You might also like
- 4l80e Teardown Rebuild and InstallationDocument146 pages4l80e Teardown Rebuild and Installationobx4ever50% (2)
- RISK ASESSMENT For SKYLIGHTDocument23 pagesRISK ASESSMENT For SKYLIGHTadeoye Adeyemi100% (1)
- CNC AutomationDocument19 pagesCNC Automationsameersaurabh5No ratings yet
- Guide To ISO50001 PDFDocument43 pagesGuide To ISO50001 PDFJohn Rajesh67% (3)
- Production Flow AnalysisDocument24 pagesProduction Flow AnalysisSelva Shri NathNo ratings yet
- Accident Avoiding of Punching Machine - ReportDocument38 pagesAccident Avoiding of Punching Machine - ReportPrathmeshBhokari0% (1)
- Timber-framed homes guideDocument44 pagesTimber-framed homes guideMtkNo ratings yet
- Tata Steel Corporate PresentationDocument49 pagesTata Steel Corporate Presentationjyoti mahajanNo ratings yet
- Unit 5 MCQDocument9 pagesUnit 5 MCQDhanesh PawarNo ratings yet
- Electronic Payment Systems Security and Protocols ExplainedDocument36 pagesElectronic Payment Systems Security and Protocols ExplainedPaksmilerNo ratings yet
- How To Upload PsDocument16 pagesHow To Upload Psrohan sharmaNo ratings yet
- CNC NotesDocument21 pagesCNC NotesradhiostrokesNo ratings yet
- Design and Implementation of 3 Axis Linear Interpolation Controller in Fpga For CNC Machines and RoboticsDocument11 pagesDesign and Implementation of 3 Axis Linear Interpolation Controller in Fpga For CNC Machines and RoboticsIAEME Publication100% (1)
- Human Computer Interaction: Iv/Ii SemesterDocument61 pagesHuman Computer Interaction: Iv/Ii SemesterSuresh VanamalaNo ratings yet
- SnifferDocument14 pagesSnifferGangadhar KarriNo ratings yet
- Automatic Traffic Light Control UsingDocument35 pagesAutomatic Traffic Light Control UsingDilyalew DebreworkNo ratings yet
- CSE Lamp Technology ReportDocument15 pagesCSE Lamp Technology Reportphani raghavendraNo ratings yet
- Software Dev Life CycleDocument15 pagesSoftware Dev Life CycledepdneoNo ratings yet
- Smart Memories A Seminar Report: A.Rana Pratap (14761A0506)Document15 pagesSmart Memories A Seminar Report: A.Rana Pratap (14761A0506)Hari KrishNo ratings yet
- FINALGrid Computing Seminar ReportDocument34 pagesFINALGrid Computing Seminar ReportMiraj Kumar100% (3)
- Digital Watermarking PresentationDocument16 pagesDigital Watermarking PresentationNikhil DixitNo ratings yet
- Automatic Paper Cutting Using Geneva MechanismDocument4 pagesAutomatic Paper Cutting Using Geneva MechanismsankaramarayananNo ratings yet
- Smart Dustbin For Smart CityDocument11 pagesSmart Dustbin For Smart CityBommaraju Yogeswar krishna0% (1)
- Development of Four Wheel Steering System For A Car: K. Lohith, Dr. S. R. Shankapal, M. H. Monish GowdaDocument8 pagesDevelopment of Four Wheel Steering System For A Car: K. Lohith, Dr. S. R. Shankapal, M. H. Monish GowdaGaurav PandeyNo ratings yet
- Biological ComputerDocument10 pagesBiological ComputerAnkit MishraNo ratings yet
- Cse Diamond Chip Reportn PDFDocument18 pagesCse Diamond Chip Reportn PDFSanjay Kumar PrajapatiNo ratings yet
- Voice Recognition SystemDocument18 pagesVoice Recognition SystemArun Sharma75% (16)
- Seminar On CNC Machine: Submitted To: Submitted byDocument23 pagesSeminar On CNC Machine: Submitted To: Submitted byFaisal MaqsoodNo ratings yet
- New Seminar ReportDocument20 pagesNew Seminar ReportThockanattu Varkey MathewNo ratings yet
- Government Polytechnic College Nedumangadu: Snapdragon ProcessorsDocument17 pagesGovernment Polytechnic College Nedumangadu: Snapdragon ProcessorspremamohanNo ratings yet
- Pen PlotterDocument24 pagesPen PlotterMridul SethiNo ratings yet
- FDM 3D PrinterDocument23 pagesFDM 3D PrinterYuvraj MarneNo ratings yet
- Design and Fabrication of Prevention Kit For Driving Two Wheeler Without HelmetDocument2 pagesDesign and Fabrication of Prevention Kit For Driving Two Wheeler Without HelmetRajeshNo ratings yet
- Infini BandDocument22 pagesInfini Bandtarunr1No ratings yet
- Blockchain Technology and Its Impact On The Global EconomyDocument3 pagesBlockchain Technology and Its Impact On The Global EconomyIJAR JOURNALNo ratings yet
- What Is CNC Machine - Main Parts, Working, Block DiagramDocument3 pagesWhat Is CNC Machine - Main Parts, Working, Block DiagramShanuOlanikkalNo ratings yet
- Multi Sensor Write Up PaperDocument7 pagesMulti Sensor Write Up PaperTRIAD TECHNO SERVICESNo ratings yet
- Technical Seminar ReportDocument26 pagesTechnical Seminar ReportkrishanbharadwajvNo ratings yet
- Student Smart Identity CardDocument12 pagesStudent Smart Identity Cardkartikey mishraNo ratings yet
- Virtual Retinal Display Seminar Report 2001Document44 pagesVirtual Retinal Display Seminar Report 2001Smiely Ammu100% (1)
- Acs PDFDocument2 pagesAcs PDFAkshay PowarNo ratings yet
- Pune Summer Training ReportDocument34 pagesPune Summer Training ReportGaurav giriNo ratings yet
- Optical Mouse Seminar ReportDocument13 pagesOptical Mouse Seminar Reportkarloss_kark0% (1)
- MANET Seminar Report SummaryDocument28 pagesMANET Seminar Report SummaryDhairav PatelNo ratings yet
- Smart MemoryDocument19 pagesSmart MemoryShabnam AsNo ratings yet
- Computer Integrated Manufacturing Cat 1Document58 pagesComputer Integrated Manufacturing Cat 1Abid YusufNo ratings yet
- DTMF Controlled Robot Without MicrocontrollerDocument4 pagesDTMF Controlled Robot Without MicrocontrollershanofaNo ratings yet
- CAD CAM Unit - 3 PPT-ilovepdf-compressedDocument66 pagesCAD CAM Unit - 3 PPT-ilovepdf-compressedTaha SakriwalaNo ratings yet
- Thesis Packet TracerDocument52 pagesThesis Packet TracerHashmat MohamadNo ratings yet
- Seminar Report On Bluetooth 5Document19 pagesSeminar Report On Bluetooth 5sudhakarreddy jNo ratings yet
- NC, CNC and DNCDocument7 pagesNC, CNC and DNCaqtu12fuc67% (3)
- BASIC DIFFERENCES BETWEEN COUPLINGS, CLUTCHES AND BRAKESDocument41 pagesBASIC DIFFERENCES BETWEEN COUPLINGS, CLUTCHES AND BRAKESKadiyam VijayNo ratings yet
- 07-Fabrication of Mini Hydraulic Pipe ViceDocument3 pages07-Fabrication of Mini Hydraulic Pipe ViceVignesan Mech100% (2)
- Decision Review System (DRS)Document17 pagesDecision Review System (DRS)Dhruv Pawar100% (1)
- RFID Advantages and Disadvantages for Library ManagementDocument6 pagesRFID Advantages and Disadvantages for Library ManagementahmedNo ratings yet
- CAD/CAE Applications in BiomedicineDocument12 pagesCAD/CAE Applications in BiomedicineManoj DhageNo ratings yet
- Ilovepdf Merged PDFDocument24 pagesIlovepdf Merged PDFSumana Sri UdumulaNo ratings yet
- Biometrics PPT FinalDocument19 pagesBiometrics PPT FinalRama SudhaNo ratings yet
- Design and Optimisation of 3 Axis CNC Wood Carving Machine 2Document4 pagesDesign and Optimisation of 3 Axis CNC Wood Carving Machine 2International Journal of Innovative Science and Research Technology100% (1)
- Course Title: Computer Hardware Networking Lab Course Code: Period/Week: 5 Periods/Semester:90 Course ObjectivesDocument1 pageCourse Title: Computer Hardware Networking Lab Course Code: Period/Week: 5 Periods/Semester:90 Course ObjectivesUnaise EkNo ratings yet
- METHOD STUDY FOR COST REDUCTIONDocument68 pagesMETHOD STUDY FOR COST REDUCTIONzakirno19248No ratings yet
- 04 NC CNC & DNC System-1Document23 pages04 NC CNC & DNC System-1Arsa Damara PNo ratings yet
- Office Skill Competencie Needed by Secretaries For Effective Job PerformanceDocument14 pagesOffice Skill Competencie Needed by Secretaries For Effective Job PerformanceJoseph JboyNo ratings yet
- Computer Graphics: Presented By: Yogesh Nagaraj NaikDocument26 pagesComputer Graphics: Presented By: Yogesh Nagaraj Naikಯೋಗೇಶ್ ಪಿNo ratings yet
- Pendolina System For Railway ComfortDocument23 pagesPendolina System For Railway ComfortSmileyNo ratings yet
- Obstacle Avoiding Robot Lab Project ReportDocument27 pagesObstacle Avoiding Robot Lab Project Reportyaswanth yashuNo ratings yet
- CNC ManualDocument49 pagesCNC ManualThiagarajan VenugopalNo ratings yet
- Computer Numerical Control INDRADocument11 pagesComputer Numerical Control INDRAIndra Blue'DuatujuhNo ratings yet
- Fms 1Document32 pagesFms 1saisenthNo ratings yet
- MRP Material Requirements PlanningDocument2 pagesMRP Material Requirements PlanningsaisenthNo ratings yet
- Application of Low Cost Inhibitors To Reduce Rate of Corrosion in Rail Passenger CoachesDocument9 pagesApplication of Low Cost Inhibitors To Reduce Rate of Corrosion in Rail Passenger CoachessaisenthNo ratings yet
- CH 1 and 2 Product Design and Development (#1)Document12 pagesCH 1 and 2 Product Design and Development (#1)VinodVermaNo ratings yet
- PhilosophyDocument1 pagePhilosophysaisenthNo ratings yet
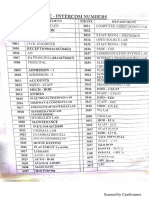
- Intercom Numbers PDFDocument1 pageIntercom Numbers PDFsaisenthNo ratings yet
- Mechanical Department Overview and Future PlansDocument2 pagesMechanical Department Overview and Future PlanssaisenthNo ratings yet
- 5,5 Notes On Routing in ManufacturingDocument2 pages5,5 Notes On Routing in ManufacturingsaisenthNo ratings yet
- 5.2 Notes On Production CycleDocument2 pages5.2 Notes On Production CyclesaisenthNo ratings yet
- Application of Low Cost Inhibitors To Reduce Rate of Corrosion in Rail Passenger CoachesDocument9 pagesApplication of Low Cost Inhibitors To Reduce Rate of Corrosion in Rail Passenger CoachessaisenthNo ratings yet
- 8 Assignment QP Key Sample ScriptDocument10 pages8 Assignment QP Key Sample ScriptsaisenthNo ratings yet
- Request To Send PapersDocument1 pageRequest To Send PaperssaisenthNo ratings yet
- Academic Calender 2018-19-To Hods (6484)Document10 pagesAcademic Calender 2018-19-To Hods (6484)saisenthNo ratings yet
- 12 WorkstationdesignDocument31 pages12 WorkstationdesignsaisenthNo ratings yet
- Saveetha School of Engineering Automobile Engineering Credit SystemDocument112 pagesSaveetha School of Engineering Automobile Engineering Credit SystemsaisenthNo ratings yet
- CamScanner App Scans Documents EasilyDocument2 pagesCamScanner App Scans Documents EasilysaisenthNo ratings yet
- Asper School of Business 9.613 Using Information Technology Part-Time MBA, December 2001 Instructor: Bob TravicaDocument13 pagesAsper School of Business 9.613 Using Information Technology Part-Time MBA, December 2001 Instructor: Bob TravicasaisenthNo ratings yet
- 12 WorkstationdesignDocument31 pages12 WorkstationdesignsaisenthNo ratings yet
- Me2252 MT1 Unit1Document23 pagesMe2252 MT1 Unit1saisenthNo ratings yet
- 2 Casting FormingDocument56 pages2 Casting FormingMohana KrishnanNo ratings yet
- Cellular Manufacturing Systems - Lecture Series 8: Ie 3265 Pom R. R. Lindeke, PHD Spring 2005Document42 pagesCellular Manufacturing Systems - Lecture Series 8: Ie 3265 Pom R. R. Lindeke, PHD Spring 2005saisenthNo ratings yet
- Electrical Notes - PvsDocument84 pagesElectrical Notes - PvssaisenthNo ratings yet
- Cellular Manufacturing Systems - Lecture Series 8: Ie 3265 Pom R. R. Lindeke, PHD Spring 2005Document42 pagesCellular Manufacturing Systems - Lecture Series 8: Ie 3265 Pom R. R. Lindeke, PHD Spring 2005saisenthNo ratings yet
- Electrical Notes - PvsDocument84 pagesElectrical Notes - PvssaisenthNo ratings yet
- Cim Syl SpuDocument2 pagesCim Syl SpusaisenthNo ratings yet
- 7 Production Planning ControlDocument20 pages7 Production Planning Controlmaanish000No ratings yet
- Group Technology in MFG SystemsDocument14 pagesGroup Technology in MFG SystemssanoojsiddikhNo ratings yet
- Coding and ClassificationDocument6 pagesCoding and ClassificationsaisenthNo ratings yet
- Cim Two Mark Que With AnsDocument7 pagesCim Two Mark Que With AnssaisenthNo ratings yet
- Ppcunit1 1Document1 pagePpcunit1 1saisenthNo ratings yet
- Drilling PDFDocument32 pagesDrilling PDFاحمد عمر حديدNo ratings yet
- CRM TemplateDocument17 pagesCRM TemplateAli MohamedNo ratings yet
- AVS Sevice Desk and Desk Side Support SOODocument28 pagesAVS Sevice Desk and Desk Side Support SOOCuong Duong DinhNo ratings yet
- Instruction Manual: SpecificationsDocument16 pagesInstruction Manual: SpecificationsJorge L. ContrerasNo ratings yet
- Richa Industries Wins First Rail Over Bridge Project For Railways (Company Update)Document2 pagesRicha Industries Wins First Rail Over Bridge Project For Railways (Company Update)Shyam SunderNo ratings yet
- Benefits of Cycling: Lessons from Top Cycling NationsDocument42 pagesBenefits of Cycling: Lessons from Top Cycling NationsZuniAsihNo ratings yet
- Ch11Integer Goal ProgrammingDocument54 pagesCh11Integer Goal ProgrammingAngelina WattssNo ratings yet
- Introduction To PMBOK - 2014Document49 pagesIntroduction To PMBOK - 2014'babi MulugetaNo ratings yet
- AD 302: Tightening of Ordinary Bolts: Sci Advisory DeskDocument2 pagesAD 302: Tightening of Ordinary Bolts: Sci Advisory DeskLightninWolf32No ratings yet
- Data Sheet 3196 MT-i - 3X4-13 - 130 m3h X 47 M GBQ - 49.991 - 14Document10 pagesData Sheet 3196 MT-i - 3X4-13 - 130 m3h X 47 M GBQ - 49.991 - 14Vinícius Toni MartinsNo ratings yet
- TSB WK PDFDocument4 pagesTSB WK PDFfulltransmissionNo ratings yet
- MBA 6011 Partial Mod 19 2013Document11 pagesMBA 6011 Partial Mod 19 2013sumithaps66469No ratings yet
- Exercise - Quality ToolsDocument10 pagesExercise - Quality ToolsĐức TrungNo ratings yet
- Mastercam 2023 Lathe enDocument3 pagesMastercam 2023 Lathe en정동현No ratings yet
- Stockdale Method Roundabout PDFDocument50 pagesStockdale Method Roundabout PDFAnonymous O7BzqVvmINo ratings yet
- Portable Machine MM2000iDocument3 pagesPortable Machine MM2000ijromero_rpgNo ratings yet
- Training On Industrial Engineering Basics For RMGDocument2 pagesTraining On Industrial Engineering Basics For RMGSalil BiswasNo ratings yet
- Dennis Resume 2009Document7 pagesDennis Resume 2009440grafixNo ratings yet
- Metering For Linemen: Current TransformersDocument3 pagesMetering For Linemen: Current TransformersEBENo ratings yet
- Industrial Training: Muhammad Amiruddin Bin Hassan 161382895 Ry44 - Integrated Electronic Alps Electric (M) SDN BHDDocument17 pagesIndustrial Training: Muhammad Amiruddin Bin Hassan 161382895 Ry44 - Integrated Electronic Alps Electric (M) SDN BHDAmiruddin HassanNo ratings yet
- Infineon FS30R06XL4 IGBT DatasheetDocument10 pagesInfineon FS30R06XL4 IGBT Datasheetmv_gearNo ratings yet
- General Considerations For Residential Considerations in Singapore Residential PropertyDocument54 pagesGeneral Considerations For Residential Considerations in Singapore Residential PropertyhosamlockNo ratings yet