Professional Documents
Culture Documents
Mechatronics Lab Manual
Uploaded by
kks2810Original Description:
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Mechatronics Lab Manual
Uploaded by
kks2810Copyright:
Available Formats
VIDYA PRATISHTHANS
COLLEGE OF ENGINEERING, BARAMATI
DEPARTMENT OF MECHANICAL ENGINEERING
LABORATORY MANUAL
SUBJECT: MECHATRONICS
[SUBJECT CODE: 302050]
CLASS: T.E. MECHANICAL
YEAR: 2011-12
APPROVED BY:
H.o.D. [Mech] Prof. P. R. Chitragar
PRINCIPAL Dr. S. B. Deosarkar
VALIDITY UP TO: ACADEMIC YEAR 2012 2013
PRAPARED BY:
PROF. D. D. Rupanwar
VIDYA PRATISHTHANS COLLEGE OF ENGINEERING, BARAMATI
DEPARTMENT OF MECHANICAL ENGINEERING
List of Experiments
FACULTY: PROF.D. D. RUPANWAR YEAR: 2011-12 SUBJECT: MECHATRONICS CLASS: T.E. (MECH)
1. Study of Displacement Measurement (LVDT) 2. Study of Load Cells 3. Study and Verification of P, I, D, P+I, P+D, P+I+D control actions 4. Development of Ladder diagram / programming PLC for bottle filling Plant. 5. Study of Thermocouples and RTD 6. Study of Switches and Relays 7. Study of Various Actuators 8. Study of Flip flops and Timers 9. Study of Applications of Op-Amp circuits 10. Study of A/D and D/A converters Industrial Visit Report on study of PLC and PID
Prof. D. D. RUPANWAR [Lab-Incharge]
MECHATRONICS-LABORATORY MANUAL
EXPERIMENT NO. 1 TITLE: LINEAR VARIABLE DISPLACEMENT TRANSFORMER
AIM:
To study input output characteristics of Linear Variable Displacement
Transformer. APPARATUS: Linear Variable Displacement Transformer. THEORY:
LVDT Trainer Scientech LVDT Trainer ST2303 is designed to learn LVDT characterstics.LVDT(Linear variable Differential Transformer) is the most widely used inductive transducers for displacement measurement. LVDT is a secondary transducers which converts the displacement directly into electrical output proportional to the displacement. The trainer has seven segment LED display showing displacement in mm with sensitivity of 10mv/mm in the range of 10mm.ST2303 is self contained single box design and easy to use.
Self contained and easy to operate. Sensitive, Linear Stable and Accurate. Functional block indicated on broad mimic 3 digit LED display with polarity indicator. Onboard LVDT displacement measurement jig with micrometer. Amplitude measurement for Excitation Generator.
Features High repeatability and reliability. Compact size.
Study of Input and Output characteristics of LVDT. Experiment To determine linear range of operation of LVDT. that can be To determine sensitivity of LVDT. performed To measure Phase difference between LVDT secondaries DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
It is used for measurement of displacement. LVDTs operate on the principal of a transformer. LVDT consists of a coil assembly & a core. The coil assembly is typically mounted to a stationary form, while the cored is secured to the object whose position is being measured. The coil assembly consists of three coils of wire would on the hollow form. A core of permeable material can slide freely through the center of the form. The inner coil is the primary, which is excited by an AC source as shown. Magnetic flux produced by the primary is coupled to the two secondary coils, including an AC voltage in coil.
The main advantage of LVDT over the other types of displacement transducer is the high degree of robustness. Because there is no physical contact across sensing element, there is no wear in the sensing element. Because the device relies on the coupling of magnetic flux, an LVDT can have infinite resolution. Therefore the smallest fraction of movement can be detected by suitable signal conditioning hardware, and the resolution of the transducer is solely determined by the resolution of the data acquisition system.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
LVDT MEASUREMENT: LVDT measures displacement by associating a signal value for any given position of core. This association of signal value to a position occur through electromagnetic coupling of an AC excitation value signal on the primary winding to the core & back to the secondary winding. The position of the core determines how tightly the signal of the primary coil is coupled to each of the secondary coils. The two secondary coils are series-opposed, which means wound in series but in opposite directions. This results in the two signals on each secondary being 180o out phase. Fig .depicts a cross sectional view of LVDT. The core causes the magnetic field general by primary winding to be coupled to the secondary. When the core is centered perfectly between both secondary & the primary the voltage induced in each secondary is equal in amplitude & 180oout of phase. Thus the LVDT output is zero because the voltages cancel each other. Displacing the core to the left causes the first secondary to be more strongly coupled to the primary than the second secondary. The resulting higher voltage of the first secondary in relation to the second secondary causes an output voltage that is in phase with primary voltage likewise. Displacing the core to the right causes the secondary to be more strongly coupled to the primary than the first secondary. The greater voltage of the second secondary causes an output voltage to be out of phase with the primary voltage. FEATURES & APPLICATION: Its features & benefits are as follows 1. FRICTION FREE OPERATION: One of the most important features of an LVDT is its friction free operation. In normal use, there is no mechanical contact between the LVDT core & coil assembly so there is no rubbing, dragging, or other source of friction. 2. INFINITE RESOLUTION: Since an LVDT operates on electromagnetic coupling principle in frictionfree structure, it can measure infinitesimally small change in core position. This infinite resolution capability is limited only by the noise in an LVDT signal conditioner & the output displays resolution.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL 3. UNLIMITED MECHANICAL LIFE: This factor is especially important in high reliability applications such as air craft, satellites & space vehicles & nuclear installations. It is also highly desirable in many industrial process control & factory automation systems. 4. SINGLE AXIS SENSITIVITY: An LVDT responds to motion of the core along the coils axis but is generally insensitive to cross position thus on LVDT can usually function without observe effect in application involving misaligned or floating mooing member. 5. NEW POINT REPEATABILITY: The location of LVDTs intrinsic null point is extremely stable & repeatable, even over wide operating temperature range. This makes an LVDT perform well, as a null position sensors in closed loop control system & high performance servo balance instruments. 6. FAST DYNAMICS RESPONSE: The absence of friction during ordinary operation permits an LVDT to respond very fast to changes in core position. The dynamics response of an LVDT sensor itself is limited only by the inertial effect of the cores slight mass. 7. ABSOLUTE OUTPUTS: An LVDT is an absolute output device, as opposed to an incremental output device. This means that in the event of loss of power, the position data being sent form the LVDT will not be lost.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL FUNCTIONAL DESCRIPTION OF BLOCKS: 1. LVDT MEASUREMENT JIG: It is enclosed in M.S. enclose with arrangement of two hexagonal nuts that can be rotated clockwise or anti- clockwise to set the reading on display to 0.0 at 10mm position on micrometer. LVDT core is attached to the micrometer spindle.
2. MICROMETER: The micrometer provides displacement to the LVDT core. The displacement suffered by core is indicated by 3 1\2 digit LED display in mm. It will be same as read on micrometer. The main scale of micrometer is at 25mm. Least count of main scale is 1mm. Circular scale on thimble is of 1mm with least count 0.01mm. On one circular rotation of thimble, the spindle will display LVDT core 1mm.
3. EXCITATION GENERATOR: The output of excitation generator is 4 KHz sine wave of variable amplitude. It is used to excite primary coils of LVDT. The max input given to primary of LVDT is 4V p-p, which can be set by an amplifier preset given in the Excitation generator block. 4. BUFFER: It is used to improve current driving capacity of excitation generator so that excitation generator can drive low impedance primary coil of LVDT. 5. SIGNAL CONDITIONER: - It is used to process the form or mode of a signals so as to make it intelligible to, or compatible with, a given devices, including such a manipulation as pulse shaping, pulse clipping, compensating digitalizing etc. It consists of rectifier & filter section for each secondary coil. 6. DIFFERENTIAL AMPLIFIER: It is OPAMP based differential amplifier block. It converts the differential output of signal conditioner block to the single ended output, which can be used as input to some recording stage to record the data. The output is same as indicated by display. 7. DISPLAY: It is 3 1\2 digit LED display. It shows displacement of core in mm with polarity indication. +ve sign shows, core is moved inside & -ve sign shows it is moved outside the LVDT.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL PROCEDURE: 1. Switch on the trainer. Make micrometer to read 10mm i.e. rotate thimble till 0 of the circular scale coincides with 10 of main scale 2. Display will indicate 0.0 this is the position when core is at the center i.e. equal flux linking to both the secondary. 3. If display is not 0.0 then adjust display reading 0.0 then adjust display reading to 0.0 with the help of hexagonal arrangement given with the LVDT. 4. Rotate thimble clockwise so that micrometer read 9.9mm. It will move core 0.1 mm inside the LVDT and simultaneously observe reading on display. It will indicate displacement from 10 mm position in positive direction. The reading will be positive it indicates that secondary - I is at higher voltage than secondary-II. 5. Repeat above step by rotating thimble again clockwise by 0.1mm. Reading will be taken after each 0.1 mm rotation until micrometer read 0 mm. This is positive end. 6. Rotate thimble anticlockwise so that micrometer read 10mm. The display will be 0.0 (center). 7. Rotate thimble anticlockwise so that micrometer read 10.1mm. It will move core 0.1 mm outside the LVDT and simultaneously observe reading on display. It will indicate displacement from 10 mm position in negative direction. The reading will be negative. 8. Repeat above steps by rotating thimble again anticlockwise by 0.1 mm. Reading will be taken after each 0.1 mm rotation until micrometer is 20mm. This is negative end. 9. Compare above results with the observation table 10. Plot the graph between displacement (mm) indicated by micrometer & display reading (mm) the graph will be linear as shown in diagram.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL OBSERVATION TABLE:
SR.NO. 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21
DISPLACEMENT INDICATED BY MICROMETER (mm) 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20
DISPLAY READING (mm) + 10 + 09 + 08 + 07 + 06 + 05 + 04 + 03 + 02 + 01 00 - 01 - 02 - 03 - 04 - 05 - 06 - 07 - 08 - 09 - 10
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL DISPLAY READING
-10
+1 0
10
15
20
DISPLACEMENT INDICATED BY MICROMETER
CONCLUSION: In this way we have studied input output characteristics of LVDT trainer.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
EXPERIMENT NO. 2 TITLE: LOAD CELL TRAINER AIM: To study load cell trainer. APPARATUS: Load cell trainer consisting of a) Load cell b) Mechanical stand and pan with cantilever strip. c) Electronics exciter with digital indicator. d) Weight ranging from 20gm to 500grams. THEORY: Transducers play very important role in the engineering applications. It is essential to measure parameters like weight, force, pressure, temperature and so on frequently, for which transducers are required. Strain gauge is one of the
prime transducer widely used in industry for measurements of weight, load, force, pressure, displacement, indirectly for torque, stress and strain. The property of material used for strain gauges is, change in resistance when expose to mechanical or physical change in its shape. The strain gauge foils are available with different resistance values, different sizes and different gauge factors. (Gauge factor is the ratio of change in resistance with elongation or strain). Normally strain gauges are available with 120, 240, 330 resistance values. Resistance wire stain gauges are transducers applied to the surface of structural members under test in order to sense the elongation or strain due to applied loads. The setup consists of mild steel structural strip duly ground from both the side ensuring smooth surface rigidly mounted on a sturdy solid square bar supported on heavy stable base structure. The sturdy structure stand ensures better result. DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
Strain gauge sensor of plastic foil type with 120
resistance and 8mm
gauge length, 5mm width, compensated for mild steel type are pasted to steel strip. The pasting procedure is very important as it is directly related to elongation of strain gauges when load is applied. Perfect surface contact shall give us better and consistent change in resistance linear to load applied on it. The strain gauges changes its resistance with variation of temperature. The change in resistance is too small in value which makes it difficult in sensing the change. In view of this the strain gauges are used in the form of bridge and electronic signal generated is processed by instrumentation amplifier. Bridge may have only one arm or two arms or four arms strain gauges as active element and balance resistances as passive element. Two arm strain gauge bridge is the option preferred on performance basis. We use two strain gauges as active bridge elements and other two 120 passive resistor. The strain gauges are pasted to steel strips in such a way that one strain gauge sensor is compressed while other is elongated, resulting in differential change in resistance, increasing the sensitivity. One strain gauge pasted from top to the strip and another exactly below from bottom, both the strain gauges are wired with passive resistors in the form of bridge and terminated at bottom plate on a connector ,makes it easy for connection. Small pan hooked up to the dead end cantilever with weights.
TYPES OF LOAD CELLS: HYDRAULIC LOAD CELL: Figure shows the cross section of the hydraulic load cell. The cell uses the conventional piston and cylinder arrangement. The piston doesnt come actually in contact with the cylinder wall in the normal sense, but a thin elastic diaphragm or bridge ring, of steel is used as the positive cell, which allows small piston movement. Mechanical stop prevents the seal from being overstrained. The cell is filled with oil. When the force act on the piston, the resulting oil pressure is transmitted to some pressure DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
sensing device like Bourdon gauge, electrical pressure transducers can also be used to obtain an electrical output. If the load cell is completely filled with oil, very small transfer or flow is required. Piston movements may be less than 0.05 mm at full capacity. This feature is responsible for good dynamic response for the system. However the overall response is largely determined by the response of the pressure sensing element. A problem with hydraulic cell using conventional piston and cylinder arrangement is that the friction between the piston and cylinder wall and required packing and seals is unpredictable.
PNEUMATIC LOAD CELL: A typical pneumatic cell is as shown in figure. This cell uses a diaphragm of a flexible material and is designed to automatically regulate the balancing pressure. The air pressure is supplied to one side of the diaphragm and is allowed to escape through position controlling bleed valve. Pressure under the diaphragm is therefore controlled both by the source pressure and bleed valve position. The diaphragm tries to take up the position that will result in just the proper air pressure to support the load. This naturally assumes that the supply pressure is large enough so that its value multiplied by effective area will at least equal to the load.
PIEZOELECTRIC LOAD CELL: In this type of cell, piezoelectric crystal is used for dynamic force measurement. Such transducers are very sensitive and used over a wide range. They are used for measuring impact type of dynamic load. PRECAUTIONS: 1) Connect the electronic unit to main 230V AC and turn it ON. 2) Place the mechanical stand horizontal and on firm platform. 3) Connect the bridge wire to electronic unit. DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
4) Ensure proper connections. 5) Gently press the cantilever down and observe the change on electronics display, if change noted then unit is properly connected. 6) Wait to stabilize and warm up for five minutes. EXPERIMENTAL PROCEDURE: 1) Ensure that connections are proper and electronic display responds gentle pressure at cantilever. 2) Adjust 0.0 reading on display with empty pan hooked. 3) Measure bridge excitation voltage on DMM. 4) Observe bridge output on DMM. 5) Place calibration weight in pan and observe the display reading. 6) Keep on adding the weight and record the reading. 7) Reverse the procedure by removing the weight one by one.
CONCLUSION: Hence we have studied load cell trainer. We found that there is a slight difference in increasing weight response and reducing weight response.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
EXPERIMENT NO. 3 TITLE: P+I+D CONTROLLER AIM: To study and verify different control actions such as On-Off control, Proportional control, Derivative control, Integral control, Proportional + Derivative control, Proportional + Integral, Proportional + Integral + Derivative control with a temperature controller. APPARATUS: Temperature controller
PID Trainer
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
THEORY: A controller is a device which compares the output of a system with the required conditions and converts the error signal into control action, designated to reduce the error in a closed loop control system. The error might arrive due to changes in the conditions being controlled or due to change in set value. TYPES OF CONTROL ACTIONS: 1. ON OFF/TWO STEP MODE CONTROL: In a two step mode the controller is just a switch which is activated by the error signal and supplies just an on-off correcting signal. It is a discontinuous control action. A consequence of this is that oscillations of the controlled variable about the required condition occur. Two step control action tends to be used where changes are taking place very slowly i.e. with a process with a large capacitance. On-off controllers are not restricted to mechanical switches such as bimetallic strips, the thyristor circuits can also be employed for rapid switching. This control mode is not precise as it involves oscillations with long periodic times. 2. PROPORTIONAL CONTROL: With the proportional mode, the size of the controller output is proportional to the size of the error signal. It means that correction element receives a signal which is equal to the size of the correction required. Fig. shows how the output of such a controller varies with the size and sign of the error. The linear relationship between controller output and error tends to exist for a specific portion of the graph, which is known as proportional band. With in the proportional band the equation of the straight line is represented as Change in controller output from set point = Kp e Where e is the error and Kp is a constant known as proportional constant. Kp is thus the gradient of the straight line. The controller output is generally expressed in terms of percentage of the full range of possible outputs within the proportional band. Generally a 50% controller output is specified for zero error. It is not possible to achieve the change in the percent output of controller with the change in set value with zero error setting. It requires a permanent error
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
setting called offset. The size of the offset is proportional to the size of load changes and inversely proportional to Kp, so a higher value of Kp gives more steeper graph. This mode is utilized in processes where the value of transfer function can be increased large enough so as to reduce the offset to an acceptable level. 3. DERIVATIVE CONTROL: With the derivative mode of control the change in controller output from set point is proportional to the rate of change with time of error signal. This can be represented by the equation Iout - IO = KD de/dt Where IO set point output value and Iout is the output value that will occur when the error is e is changing at the rate de/dt. It is usual to express these controller outputs as percentage of the full range of the output and the error as the percentage of full range. With the derivative mode as the error signal begins to change there can be a quite large output since it is proportional to the rate of change of error signal and not the value of error signal. Fig. shows a controller output that results when there is a constant rate of change of error signal with time. The controller output is constant as the rate of change is also constant and occurs immediately as the deviation occurs. Derivative mode is not suitable for steady state error signals. 4. INTEGRAL CONTROL: The integral mode of control is one where the rate of change of the control output I is proportional to the error signal e. dI/dt = KI e Figure illustrates the action of integral controller when there is a constant error input to the controller. When the controller output is constant the error is zero, the graph can be analyzed in two ways. PRECAUTIONS: Ensure the PID trainer is connected to 230 V AC mains. Ensure no any error detected while self diagnostic check during power ON. Ensure the Proper mode of control action is selected. Ensure the Proper PID constants are programmed. Ensure the Proper set point is programmed. DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
PROCEDURE: I. Connect the PID trainer to 230 V AC mains. II. Turn ON the mains & observe self diagnostic tests. III. Ensure no error while self diagnostic check. IV. Set appropriate PID constants V. Set OUT% Output percentage to 100% VI. Set proper Set value VII. Select the controller mode; refer the PID controller mode selection chart VIII. Note the observations IX. Give step change to SV X. Repeat from step VIII PID CONTROLLER MODE SELECTION:
SR. NO. 01 02 03 04 05
TYPE OF CONTROL ACTION On-Off Control Proportional Control Derivative Control Integral Control Proportional + Derivative Control Proportional + Integral Control Proportional + Integral + Derivative Control
PROPORTIONAL CONSTANT 0 0-200% 0 0 0-200%
INTEGRAL CONSTANT 0 0 0 0-3600 Seconds 0
DERIVATIVE CONSTANT 0 0 0-900 Seconds 0 0-900 Seconds
06
0-200%
0-3600 Seconds
07
0-200%
0-3600 Seconds
0-900 Seconds
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL BLOCK DIAGRAM OF PID TRAINER SYSTEM:
FURNACE TEMPERATURE
TEMPERATURE SENSOR K-TYPE THERMOCOUPLE
PROCESS VALUE PID SET VALUE
(Temp. sensor input to PID)
(Output of PID to T.M.)
THYRISTERISED MODULE (T.M. Controls the Heater)
HEATER
(Heating the Muffle Furnace)
MUFFLE FURNACE
FAN
(FAN FOR COOLING OR DISTURBANCE)
OUT
Thy. Module
Display F Muffle Furnace A N
SET
PID Controller
PV SV
STUDY OF DIFFERENT CONTROL ACTIONS:Keyboard DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL S=200 P=0 I=0 D=0 205 3.6 0 0 210 0 35 0 Temp Using P 201.9 191.4 187.5 194.5 201.3 197.4 201.3 197.4 188.2 189.6 198.5 210.1 193.1 187.4 193.5 200.8 198.3 189.1 187.9 198.7 201.2 192.7 187.8 194 201.3 197.8 188.6 190.1 198.8 201.4 215 0 0 14 Temp Using I 198 192.7 199.1 207.3 199.5 192.2 198.4 206.8 201.8 192.3 196.8 205.5 202.6 192.5 196 203.6 204.4 193.1 194.6 202.2 202.6 195 194 200.7 207 197.4 192.1 198.1 205.8 201.6 220 3.6 55 0 Temp Using D 224.1 212.9 204.7 215.8 277.7 221.6 208 208.4 222.6 227.7 216.5 205.1 211.7 227 226 213.7 204.7 214.9 228.7 223.2 210.4 206.1 219.5 228.9 220.5 207.3 208 223.2 228.3 217.2 Temp Using P+I 218.4 213 215.8 227.4 230.4 219.5 207.6 207.8 221.1 228.6 219.8 206.4 207.7 221.6 228.8 220.5 207 207 206.6 220.2 229.3 222.2 208.1 205.7 219.6 228.9 208.1 205.6 220.7 229.1 225 3.6 0 14 Temp Using P+D 199.2 195.6 200.1 196.3 200.3 197 200 198.6 199.9 199.5 198.7 200.7 197.7 201.3 197.3 201.3 197.2 201.0 197.6 200.2 199.3 198.9 199.8 197.2 201.1 196.8 201.7 197.1 201 199.2 230 3.6 55 47 Temp Using P+I+D 226.1 229.5 228.4 231.4 228.6 231.9 228.6 231.9 228.6 231.9 228 232.3 223 231.9 228 231.8 228.2 231.8 228.2 231.5 229.2 231.2 229.8 230.4 230.6 225.1 230.8 228.7 231.4 228
Time(sec) Temp (degree celsius) 20 191.2 40 203.1 60 204 80 188 100 185.3 120 194.3 140 204.6 160 201.9 180 186.8 200 186 220 195.6 240 205.9 260 200.7 280 185.2 300 188.1 320 197.9 340 206.9 360 196.5 380 184 400 188.9 420 199.4 440 206 460 193.6 480 184.2 500 191.1 520 201.6 540 205.3 560 190.8 580 184.8 600 193
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
1: Temperature V/S Time:-
2: Temperature Using P V/S Time:
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
3: Temperature Using I V/S Time:
4: : Temperature Using D V/S Time:
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
5: Temperature Using P+I V/S Time:
6: Temperature Using P+D V/S Time:
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
7: Temperature Using I+P+D V/S Time:
CONCLUSION: Hence we have studied different control actions for a temperature controller. We have found that the best control action is Proportional + Derivative + Integral.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
EXPERIMENT NO. 4 TITLE: LADDER DIAGRAM AND PLC PROGRAMMING AIM: Study of Mechatronics system with development of ladder diagram & PLC
programming for bottle filling plant. APPARATUS: Bottle filling plant trainer model, Allen bradly make PLC loaded with programme. THEORY: A] INTRODUCTION TO PLC: Basic structure in beverage industries & petrochemical industries where the product is in the liquid form such as cold drinking, milk product etc. Depending upon the product different types of cans, glass bottles, paper cartoons are used for filling product. So it is necessary to design a plant comfortable for metallic & non metallic devices. Fig. shows bottle filling plant which consist of following parts. 1] Conveyor belt driven with servomotor. 2] Proximity switches- inductive and capacitive to sense the metal and nonmetal. 3] Tank containing liquid which is to be filled by motor. 4] Output indicating LEDs 5] Load sensing devices (Circuit switches)
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
B] PLC (Allen Bradly): PLC uses both analog & digital input & gives the same output to different channels. For analog and digital input, output programming logic in PLC is supplied by ladder programming using software RD logos.
C] BOTTLE FILLING PLANT: By changing the time of timers inbuilt in PLC it is possible to fill different volumes of liquid into the bottles. A fast, accurate & steady filling is insured by properly setting time count in the timer by using the word accurate. It means that the liquid is delivered exactly into the bottle without spoilage of liquid outside the bottle. The operating parameter such as quantity of liquid, movement of bottle on the conveyor, filling head opening & filling speed for different bottle sizes can be taken care of by PLC interfacing with plant model. Auto protecting features as alignment & orientation of bottles passing on conveyor is important. Proximity sensor used in this model can also be used for position sensing of bottles. The bottles are then placed & passed for position sensing. This would make, filled bottle is passed through conveyor by passing through filling programme, when presence of liquid in bottle is
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
detected. The systems is timed, so that the bottle is moved on the conveyor to filling unit in fixed time & before filling unit it mainly consist of solenoid valve, submersible pump & floating sensor. Solenoid valve opens & water beverage begins to flow through plastic fill nozzle. The bottle stays in position for programmed time. After bottle gets filled the conveyor moves & allows the next bottle to set into position.
1] CONVEYOR: It is belt connected to chassis of an AC servomotor & it rotates with rotation of motor. Object is to be placed on the belt then it is moved towards filling section. 2] PROXIMITY SWITCHES: To confirm that object is properly placed in perfect position or not, proximity switches are used. It detects the appearance of subject in front of them. For metallic objects inductive switches are used & for non-metallic object capacitive switches are used. 3] FILTERS: Filters are used on the top of AC pump assembly. 4] OUTPUT INDICATOR: LEDs used for identification of different operations such as filling, fault finding etc. 5] LOAD SENSING DEVICES: In case of partially filled bottles comes on belt conveyor, that bottle is passes as it is, without filtering. PROCEDURE: 1) Download program of filling on PLC. 2) Make input and output connections. 3) Keep bottle on conveyor and press start switch. 4) When bottle comes in front of proximity switch conveyor belt will stop. 5) The bottle filling will start up to predetermined time as per logic. 6) Same procedure is repeated further for each bottle.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
LADDER DIAGRAM
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
CONCLUSION: Hence we have studied Mechatronics system with development of ladder diagram & PLC programming for bottle filling plant.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICE-LABORATORY MANUAL
EXPERIMENT NO. 5 TITLE: RTD AND THERMOCOUPLES AIM: 1. To study the characteristics of RTD . 2. To study the characteristics of J , K and PT100 type of thermocouples.
APPARATUS: 1) Thermocouple & RTD characteristics trainer. 2) Digital Multi Meter. 3) J & K thermocouple, PT100 RTD. THEORY:
RTD Trainer
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICE-LABORATORY MANUAL
PT100 Thermocouple
RTD: It is resistance temperature detector. The resistance of a conductor changes with change in temperature, this property is utilized for measurement of temperature. The variation of resistance with temperature is represented by following relationships for most of the metals. R = R0 [1+ 1T + 2 T+..+ n T] R0 = Resistance at temperature T = 0
1, 2, n = Constants
Platinum is especially suited for this purpose, as it can withstand the high temperatures while maintaining high stability. The requirements of a good conductor material to be used in RTD are
1. The change in the resistance of material per unit change in temperature should be less as large as possible. 2. The material should have a high value of resistively so that minimum volume of material should be used for the construction of RTD. 3. The resistance of the material should have a continuous and stable relationship with temperature.
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICE-LABORATORY MANUAL
The most common RTDs are made of platinum, nickel or nickel alloys. The economical nickel wires are used for a limited range of temperatures. Metals most commonly used for resistance thermometer along with their properties are listed below. RESISTANCE METAL TEMPERATURE COEFFICIENT PLATINUM COPPER NICKEL TUNGSTEN 0.39 0.39 0.62 0.45 MIN -260 0 -220 -200 TEMPERATURE RANGE
OC
MELTING MAX 110 180 300 1000 POINT OC 1773 1083 1435 3370
THERMOCOUPLE: If two different metals are joined together, a potential difference occurs across one of the junction, if another junction is heated. The potential difference depends on the metals used and the temperature difference between the junctions. If both the junctions are at same temperature then there will not be net emf produced. Thermocouples are most important temperature sensors used in industries. Thermocouples are generally mounted on a sheath to give them mechanical and chemical protection. The type of sheath used depends on the temperature, at which the thermocouple is to be used. The best metal thermocouples are E, J, K & T; these are relatively cheap but deteriorate with the age. LAWS OF THERMOCOUPLE LAW OF INTERMEDIATE TEMPERATURE: The emf generated in a thermocouple with junctions at temperatures T1 & T3 is equal to the sum of emf generated by similar thermocouples one acting between T1 & T2 and other between T2 & T3, when T2 lies between T1 & T2.
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICE-LABORATORY MANUAL
LAW OF INTERMEDIATE MATERIAL: If a third wire introduced in between two conductors, the emf generated remains unaltered if the two new junctions are at same temperature.
PRECAUTIONS: Ensure the following points for proper functioning of the trainer. 1) 2) 3) 4) Mains supply is 1 230VAC 10% 50HZ. Furnace is off and sensor is in place. Fan is off and away from furnace Sensor under calibration is removed from furnace.
EXPERIMENTAL PROCEDURE: 1) 2) 3) 4) Ensure mains supply is 1 230VAC 10% 50HZ. Turn off the fan and furnace Connect the trainer to mains and turn on the trainer Ensure the digital temperature indicator displays room temperature or appropriate temperature i.e. furnace temp. 5) 6) Give desired set point on digital temp controller Insert sensor in the furnace and connect it to the Digital Multi Meter on appropriate range. 7) 8) Turn the furnace on and note sensor output as per observation table. If required to restrict furnace temperature, switch off the furnace at any point. Furnace temp shall latch with over shoot of around 60-800C 9) Also turn on the fan to reduce furnace temperature, if required.
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICE-LABORATORY MANUAL
OBSERVATION TABLE: A] J & K THERMOCOUPLE SENSOR Measure thermocouple output in mV on DMM range 0-200mV. [SAMPLE READINGS, ROOM TEMPERATURE 26OC] SR. NO. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 FURNACE TEMP [0C] 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 J THERMO COUPLE OUTPUT IN [mV] 1 1.1 1.14 1.23 1.56 1.89 2.19 2.51 2.86 3.13 3.56 3.87 4.36 4.75 5.21 6.21 6.36 6.64 7.08 7.45 7.78 K THERMO COUPLE OUTPUT IN [mV] 0.15 0.17 0.2 0.22 0.24 0.26 0.29 0.43 0.54 0.67 0.83 0.95 1.07 1.27 1.41 1.59 1.79 1.98 2.21 2.42 2.63
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICE-LABORATORY MANUAL 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 240 250 260 270 280 290 300 310 320 330 340 350 360 370 380 390 400 410 420 430 440 450 460 470 480 490 500 8.33 8.76 9.14 9.7 10.1 10.59 10.81 11.42 11.83 12.27 12.72 13.13 13.44 13.66 14.08 14.82 15.27 15.56 16.06 16.52 16.96 17.37 17.81 18.26 18.62 19.07 19.27 2.85 3.06 3.27 3.49 3.71 3.95 4.14 4.38 4.57 4.79 5.01 5.22 5.43 5.66 5.87 6.09 6.29 6.5 9.71 6.94 7.15 7.37 7.61 7.83 7.83 8.06 8.3
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICE-LABORATORY MANUAL
J-THERMOCOUPLE CHARACTERISTICS 25 20
VOLTAGE
15 10 5 0 0 100 200 300 TEMPERATURE 400 500 600
K-THERMPCOUPLE CHARACTERISTICS 9 8 7 6 5 4 3 2 1 0 0 100 200 300 TEMPERATURE 400 500 600
VOLTAGE
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICE-LABORATORY MANUAL
RTD PLATINUM 100 SENSOR: Measure RTD output in on DMM range 0-200 .
SR. NO. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
FURNACE TEMP [0C]
RTD OUTPUT R IN
RESISTANCE CALCULATED RC []
90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250 260 270 280
123.85 124.28 124.83 125.58 126.59 127.57 128.7 129.88 131.8 132.83 133.82 134.97 136.62 137.99 139.65 140.08 142.6 143.96 146.52 147.5
100 103.85 107.7 111.55 115.4 119.25 123.1 126.95 130.8 134.65 138.5 142.35 146.2 150.05 153.9 157.75 161.6 165.45 169.3 173.15
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICE-LABORATORY MANUAL 21 22 23 24 25 26 27 28 29 30 31 32 290 300 310 320 330 340 350 360 370 380 390 400 148.66 150.07 151.72 153.74 154.23 157.07 158.84 160.6 162.45 164.49 165.34 168.47 177 180.85 184.7 188.55 192.4 196.25 200.1 203.95 207.8 211.65 215.5 219.35
SAMPLE CALCULATIONS: Rc = 100 (1+ 0.00385[T-TO]) FOR SAMPLE READING AT T=120 R IS 125.58 AND T-TO IS 120-30 =90 SO RC = 100 ( 1+0.00385 [120-90] ) RC= 111.55
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICE-LABORATORY MANUAL
PLATINUM 100 RTD CHARACTERISTICS 250
RESISTANCE
200 150 100 50 0 0 100 200 300 400 500 TEMPERATURE
CONCLUSION: Hence we have studied characteristics of J & K thermocouple and platinum100 RTD.
DEPARTMENT OF MECHANICAL ENGINEERING
MECHATRONICS-LABORATORY MANUAL
EXPERIMENT NO. 6 TITLE: RELAYS AND SWITCHES
AIM: To study the relay & switches. THEORY: SWITCHES: Mechanical switches consist of one or more pair of contacts which can be mechanically closed or open and doing so make a brake electrical circuit. Thus 0 or 1 Signal can be transmitted by the act of opening or closing a switch. Mechanical switches are classified in term of their poles & throws. Poles are the no of separate circuit that can be completed by some switching action & throws are the number of individual contacts for each pole.
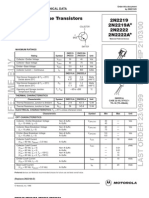
SOLID STATE SWITCHES: There are no of solid state switches which can be used to electronically switch circuit. These includes 1. Diode 2. Thyristor & Triaes 3. Bipolar Transistor 4. Power MOSFETS DIODE: Diode allows the significant current in one direction only. A diode can be regarded as directional element only passing a current when forward biased. If the diode is reverse biased, i.e. for a very high voltage, it will break down. If an AC voltage is applied to diode it can be regarded as only switching ON when the direction of the voltage is forward biased and being OFF when the reversed biased. The result is that
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
the current through the diode is half- rectified to become just the current due to positive halves of the input voltage. THYRISTORS: The thyristor of silicon controlled rectifier (SCR) can be regarded as a diode which has a gate controlling, the conditions under which the diode can be switched ON with the gate current zero. The thyristor passes negligible current when reversed biased. When forward biased, the current is also negligible until forward breakdown voltage exceeds. When this occurs voltage across the diode falls to a low level about 1 to 2 volt.
I
FORWARD BAISED
v
REVERSE BAISED
DIODE CHARACTERISTICS
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
HALF WAVE RECTIFIER
BIPOLAR TRANSISTOR: It is of two types 1.NPN
2.PNP .In NPN transistor the
main current flows in, at the collector & out as a emitter & vice versa for PNP. For NPN transistor, so connected to termed as common emitter circuit, when base current IB is zero, transistor is cut off. In this state both the base emitter & base collector junction are reverse biased, relationship bet Ic & Vce is as shown in graph. MOSFETS (Metal oxide field effect transistor): It has two type 1.NCHANNEL 2. P-CHANNEL. In this no current is flowing into gate to exercise the control. The gate voltage is controlling signal with the MOSFETS very high frequency switching is possible up to 1 MHz. PROXIMITY SWITCHES: There are number of form of switches which can be
activated by the presence of an object in order to give a proximity sensor with an output which is either ON or OFF. The micro switch is a small electrical switch which requires physical contact and a small operating force to close the contact. e.g. Determining the presence of an item on a conveyor belt, this might be actuated by the weight of the item on the belt and hence spring loaded plate from under it. The movement of this platform closes the switch. This type of switches is widely used for checking the closing and opening of door.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
TIMED SWITCHES: Consider a simple requirement for a device which switches ON some actuator e.g. motor for some prescribed work. A mechanical solution could involve a rotating cam. The cam would be rotated at a constant rate and follower used to activate a switch. The length of time for which the switch is closed, depends on the shape of the cam. DEBOUNCING: A problem that occurs with mechanical switch bounce, when a
mechanical switch is switched to close the contacts. We have one contact being moved towards the other. It hits the other end & because the contacting elements are elastic, it may bounce for number of times before finally settling to its closed state. It might appear that, perhaps two or more separate switch actions have occurred. Similarly when a mechanical switch is opened, bouncing can occur. KEYPADS: A keypad is an array of switches, perhaps the keyboard of a computer or the touch input membrane pad for some device such as micro wave oven. A contact type of the form generally used with a keyboard is shown depressing the key plunger, force together with spring returning the key to the position when key is released. A DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
typical membrane switch is built up from two water thick plastic films, on which conductive layers have been printed. These layers are separated by a space layer, when the switch area of the membrane is pressed. RELAYS: Relays are electrochemical switches. A relay is basically formed by a coil & one or more pair of contacts as shown in fig. When a voltage is applied to the coil, the current flow creates a magnetic field that attracts the contact & closes the switch. If the current across the coil is cut, the magnetic field disappears & the contact can be triggered On & OFF by current passing across the coil. The important properties can be noted in this arrangement. 1 .The controlled circuit is completely isolated from the control circuit. 2. We can apply low voltage & low current to the relay coil to control high voltage or high current circuit.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
CONTROL RELAYS: Relays can be used for much than just as an energy level translator. e.g. Figure shows a relay used as a latch, where a green light is ON when the relay is not latches & a red light is ON when the relay is latched. In this case when the normally open push button switch is depressed, control relay R11 is energized. But when its normally open, contact closes by passing so that the relay stay closed. Thus it is latched to de energized. SPECIAL TYPE OF RELAYS: LATCH RELAYS: Latch or bistable relays are turned on by a current flowing in the direction & they maintain the ON state even when the current is cut to turn OFF the relay. It is necessary to apply another current to the coil, but in the opposite direction. Some latch relay uses two coils, when one to turn ON & the other turn OFF. SOLID STATE RELAY: These are special types, in which the contacts are replaced by some kind of solid state switch such as transistor, SCR, TRIAC or other devices.
REED REAYS: These are relays formed by reed switch & a coil in the configuration shown in fig. The operational principle is same as that of common relays, when current
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
flows through the coil, the resulting magnetic field acts on the contacts of the reed switches & closes them. Reed relays are small are small & very sensitive but cant handle large currents.
HOW RELAYS ARE USED: When using relays we have both the devices that is to be controlled & circuit that will drive the relay. BY USING CONTACTS: In fig A, we show the simplest application of the relay. It is used as an SPST switch to control an external load. The load is ON when current flows across the coil. In fig B, Here we show how the normally closed contacts can be used to turn a load OFF, when the relay is energized .This configuration is preferred. When the load on time exceeds the OFF time. Fig C shows the DPDT relay can be used to control the direction of the current flowing across a load. When the relay is OFF, the direction of current is I1. When relay is ON the direction is I2 CONCLUSION: Hence we have studied different types of relays and switches.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
EXPERIMENT NO. 7 TITLE: TYPES OF ACTUATORS
AIM: To study the Actuators. THEORY: ACTUATORS: Ina control system the element which transforms the output of controller into a controlling action / motion is called as actuators.Actuatros product physical changes such as linear motors, hydraulic cylinders, pneumatic cylinders and motors .Actuators can handle the static or dynamic loads placed on it by control valve the important aspects of actuators are are proper selection and sizing FUNCATIONS OF ACTUATORS : An actuator has two major functions. 1) To respond an external signal directed to it causing inner valve to move accordingly hence to control flow rate of fluid by positioning the control valve. 2) To provide support for valve accessories e.g. limit switches, solenoid valves. CLASSIFICATION OF ACTUATOR : Actuators are available in various forms to suit the particular requirement process control. It can be classified into three main categories. 1. Pneumatic actuators 2. Hydraulic actuators
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
3. Electrical actuators
PNEUMATIC ACTUATORS: Pneumatic system used compressed air as working fluid. Pneumatic signal are used to actual large values and other high power control device. Pneumatic actuators can produce large force or torque. TYPE OF PNEUMATIC ACTUATORS:There are to types of pneumatic actuators 1. Diaphragm actuator 2. Piston actuators
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
PISTON ACTUATORS: Piston actuator is also know as cylinder actuator the cylinder actuator can over come the high pressure drops when used in with value positioned. The air pressure alone or spring cylinder combination is used for proportioning or positioning control values. TYPES OF PISTON ACTUATORS: There are two types of piston actuators 1. Single acting piston actuator. 2. Double acting piston actuator. HYDRAULIC ACTUATORS: Hydraulic actuators are preferred where large forces are required the basic principal is same as pneumatic actuators except the working fluid used in hydraulic actuators an incompressible fluid is used to develop the pressure this pressure can be made very large by adjustment of the area of the forcing piston .Mostly used fluid in hydraulic actuators is oil pressurized oil is provided by a pump driven by an electric motor. Pressurized fluid drives a piston in a cylinder where the conversion of energy of compressed fluid into mechanical work is done. A cylinder hydraulic actuator is a linear type actuator. TYPE OF HYDRAULIC CYLINDER ACTUATORS: The hydraulic cylinder actuator can be of two types 1. Single acting cylinder. 2. Double acting cylinder.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
ELECTRICAL ACTUATOR: Electrical actuator requires electrical signal for its operation the electrical signal can be AC or DC type electrical actuator works on the principal of electromagnetic induction commonly used electrical actuators are solenoid relay AC motor, DC motor etc. APPLICATIONS 1. Control of air for use in pneumatic cylinder. 2. Control of oil for use in hydraulic cylinder. 3. In home appliances washing machine valves. 4. Commercial use For measuring oil, kerosene etc. 5. Automobile Latches (doors)
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
EXPERIMENT NO. 8 TITLE: TYPES OF FLIP-FLOPS. AIM: To study different types of Flip-Flops. APPARATUS: Different types of Flip-Flops. THEORY: SEQUENTIAL LOGIC: Combinational logic devices generate an output based on the input values independent of the input timing. With sequential logic devices however, the timing or sequencing of the input signals is important. Device in this class include
flip-flops, counters, mono stables, latches and more complex devices such as microprocessors. Sequential logic devices usually respond to inputs when a separate trigger signal transitions from one level to another. The trigger signal is usually referred to as the clock (CK) signal. The clock signal can be a periodic square wave or a periodic collection of pulses. Fig. illustrates edge terminology in relation to a clock pulse where an arrow is used to indicate edges where state transitions occur. Positive edge triggered devise respond to low-to-`high (0 to 1) transition and negative edge triggered devices respond to a high to low (1 to 0) transition. FIG: CLOCK PULSE EDGES
LOGIC LEVEL: HIGH
1
-VE EDGE +VE EDGE -VE EDGE +VE EDGE
0
LEVEL: LOW
FLIP-FLOPS: Since digital data is stored in the form of bits, digital memory devices such as computer Random access memory (RAM) require a means for storing and switching between two binary states. A flip-flop is a sequential logic device that can perform this function. The flip flop is called bi-stable devices since it has two and only a two possible stable out put states: 1 (high) and (low). It has the capability of remaining
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
in a particular output State. This is the basis of all semiconductor information storage and processing in digital computer; in fact, flip-flops performs many of the basic function critical to the operation of almost all digital devices RS FLIP-FLOP: A fundamental flip flop, an RS flip flop, is schematically shown in fig below. S is the set input, r is the reset input, and Q and Q1 are the complementary output. Most of the flip-flops include both outputs where one out put is the inverse (NOT) of the other. The RS flip flop operates based on the following rules. 1. As long as the input S and R are the both 0, output of flip-flop remains unchanged. 2. When S is 0 and R is 1, the flip-flop is reset to Q=1 and 1=0. 3. When S is 0 and R is 1, the flip-flop is reset to Q=0 and 1=1. 4. It is not allowed (NA) to place a 1 on S and R simultaneously since the out put will be unpredictable.
Fig. RS FLIP-FLOP INTERNAL DESIGN
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
A truth table is a valuable tool for describing the functionality of flip-flops. The truth table for basic RS flip flop is given in table; Q0 is the values of the output before the indicated input condition were established. 1 is logic high and 0 is low. The NA is the last row indicates that the input condition for that row is not allowed. Because we are precluded from applying the S=1 R-1 input condition. The RS flip flop is seldom used in actual designs. Other more versatile flip-flops that avoid the NA limitation are presented in subsequent sections. To understand how flip flops and other sequential logic circuits function, look at the internal design of an RS flip flop illustrated in fig. It consists of combinational logic gates with internal feedback from the output to input of the NAND gates. Fig. illustrates the timing of various signals, which are affected by very short propagation delays through the NAND gates. Immediately after signal R transitions from 0 to 1, the input to the lower NAND gate are 0 and Q, which is still 1. This changes Q1 to 1 after a slight prorogation delay dt1. Feedback of Q1 to the top NAND gate drives Q to 0 after a slight delay dt2. Now the flip flop is reset, and it remains in this state even after R returns to 0. The set operation functions in a similar manner. The propagation delays dt1 and dt2 are usually in the Nano second range. All sequential logic devices depend on feed back and propagation delays their operation.
TABLE: TRUTH TABLE FOR RS FLIP-FLOP
INPUTS S 0 1 0 1 R 0 0 1 1 Q QO 1 0
OUTPUTS Q1 QO 0 1 NA
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
Fig. TIMING DIAGRAM RS FLIP-FLOP
S R
Q dt1 dt2 Q1 TRIGGERING OF FLIP-FLOPS: Flip-flop is usually clocked; that is a master signal in the circuit coordinates the changes of the output state of the devices. This allows design of complex circuits such as a microprocessor where all system changes are triggered by a common clock signal. This is called synchronous operation since changes in state are coordinated by the clock pulses. The output of different types of clocked can change on either a positive edge or a negative edge of a clock pulse. These flip flops are termed edge triggered flip flops. Positive edge triggering is indicated schematically by a small angle bracket on the clock input to the flip-flop. Negative edge triggering is indicated schematically by small circle and angle bracket on the clock input. The function of the edge triggered RS flip flop is defined by the following rules 1. If S and R are both 0 when the clock edge is encountered, the output state remains unchanged. 2. If S is 1 and R is 0 when the clock edge is encountered the flip-flop output is set to 1. If the output is at 1 already, there is no change 3. If S is 0 and R is 1 when clock edge is encountered, the flip-flop output is reset to 0. If the output is at 0 already there is no change. 4. S and R should never both be 1 when the clock edge is encountered
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
CK
CK
Q1
Q1
Fig: POSITIVE EDGE TRIGGERED
Fig: NEGATIVE EDGE TRIGGERED
The truth table for a positive edge triggered RS flip flop is given in table below. The up arrow in the clock (CK) column represents the positive edge transition from 0 to 1. The NA is in the second to the last row indicates that the input condition for that row is not allowed. As long as there is no positive edge transition, the values of S and R have no effect on the output as shown by the x symbols in the last row of the table. A timing diagram is shown in fig.
TABLE: POSITIVE EDGE TRIGGERED RS FLIP-FLOP TRUTH TABLE
S 0 1 0 1 X
R 0 0 1 1 X
CK
Q QO 1 0 NA
Q1 QO1 0 1
0,1
QO
QO1
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
There are special devices that are not edge triggered in the way just described. An important example is called a latch. D FLIP FLOP: The D flip-flop, also called as data flip flop, has a signal input D whose value is stored and presented at the output Q at the edge of the clock pulse. A positive edge triggered D flip-flop is illustrated in fig. and its truth table is given in table. Unlike a latch D flip flop dose not exhibit transparency. The out put changes only when triggered by appropriate clock edge D Q
CK
Q1
Fig: POSITIVE EDGE TRIGGERED D FLIP-FLOP JK FLIP FLOP: The JK flip-flop is similar to the RS flip-flop, where the J is analogous to the S input and the K analogous to the R input. The major difference is that the J and K inputs may both be high simultaneously. This causes the output to toggle which means the output changes to opposite state. The schematics representation and truth for a negative edge triggered JK flip flop are shown in fig. In table the first two rows of the table describe the present or clear functions that can be used to initialize the output of the flip- flop. The third row precludes setting and clearing simultaneously. The symbol down arrow represents the negative edge of the clock Signal which causes the change in the output. The last row describes the memory feature of the flip flop in the absence of negative edge. The JK flip flop has a wind range of applications and all flip-flops can easily be constructed from it, with proper external wiring.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
The T toggle flip-flop serves as good example of this. The T flip- flop simply toggles the output every time it is triggered. The preset and clear functions are necessary to provide direct control over the output since the T input alone provides no mechanism for initialization of the output value. The truth table is given in table
PRESET
CK
CLEAR
Q1
Fig: NEGATIVE EDGE TRIGGERED JK FLIP-FLOP
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
TABLE: NEGATIVE EDGE TRIGGERED JK FLIP-FLOP TRUTH TABLE
PRESET 0 1 0 1 1 1 1 1
CLEAR 1 0 0 1 1 1 1 1
CK X X
J X X
K X X NA
Q 1 0
Q1 0 1
0 1 0 1 0,1 X
0 0 1 1 X
QO 1 V TOGGLE QO
QO1 0 1
QO1
CONCLUSION: Hence we have studied different types of flip-flops.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
EXPERIMENT NO. 9 TITLE: OPERATIONAL AMPLIFIER CIRCUIT AND ITS APPLICATIONS.
AIM: To study Operational Amplifier circuit and its applications in different modes. APPARATUS: Operational Amplifier THEORY: The term operational amplifier, abbreviated op amp, was coined in the 1940s to refer to a special kind of amplifier that, by proper selection of external components, can be configured to perform a variety of mathematical operations. Early op amps were made from vacuum tubes consuming lots of space and energy. Later op amps were made smaller by implementing them with discrete transistors. Today, op amps are monolithic integrated circuits, highly efficient and cost effective. An amplifier has an input port and an output port. In a linear amplifier, Output signal = A * input signal
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
Where A is the amplification factor or gain. Depending on the nature of input and output signals, we can have four types of amplifier gain, Voltage (voltage out/voltage in), Current (current out/current in), Transresistance (voltage out/current in), and Transconductance (current out/voltage in) 741 OPERATIONAL AMPLIFIER: The 741 is a general-purpose operational amplifier featuring offset-voltage null capability. The high common-mode input voltage range and the absence of latch-up make the amplifier ideal for voltage-follower applications. The device is short-circuit protected and the internal frequency compensation ensures stability without external components. A low value
potentiometer may be connected between the offset null inputs to null out the offset voltage. The 741C is characterized for operation from 0C to 70C. The 741I is characterized for operation from 40C to 85C. The 741M is characterized for operation over the full military temperature range of 55C to 125C.
IDEAL OPERATIONAL AMPLIFIER: Ideal operational amplifiers have infinite gain. If the voltage at the +ve terminal is larger than the voltage at the ve terminal then the output voltage will increase until it reaches the positive power supply. Likewise, if the voltage at the +ve terminal is smaller than the voltage at the -ve terminal then the output voltage will decrease until it reaches the negative power supply. Of course, if both terminals are equal, the output will no longer be driven by the op amp. These
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
characteristics allow feedback to be used in order to drive the output of the op amp to a useful value. Gain: The primary function of an amplifier is to amplify, so the more gain the better. It can always be reduced with external circuitry, so we assume gain to be infinite. Input Impedance: Input impedance is assumed to be infinite. This is so the driving source wont be affected by power being drawn by the ideal operational amplifier. Output Impedance: The output impedance of the ideal operational amplifier is assumed to be zero. It then can supply as much current as necessary to the load being driven. Response Time: The output must occur at the same time as the inverting input so the response time is assumed to be zero. Phase shift will be 180. Frequency response will be flat and bandwidth infinite because AC will be simply a rapidly varying DC level to the ideal amplifier. Offset: The amplifier output will be zero when a zero signal appears between the inverting and non-inverting inputs.
NON INVERTING AMPLIFIER: Non inverting amplifiers are very powerful because you can amplify a signal without having a negative rail (depending on the op amps specifications). When a voltage is applied to Vin, Vout begins to rise because of the infinite amplification. This rising voltage is consequently applied across the voltage divider of R1 and R2 in such a way that the voltage at the negative terminal of the op amp begins to rise as well. Once the voltage at the negative terminal has reached the same value as the positive terminal, the amplification stops and Vout remains constant. If for some reason the output voltage is pushed further up, the voltage at R 1 will go up causing the op amp to have a negative voltage across it and pull Vout back down again. The formula expressing the ideal Vout is Vout = Vin (R1+R2/R1)
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
NON INVERTING PEAK DETECTOR: Peak detectors allow you to determine the highest voltage value that a signal produces over a period of time. The one shown here does not do precisely this, but for many slowly varying signals it is good enough. The diode located at the output of the op amp allows the op amp to add charge to the capacitor C while not allowing it to discharge the capacitor. Because of this, V out will rise until both the -ve and +ve terminals of the op amp are equal. Then, if Vin drops, the op amp will no longer be pumping charge into the capacitor, and the resistor R will allow charge to slowly escape and the voltage at Vout to drop. R and C must be picked based on how fast you want Vout to drop after detecting a peak.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
INVERTING AMPLIFIER: Inverting amplifiers invert your signal and, as a result, require a negative power supply (assuming Vin is positive). In this circuit, the current flowing from Vin goes through both R1 and R2. As you can see from the location of the +ve and -ve terminals, the op amp will pull down Vout until the voltage at the ve terminal is equal to ground. Once this happens Vout can be found by the following equation Vout Vin [R2/R1]
INVERTING VOLTAGE ADDER: The inverting voltage adder is based on the exact same principle as the inverting amplifier. The op amp pulls Vout down such that the -ve terminal is the same as ground and the currents produced by V1 and V2 both add at the negative terminal and produce a summed voltage drop across the third resistor on the way to Vout. Thus Vout can be calculated by the following equation Vout = - (V1 + V2) Additional voltage inputs can also be tied to the -ve terminal if necessary.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
INTEGRATOR: If a capacitor is used as the feedback element in the inverting amplifier, shown in figure, the result is an integrator. An intuitive grasp of the integrator action may be obtained from the statement under the section, Current Output, that current through the feedback loop charges the capacitor and is stored there as a voltage from the output to ground. This is a voltage input current integrator.
DIFFERENTIATOR: Using a capacitor as the input element to the inverting amplifier, figure, yields a differentiator circuit. Consideration of the device in next figure will give a feeling for the differentiator circuit. It should be mentioned that of all the circuits presented in this section, the differentiator is the one that will operate least successfully with real components. The capacitive input makes it particularly susceptible to random noise and special techniques will be required for remedying this effect.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
CONCLUSION: Hence we have studied a basic operational amplifier and its applications in various modes.
DEPARTMENT OF MECHANICAL ENGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
EXPERIMENT NO. 10 TITLE: ANALOG TO DIGITAL AND DIGITAL TO ANALOG CONVERTER
AIM: To study Analog to Digital and Digital to Analog Converter. THEORY: ANALOG TO DIGITAL CONVERTERS: A/D converters are designed based on a number of different principles: successive approximation, flash or parallel encoding, single slope and dual slope integration, switched capacitor and delta sigma. We considered the first two because they occur most often in commercial designs. The successive approximation A/D converter is Very widely used because it is relatively fast and cheap. It uses a D/A converter (DAC) in a feedback loop. DACs are described in the next section. When the start signal is applied, the sample and hold (S&H) amplifier latches the analog input. Then the control unit begins interactive process, the digital value is approximated, converted to an analog value with the D/A converter, and compared to the analog input with the computer. When the D/A converter output equal to the analog input, the end signal is set by control unit and the correct digital output is available at the output. If n is the resolution of A/D converter it take n steps to complete the conversion. More specifically ,input is compared to combinational of binary fraction (1/2 1/8 ..,1/2 N) of the full scale (FS) value of the A/D converter. The control unit first turns on the most significant bit (MSB) of the register, leaving all lesser bits at the 0, and the comparator test the DAC output against the analog input. If the analog input exceeds DAC output, the MSB is left on (high); otherwise, it is reset to 0. This procedure is then applied to the next lesser significant bits and comparison is made again. After n comparisons have occurred, the converter is down to the least significant bits (LSB). The output of the DAC then represents the best digital approximation to the analog input. When the process terminates, the control unit sets end signal signifying the end of conversion. As an example, a 4 bits successive approximation procedure is illustrated graphically. The MSB is 1/2 FS, which in this
DEPARTMENT OF MECHANICAL EGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
case is grater than the signal; therefore, the bit is turned off. The second bit is FS and is less than the signal so it is left ON, The third bit is given +1/8 of FS which is still less then the analog signal, so the third bit is left on. The fourth provide (1/4+1/8+1/16) of FS and is greeter than the signal, so the fourth bit is turned OFF and the conversion is completed. The digital result is 0110. Higher resolution would produce a more accurate value. An n bits successive approximation A/D converter has a conversion time of n dt, where dt is the cycle time for 12 bits successive approximation A/D converters range form 1 to 100 micron. The faster type of A/D converter is known as a flash converter. As fig illustrates, it consist of bank of input comparators acting parallel to identify the signal level. The output of the latches is in a coded form easily converted to the required binary output with combinational logic. The flash converter illustrated in fig is a 2 bit converter having resolution of four output states. Table listed the comparator output coded and corresponding binary output for each of the state assuming an input voltage range of 0 to 4v. The voltage range is set by the Vmin and Vmax supply voltage shown
in fig. The code converter is simple combinational logic circuit. For the 2 bit converter the relationship between the codes bites Gi and binary bits Bi are B0 = G0.G1+ G2 B1 = G1
DEPARTMENT OF MECHANICAL EGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
Several analog signals can be digitized by single A/D converter if the analog signals are multiplexed at the input to the A/D converter. An analog multiplexer simply switches among several analog input using transistors or relay and control Signals. This can significantly reduce cost of the system design. In addition to cost other parameter important is selecting an A/D converter is the input voltage range, resolution, and conversion time.
DIGITAL TO ANALOG (D/A) CONVERSION: Often we need to reverse the process of A/D conversion by changing digital value to analog voltage. This is called digital to analog conversion. A D/A converter allow a computer or other digital devices to interface with external analog circuit and devices. The simplest type of D/A converter is resistor ladder network connected to an inverting summer op amp circuit as shown in fig. This particular converter is a 4 bits R-2R resistor ladder network. It differs form others possible resistor ladder network, in that it requires two precision resistance value. The digital input to the DAC is a 4 bits binary number represented by bits b0 b1 b2 and b3 where b0 is least significant bit and b3 is the most significant bits. Each bit in the circuit controls a switch between ground and the inverting input of the op amp.
DEPARTMENT OF MECHANICAL EGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
To understand how analog output voltage Vout related to the input binary number we can analyze the four different input combinations 0001 0010 0100 and 1000 and apply the principle of the super position for arbitrary 4 bits binary numbers. If the binary number is 0001, the b0 switch is connected to the op amp and the other bits switches are grounded. The resulting circuit as shown in fig. Switches are grounded, since the non inverting input of the op amp is grounded, the inverting input is at the virtual ground. The resistance between node V0 and ground is R, which is parallel combination of two 2R value. Therefore, V0 is the result of voltage division of V1across two series resister of equal value R
DEPARTMENT OF MECHANICAL EGINEERING-VPCOE
MECHATRONICS-LABORATORY MANUAL
CONCLUSION: Hence we have studied A/D and D/A converter.
DEPARTMENT OF MECHANICAL EGINEERING-VPCOE
You might also like
- Seminar Project LVDT: - To Study The Basics, ConstructionDocument9 pagesSeminar Project LVDT: - To Study The Basics, ConstructionNaeem SaifNo ratings yet
- Principle of LVDT OperationDocument4 pagesPrinciple of LVDT OperationivanNo ratings yet
- Transistor and Voltage DividerDocument10 pagesTransistor and Voltage DividerAya SaleemNo ratings yet
- LVDT ManualDocument7 pagesLVDT ManualShankar ArunmozhiNo ratings yet
- 02-LVDT Trainer UITM-02 Range - 10mm NewDocument13 pages02-LVDT Trainer UITM-02 Range - 10mm Newhydromec_indiaNo ratings yet
- Questions and AnswersDocument15 pagesQuestions and AnswersMahtab GhummanNo ratings yet
- ICS Lab ManualDocument28 pagesICS Lab Manualashok_abclNo ratings yet
- DarshitDocument28 pagesDarshitdarkfire28304No ratings yet
- Practicas Digiac 1750 2Document26 pagesPracticas Digiac 1750 2Cristy De Jesus GonzalezNo ratings yet
- Important Report File Electricity Theft...Document32 pagesImportant Report File Electricity Theft...Jatinder SainiNo ratings yet
- LAB NO 04 Updated IE 05042021 111355pmDocument4 pagesLAB NO 04 Updated IE 05042021 111355pmFAISAL KHANNo ratings yet
- Experiment 11Document8 pagesExperiment 11Mihai BogdanNo ratings yet
- Design and Construction of A Low DC Voltage Power Supply UnitDocument28 pagesDesign and Construction of A Low DC Voltage Power Supply UnitRasaq Eneji Jimoh100% (1)
- What Is An LVDT (Linear Variable Differential Transformer) ?Document3 pagesWhat Is An LVDT (Linear Variable Differential Transformer) ?muhammad aliNo ratings yet
- Callibration of Transducers As Displacement SensorDocument13 pagesCallibration of Transducers As Displacement SensorPriyanshuNo ratings yet
- A5 EXPERIMENT LVDT and RVDTDocument14 pagesA5 EXPERIMENT LVDT and RVDTDuminduJayakodyNo ratings yet
- Practical ElectronicsDocument107 pagesPractical ElectronicsSaeed Ali Shahani100% (2)
- LVDT Lab ManualDocument3 pagesLVDT Lab Manualguruabhay100% (2)
- Induction Motor ProtectionDocument42 pagesInduction Motor Protectionjayonline_4u91% (11)
- Inverter Circuit ThoeryDocument8 pagesInverter Circuit ThoeryAbhishek SainiNo ratings yet
- CAD LAbDocument27 pagesCAD LAbSuraj KamyaNo ratings yet
- Measuring Position and Displacement With LVDTS: TutorialDocument5 pagesMeasuring Position and Displacement With LVDTS: TutorialpeterhassanNo ratings yet
- Transducer Manual NewDocument17 pagesTransducer Manual NewSARDAR PATELNo ratings yet
- Aditi Edc FileDocument54 pagesAditi Edc Filedamanpreetk.ee.20No ratings yet
- Microcontroller Based Low Cost Controlled Rectifiers Training Module For Power Electronics LaboratoryDocument4 pagesMicrocontroller Based Low Cost Controlled Rectifiers Training Module For Power Electronics LaboratoryJubari FikriNo ratings yet
- Single Phase Induction Motor Soft Start by Stepped Delay of Reducing Firing AngleDocument68 pagesSingle Phase Induction Motor Soft Start by Stepped Delay of Reducing Firing AngleNarendraKumarNo ratings yet
- A ZVT-ZCT PWM Multiphase Synchronous Buck Converter With An Active Auxiliary Circuit For Low Voltage High Current ApplicationsDocument11 pagesA ZVT-ZCT PWM Multiphase Synchronous Buck Converter With An Active Auxiliary Circuit For Low Voltage High Current ApplicationsIJRASETPublicationsNo ratings yet
- LVDT - Working Principle Construction Types, Advantages and ApplicationsDocument11 pagesLVDT - Working Principle Construction Types, Advantages and ApplicationsKunal AhiwaleNo ratings yet
- Exp3 PLC 2020Document6 pagesExp3 PLC 2020Shahidan KirkukyNo ratings yet
- 19mt4251 SSC Manual FinalDocument49 pages19mt4251 SSC Manual FinalR.MADHU SUDHANAN HICET STAFF EIENo ratings yet
- Microcontroller Based ProjectDocument31 pagesMicrocontroller Based ProjectshashankfruNo ratings yet
- Performance Analysis of Diode Clamped Five-Level Inverter Integrated PV Grid System Using Soft Computing Based MPPT SchemeDocument11 pagesPerformance Analysis of Diode Clamped Five-Level Inverter Integrated PV Grid System Using Soft Computing Based MPPT SchemeIJRASETPublicationsNo ratings yet
- Protection of Three-Phase Induction MotorDocument9 pagesProtection of Three-Phase Induction Motoryisakabera123No ratings yet
- QB106455Document10 pagesQB106455sanjay sNo ratings yet
- Power System-IDocument25 pagesPower System-IKaran Veer Singh ButtatNo ratings yet
- Magneto Optic Current TransformerDocument19 pagesMagneto Optic Current TransformerNandaKiran100% (1)
- DECE Lab IeDocument7 pagesDECE Lab IemurthyNo ratings yet
- ReportDocument15 pagesReportGavaine MattisonNo ratings yet
- Unit 1Document8 pagesUnit 1ChhaviNo ratings yet
- PNEUmatic Crane NewDocument26 pagesPNEUmatic Crane NewVignesh VaranNo ratings yet
- 5kv InverterDocument30 pages5kv InverterOjobo BlessingNo ratings yet
- Industrial AutomationDocument38 pagesIndustrial Automationvineet ChoudharyNo ratings yet
- Speed Checkers For HighwaysDocument35 pagesSpeed Checkers For HighwaysKarthik Mvs100% (1)
- Ps Lab ManualDocument132 pagesPs Lab ManualRamkrishnaNo ratings yet
- Volume 2 Issue4Document14 pagesVolume 2 Issue4Mihir PrajapatiNo ratings yet
- Touch Switch Project ReportDocument13 pagesTouch Switch Project ReportGaurav Kumar60% (15)
- Design Sine Wave InverterDocument11 pagesDesign Sine Wave InverterAli MontielNo ratings yet
- FEFEVDocument23 pagesFEFEVby9wxf77rvNo ratings yet
- TheftDocument12 pagesTheftEmeka Nelson OffornedoNo ratings yet
- Design of Single Phase Inverter Using Dspic30F4013: Mr. R.SenthilkumarDocument7 pagesDesign of Single Phase Inverter Using Dspic30F4013: Mr. R.SenthilkumarsureshhdreamNo ratings yet
- Measuring Position and Displacement With LVDTS: 1. What Is Linear Displacement MeasurementDocument4 pagesMeasuring Position and Displacement With LVDTS: 1. What Is Linear Displacement MeasurementJelena GavanskiNo ratings yet
- Power System-II EE-328-FDocument24 pagesPower System-II EE-328-FAbhilash GauravNo ratings yet
- Department of Electronics and InstrumentationDocument15 pagesDepartment of Electronics and InstrumentationRajeshwariNo ratings yet
- Manual of PROFLOW 5000Document32 pagesManual of PROFLOW 5000AMEY MALVENo ratings yet
- Elec 2 Report FinalDocument17 pagesElec 2 Report FinalMamoon KhanNo ratings yet
- Project Report of Power Electronics Lab: Project Title: 9-Level Inverter Using ArduinoDocument17 pagesProject Report of Power Electronics Lab: Project Title: 9-Level Inverter Using ArduinoAhmadNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Sasi KumarDocument3 pagesSasi Kumarkks2810No ratings yet
- Final Practical Shedule April-May 2015Document6 pagesFinal Practical Shedule April-May 2015kks2810No ratings yet
- Web 4-2-15 To 28-2-15Document3 pagesWeb 4-2-15 To 28-2-15kks2810No ratings yet
- Web 1-3-15 To 25-3-15Document3 pagesWeb 1-3-15 To 25-3-15kks2810No ratings yet
- II Mech Arear List From I To IiisemDocument8 pagesII Mech Arear List From I To Iiisemkks2810No ratings yet
- Fabrication of AutomatedDocument6 pagesFabrication of Automatedkks2810No ratings yet
- Course Contents BS-Physics (2018-22) - 1-1 2Document33 pagesCourse Contents BS-Physics (2018-22) - 1-1 2rabeaNo ratings yet
- A Physics-Based Thermal Circuit Model For FinfetsDocument13 pagesA Physics-Based Thermal Circuit Model For FinfetsDhruv VermaNo ratings yet
- Report On Linux or VHDLDocument45 pagesReport On Linux or VHDLkiteankurgangwarNo ratings yet
- CSBS Syllabus Sem 2 - 8SemPattern - 160 CreditDocument23 pagesCSBS Syllabus Sem 2 - 8SemPattern - 160 CreditAtul BarveNo ratings yet
- Diamond ChipDocument32 pagesDiamond ChipShaik Sharief0% (1)
- Leuze 18b03gbDocument2 pagesLeuze 18b03gbSumith VkNo ratings yet
- Test Methods and PracticesDocument30 pagesTest Methods and PracticesBảo BìnhNo ratings yet
- Two-Level Temperature Switch Circuit With LM358Document10 pagesTwo-Level Temperature Switch Circuit With LM358zigmund zigmundNo ratings yet
- RF Transistors Data Book 1997Document23 pagesRF Transistors Data Book 1997Marcos QuequeNo ratings yet
- 08 Lecture Power Transistors (IGBT)Document22 pages08 Lecture Power Transistors (IGBT)Abid Hasan HimelNo ratings yet
- 6.884 Complex Digital Systems: Spring 2005Document33 pages6.884 Complex Digital Systems: Spring 2005Ehtesham Ali KhanNo ratings yet
- Electronics and Communication MG University Syllabus.Document77 pagesElectronics and Communication MG University Syllabus.Anil RVNo ratings yet
- Silicon PNP Power Transistors: Savantic Semiconductor Product SpecificationDocument4 pagesSilicon PNP Power Transistors: Savantic Semiconductor Product Specificationcriman45No ratings yet
- 398 - BSC Physics Semester VI KUDocument12 pages398 - BSC Physics Semester VI KUaviNo ratings yet
- EE 313 Electronics LaboratoryDocument2 pagesEE 313 Electronics Laboratorymagdy bakryNo ratings yet
- Igbt PDFDocument16 pagesIgbt PDFPablo AllosiaNo ratings yet
- Secrets of Level-Translation Revealed - EE TimesDocument1 pageSecrets of Level-Translation Revealed - EE Timesalguien1972No ratings yet
- EEE231 Electronics-1 Lab 6, FA20-BEE-3C-146Document8 pagesEEE231 Electronics-1 Lab 6, FA20-BEE-3C-146Souban JavedNo ratings yet
- Ee8552 Power Electronics MCQDocument21 pagesEe8552 Power Electronics MCQSandesh DalviNo ratings yet
- Ict G9 L1 Week 1 PowerpointDocument24 pagesIct G9 L1 Week 1 PowerpointReymond BallesterosNo ratings yet
- Contactless Liquid Level ControllerDocument37 pagesContactless Liquid Level Controllerkitty100% (1)
- Data SheetDocument5 pagesData Sheetpartgio100% (1)
- 2N2222A MotorolaDocument6 pages2N2222A MotorolaRucelle Chiong GarcianoNo ratings yet
- Mosfet en DetalleDocument66 pagesMosfet en DetallecuervocrowNo ratings yet
- Automatic Lighting SystemDocument10 pagesAutomatic Lighting Systempanjala ruthvikNo ratings yet
- Module ElectronicsDocument20 pagesModule ElectronicsCart KartikaNo ratings yet
- IGCSE Physics Exam Revision NotesDocument34 pagesIGCSE Physics Exam Revision NotesCoolman Poon88% (17)
- Mje 13001Document3 pagesMje 13001emanr zNo ratings yet
- Debre Markos University Institute of Technology School of Electrical and Computer Engineering Computer Engineering (PG)Document10 pagesDebre Markos University Institute of Technology School of Electrical and Computer Engineering Computer Engineering (PG)enidegNo ratings yet
- Chapter One 1.1 Background of The StudyDocument43 pagesChapter One 1.1 Background of The StudyAmeerMuaviaNo ratings yet