You might also like
- An Overview of Banner's Extensive Knowledge-Base: First EditionDocument16 pagesAn Overview of Banner's Extensive Knowledge-Base: First EditionSilvia_282008roNo ratings yet
- Opto-electronic Sensors GuideDocument30 pagesOpto-electronic Sensors Guidediegob_2No ratings yet
- Photoelectric Sensor SolutionsDocument13 pagesPhotoelectric Sensor SolutionsHa RbNo ratings yet
- Man Mic Basics Photoelectric en A22 DRW 950369 02 000Document10 pagesMan Mic Basics Photoelectric en A22 DRW 950369 02 000Leoned Cova OrozcoNo ratings yet
- Keyence FS2 60Document10 pagesKeyence FS2 60ntdien923No ratings yet
- What Is A SensorDocument17 pagesWhat Is A SensorPatil Amol PandurangNo ratings yet
- DEE 3323.13 Sensor2Document88 pagesDEE 3323.13 Sensor2nabilo20No ratings yet
- ProximitySensors Lec1Document17 pagesProximitySensors Lec1Atharva SoniNo ratings yet
- Fundamentals of Photoelectric SensorsDocument6 pagesFundamentals of Photoelectric SensorsKimo KimoNo ratings yet
- Stray Light - Measurement and Effect On Performance in UV-Visible SpectrophotometryDocument2 pagesStray Light - Measurement and Effect On Performance in UV-Visible SpectrophotometryRogerio CaldorinNo ratings yet
- Photoelectric SensorDocument3 pagesPhotoelectric SensorAmarnath M DamodaranNo ratings yet
- S Petro Photo MeterDocument42 pagesS Petro Photo MeterAMASMNo ratings yet
- Chapter 2 (Part B) Instruments For Optical Absorption MeasurementsDocument38 pagesChapter 2 (Part B) Instruments For Optical Absorption MeasurementsaisyahNo ratings yet
- Proximity SensorsDocument3 pagesProximity SensorsSaurabh SrivastavaNo ratings yet
- Uv VisDocument6 pagesUv VisTannecia BenjaminNo ratings yet
- Sensors Installed Across The Conveyor Emitting Diffused Beams Causing Detection in All Four (4) Sensors Installed in The Tray Pusher SectionDocument15 pagesSensors Installed Across The Conveyor Emitting Diffused Beams Causing Detection in All Four (4) Sensors Installed in The Tray Pusher SectionKram Alim VillonNo ratings yet
- Single-Ended Reflected Beam Smoke Detector: Applications GuideDocument8 pagesSingle-Ended Reflected Beam Smoke Detector: Applications GuideAnonymous 8RFzObvNo ratings yet
- Color Wavelength NM Violet Blue Cyan Green Yellow Orange RedDocument4 pagesColor Wavelength NM Violet Blue Cyan Green Yellow Orange RedJhenard John Lansangan BeltranNo ratings yet
- Interpreting Engineering Data: Through-Beam Sensors and Retro-Reflective SensorsDocument5 pagesInterpreting Engineering Data: Through-Beam Sensors and Retro-Reflective Sensorsotomasi industriNo ratings yet
- Interpreting Engineering Data: Through-Beam Sensors and Retro-Reflective SensorsDocument5 pagesInterpreting Engineering Data: Through-Beam Sensors and Retro-Reflective Sensorsotomasi industriNo ratings yet
- Spetrophotometer 090415095014 Phpapp02Document42 pagesSpetrophotometer 090415095014 Phpapp02anujaNo ratings yet
- Chapter 4 Analytical MethodsDocument104 pagesChapter 4 Analytical MethodsCL SanchezNo ratings yet
- Introduction to Analytical Techniques: SpectrophotometryDocument42 pagesIntroduction to Analytical Techniques: SpectrophotometryFrankenstein MelancholyNo ratings yet
- 2-UV-Vis Molecular SpectrometryDocument27 pages2-UV-Vis Molecular SpectrometryWahyuni EkaNo ratings yet
- Optical Proximity SensorsDocument8 pagesOptical Proximity SensorsKhoyrul Huda0% (1)
- C08 Rme PPT1 21221Document45 pagesC08 Rme PPT1 21221DHANANJAY VIJAYKUMAR BILENo ratings yet
- Automation Book V6Document56 pagesAutomation Book V6ramonemiquelNo ratings yet
- rangefinderDocument13 pagesrangefinderRabi khanNo ratings yet
- Siemens 3RG7404 0CH00 DatasheetDocument54 pagesSiemens 3RG7404 0CH00 DatasheetManea George-CristianNo ratings yet
- Photoelectric Sensors: Technical SupportDocument8 pagesPhotoelectric Sensors: Technical SupporttadyNo ratings yet
- Lecture 2 - Instruments For Optical SpectrosDocument19 pagesLecture 2 - Instruments For Optical SpectrosBelay HaileNo ratings yet
- The Principle of A UV SpectrometerDocument4 pagesThe Principle of A UV SpectrometerVignesh AmrNo ratings yet
- The Photoelectric Handbook: Comprehensive Application and Technology ReferenceDocument28 pagesThe Photoelectric Handbook: Comprehensive Application and Technology ReferenceWilliam BuchananNo ratings yet
- SENSORS Types and ClassificationsDocument5 pagesSENSORS Types and ClassificationsRoderick Rodaje Jr.No ratings yet
- InstrumentationDocument4 pagesInstrumentationRainneTayNo ratings yet
- SpectrophotometryDocument40 pagesSpectrophotometryMUKESH SUNDARARAJANNo ratings yet
- Nephelometry and Turbidimetry: Cls 332 Lab 4Document13 pagesNephelometry and Turbidimetry: Cls 332 Lab 4xxxxxxxNo ratings yet
- Nephelometry and Turbidimetry: Cls 332 Lab 4Document13 pagesNephelometry and Turbidimetry: Cls 332 Lab 4Ita Maghfirah100% (1)
- Analytical Instrumentation ConceptsDocument20 pagesAnalytical Instrumentation ConceptsshashankNo ratings yet
- Optical SensorsDocument9 pagesOptical SensorsrthrbyNo ratings yet
- Proximity SensorsDocument9 pagesProximity SensorsSONAL P JOSEPH 1561363No ratings yet
- Advanced Spectroscopy: 1. General AspectsDocument56 pagesAdvanced Spectroscopy: 1. General AspectsMohamed DahmaneNo ratings yet
- Ultraviolet Visible SpectrophotometerDocument11 pagesUltraviolet Visible Spectrophotometerapi-246263792No ratings yet
- Laser MetrologyDocument41 pagesLaser MetrologyjennybunnyomgNo ratings yet
- Main Components of a SpectrophotometerDocument12 pagesMain Components of a SpectrophotometerMuhammad RamzanNo ratings yet
- Optical Sensor Basics and Applications: Types of Optical SensorsDocument8 pagesOptical Sensor Basics and Applications: Types of Optical SensorsVaishnavi TripathiNo ratings yet
- FFE Pocket Guide V5Document18 pagesFFE Pocket Guide V5kskadryNo ratings yet
- Spectrophotometers: Robert M. DondelingerDocument6 pagesSpectrophotometers: Robert M. DondelingerJorge SaenzNo ratings yet
- Paper For Upload PDFDocument6 pagesPaper For Upload PDFAnonymous uJpBMLqHNo ratings yet
- Jeevan 3Document13 pagesJeevan 3Praveen HariNo ratings yet
- OPTICAL SENSORS CONVERT LIGHT INTO SIGNALSDocument7 pagesOPTICAL SENSORS CONVERT LIGHT INTO SIGNALSRaphael IbrahNo ratings yet
- Proximity SensorsDocument4 pagesProximity SensorsRohit Kumar SinghNo ratings yet
- SPECTROPHOTOMETER MODERN LABDocument21 pagesSPECTROPHOTOMETER MODERN LABBaim Black RushNo ratings yet
- Spectrophotometry: Basic Concepts, Instrumentation and ApplicationDocument41 pagesSpectrophotometry: Basic Concepts, Instrumentation and ApplicationHilmi Ölmez100% (2)
- LasersDocument10 pagesLasersVlad OnacaNo ratings yet
- Ultrasonic SensorTraining MaterialDocument15 pagesUltrasonic SensorTraining MaterialToan PhamNo ratings yet
- Shining a Light on Cool Standards: Infrared Spectroscopy Theory Explored.From EverandShining a Light on Cool Standards: Infrared Spectroscopy Theory Explored.No ratings yet
- Pneumatic SymbolsDocument2 pagesPneumatic SymbolsBharathprabhu100% (1)
- Process Control MMI ScreensDocument1 pageProcess Control MMI ScreensBharathprabhuNo ratings yet
- Pneumatic SymbolsDocument4 pagesPneumatic SymbolsBharathprabhuNo ratings yet
- IP RatingsDocument1 pageIP RatingsBharathprabhuNo ratings yet
- IP Rating DocumentDocument2 pagesIP Rating DocumentBharathprabhu100% (1)
- G CodesDocument3 pagesG CodesBharathprabhuNo ratings yet
- Hydraulic SymbolsDocument5 pagesHydraulic SymbolsBharathprabhu100% (4)
- Capacitive SensorsDocument6 pagesCapacitive SensorsBharathprabhuNo ratings yet
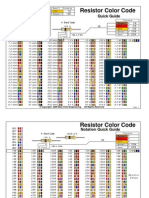
- Resistencias Codigo Colores PDFDocument2 pagesResistencias Codigo Colores PDF'Cesar Guel81% (16)
- RS-422 and RS-485Document43 pagesRS-422 and RS-485Satya Sai Babu YeletiNo ratings yet
- Basic Terms of RoboticsDocument4 pagesBasic Terms of RoboticsBharathprabhuNo ratings yet
- Ansi Asabe S261.7 Feb1989 (R2011)Document5 pagesAnsi Asabe S261.7 Feb1989 (R2011)StephanNo ratings yet
- Basic Principles Retroreflection R (Night Visibility) of Road Markings Caused by Glass BeadsDocument8 pagesBasic Principles Retroreflection R (Night Visibility) of Road Markings Caused by Glass BeadsEmmanuel FernandezNo ratings yet
- IALADocument17 pagesIALANikhil Yadav100% (1)
- Antenna Alignment With Theodolite, Lasers and Photogrammetry Date: 02.09.2014Document47 pagesAntenna Alignment With Theodolite, Lasers and Photogrammetry Date: 02.09.2014Lohith AnjaanNo ratings yet
- Renishaw XL-80 User Guide ENDocument130 pagesRenishaw XL-80 User Guide ENAyScribdNo ratings yet
- Manual KeyenseDocument3 pagesManual KeyenseSergio Romano PadillaNo ratings yet
- Operating Instructions SIMOCRANEDocument186 pagesOperating Instructions SIMOCRANEWhite Tiger100% (2)
- Euro Road LightingDocument83 pagesEuro Road LightingMoNa MatoutNo ratings yet
- Maintain SOLAS Compliance with Life Saving Appliance ManualDocument35 pagesMaintain SOLAS Compliance with Life Saving Appliance Manualzansue abutamNo ratings yet
- PVD Series Parts Verification Sensor: DatasheetDocument8 pagesPVD Series Parts Verification Sensor: DatasheetgabictbNo ratings yet
- Panasonic Nx5 Series User ManualDocument26 pagesPanasonic Nx5 Series User ManualHaris Khan KhailNo ratings yet
- Is 9457 2005 PDFDocument17 pagesIs 9457 2005 PDFnunukanta50% (2)
- H-6008-8500-02-A Operators Techmak and Maintenance 1Document60 pagesH-6008-8500-02-A Operators Techmak and Maintenance 1Leonel Mejia Larios100% (1)
- Sensors PDFDocument192 pagesSensors PDFAsith SavindaNo ratings yet
- Ordering Information: PET Bottle and Clear Material Photoelectric SensorDocument6 pagesOrdering Information: PET Bottle and Clear Material Photoelectric SensorPaola NoMás DicenNo ratings yet
- Banner Value BeamDocument20 pagesBanner Value BeamryanmackintoshNo ratings yet
- HPB Series Photoelectric Controls Specifications and Features GuideDocument9 pagesHPB Series Photoelectric Controls Specifications and Features GuideRusdian Hasbi RidhoNo ratings yet
- As 3790-1992 Portable Warning Triangles For Motor VehiclesDocument8 pagesAs 3790-1992 Portable Warning Triangles For Motor VehiclesSAI Global - APACNo ratings yet
- Autonics - BRQM400-DDTADocument5 pagesAutonics - BRQM400-DDTAVinoj RamakrishnanNo ratings yet
- Omron Photo Electric SensorDocument13 pagesOmron Photo Electric Sensorharishsharma22No ratings yet
- JKR Roadwork Spec - JKR-SPJ-1988 PDFDocument270 pagesJKR Roadwork Spec - JKR-SPJ-1988 PDFFa Dyla100% (3)
- Retro-Reflective Sensor: Ojp-Dpkg/So/AsDocument3 pagesRetro-Reflective Sensor: Ojp-Dpkg/So/AsYo YoNo ratings yet
- Series 9000 Photoelectric Sensors: Technical DataDocument10 pagesSeries 9000 Photoelectric Sensors: Technical DataRafael IbarraNo ratings yet
- Block 89 Khatima - SoR - MISCELLANEOUS PDFDocument21 pagesBlock 89 Khatima - SoR - MISCELLANEOUS PDFGirish lohaniNo ratings yet
- Uputstvo Za FireRay 2000Document16 pagesUputstvo Za FireRay 2000Ivan MihajlovicNo ratings yet
- Hand Book of Road Safety PDFDocument44 pagesHand Book of Road Safety PDFAshish KumarNo ratings yet
- Photoelectric Sensors Photoelectric Retro-Reflective Sensor, For Transparent Objects, Product Group W12-2Document4 pagesPhotoelectric Sensors Photoelectric Retro-Reflective Sensor, For Transparent Objects, Product Group W12-2thanh_cdt01No ratings yet
- Invisibility System Using Image Processing and Optical Camouflage TechnologyDocument4 pagesInvisibility System Using Image Processing and Optical Camouflage Technologyseventhsensegroup100% (1)
- Delineation Measures PDFDocument14 pagesDelineation Measures PDFlearnafrenNo ratings yet
- Product Catalog en 221024 Web CompressedDocument504 pagesProduct Catalog en 221024 Web Compressed최경현No ratings yet