratings yet
- LV and MV Construction StandardsDocument23 pagesLV and MV Construction StandardssemajamesNo ratings yet
- Engineering Physics Laboratory: Course ObjectivesDocument3 pagesEngineering Physics Laboratory: Course ObjectivesNaveenraj NNo ratings yet
- Hardness Conversion For Hard MaterialsDocument3 pagesHardness Conversion For Hard MaterialsfiloktimonNo ratings yet
- Math 2263 - HW1Document2 pagesMath 2263 - HW1cemaliNo ratings yet
- DSE Chem Last MinuteDocument61 pagesDSE Chem Last Minute何卓函No ratings yet
- Thermal 2 2015Document15 pagesThermal 2 2015Kurnia Perdana PangestikaNo ratings yet
- Csir-Summer Research Training Program (CSIR-SRTP) 2020Document7 pagesCsir-Summer Research Training Program (CSIR-SRTP) 2020adityamduttaNo ratings yet
- Gea Product Catalogue Barn Technology Farm Equipment en - tcm11 39660Document59 pagesGea Product Catalogue Barn Technology Farm Equipment en - tcm11 39660Jose Manuel Pereira LópezNo ratings yet
- MN Sample IC DrawingsDocument4 pagesMN Sample IC DrawingsSAEL SOLARNo ratings yet
- Tantalum: Arihant Jain 6 PeriodDocument7 pagesTantalum: Arihant Jain 6 PeriodbudyNo ratings yet
- 4 Energy Control ProceduresDocument7 pages4 Energy Control ProceduresFriday IjokgwungNo ratings yet
- AX6611 10 SZ61 SZ51 Inst EDocument28 pagesAX6611 10 SZ61 SZ51 Inst EMostafa MekaweyNo ratings yet
- 5666 01Document18 pages5666 01Laura MarquezNo ratings yet
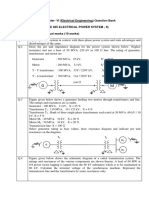
- BE Semester-VI (Electrical Engineering) Question Bank (E 605 Electrical Power System - Ii) All Questions Carry Equal Marks (10 Marks)Document5 pagesBE Semester-VI (Electrical Engineering) Question Bank (E 605 Electrical Power System - Ii) All Questions Carry Equal Marks (10 Marks)Adesh Bhortakke100% (1)
- (Total 1 Mark) : IB Questionbank Physics 1Document8 pages(Total 1 Mark) : IB Questionbank Physics 1Romeo SiriguNo ratings yet
- GearboxDocument3 pagesGearboxVitthal GawhaleNo ratings yet
- Module 2 Ele PDFDocument38 pagesModule 2 Ele PDFRif RizNo ratings yet
- Applications of Equations of StateDocument17 pagesApplications of Equations of StateJatin RamboNo ratings yet
- Breakdown Voltage Measurement in Insulating Oil of Transformer According To IEC StandardsDocument10 pagesBreakdown Voltage Measurement in Insulating Oil of Transformer According To IEC StandardsVenkataramanan SNo ratings yet
- Analysis of PV Modules by Electroluminescence and Ir ThermographyDocument5 pagesAnalysis of PV Modules by Electroluminescence and Ir ThermographyReham El-tuhamyNo ratings yet
- Erosolve Flashing - Customer Presentation - V1Document27 pagesErosolve Flashing - Customer Presentation - V1Nyoman RakaNo ratings yet
- ANSI/TIA 568-C.3: Optical Fiber Cabling Components StandardDocument19 pagesANSI/TIA 568-C.3: Optical Fiber Cabling Components Standardkg38No ratings yet
- Panasonic Kx-tg2361 SMDocument40 pagesPanasonic Kx-tg2361 SMReza AranNo ratings yet
- Invertek P2 Advanced GuideDocument73 pagesInvertek P2 Advanced GuideAri SutejoNo ratings yet
- Electronic Devices Lab - Exp - 9 - Student - Manual (Summer 18-19)Document3 pagesElectronic Devices Lab - Exp - 9 - Student - Manual (Summer 18-19)MD MONIM ISLAMNo ratings yet
- 03 - Additives For Construction SystemsDocument74 pages03 - Additives For Construction SystemsAmit MahajanNo ratings yet
- Article in 05Document8 pagesArticle in 05Noureddine BourasNo ratings yet