You might also like
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?From EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?No ratings yet
- Stability Experiment 2 UpdateDocument7 pagesStability Experiment 2 UpdateApostrophe Fareez ImprezzaNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Experiment (2) : Metacentric Height of Floating Bodies: Hydraulics Lab (ECIV 3122) Islamic University - Gaza (IUG)Document8 pagesExperiment (2) : Metacentric Height of Floating Bodies: Hydraulics Lab (ECIV 3122) Islamic University - Gaza (IUG)G Sri SoumyaNo ratings yet
- Experiment 9Document2 pagesExperiment 92022me112No ratings yet
- Hydarulic Ex 2 DDocument16 pagesHydarulic Ex 2 DnnurulhassanNo ratings yet
- Dynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldFrom EverandDynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldNo ratings yet
- Metacentric Height of Ship ModelDocument4 pagesMetacentric Height of Ship ModelmitulkindNo ratings yet
- Rigid Body and Center of GravityDocument53 pagesRigid Body and Center of GravityKate Fane Diaz CaliwagNo ratings yet
- Unit 5 Buoyancy and StabilityDocument6 pagesUnit 5 Buoyancy and StabilityMOJALEFA JACOB MOLEFINo ratings yet
- Metacentric Height Apparatus ManualDocument11 pagesMetacentric Height Apparatus ManualmariyamsattarNo ratings yet
- Metacentric HeightDocument2 pagesMetacentric HeightsuryavigneNo ratings yet
- Fluid Mechanics-I Lab (MEEN 2217)Document10 pagesFluid Mechanics-I Lab (MEEN 2217)Razahamid904100% (1)
- Stability of A Floating Body!Document18 pagesStability of A Floating Body!M. ShayanNo ratings yet
- Fluid Mechanics: Statical Stability of Submerged Bodies ObjectivesDocument6 pagesFluid Mechanics: Statical Stability of Submerged Bodies ObjectivesRey VicencioNo ratings yet
- Chap 2 StabilityDocument5 pagesChap 2 StabilityLecico LosaNo ratings yet
- LX7 - Metacentric HeightDocument8 pagesLX7 - Metacentric Heightsweet mondayNo ratings yet
- 8 Rotation TorqueDocument3 pages8 Rotation TorqueJerome BedañoNo ratings yet
- Experiment 4 - Buoyancy (Done)Document7 pagesExperiment 4 - Buoyancy (Done)ptpl100% (1)
- Stability of A Floating Body: ME 337 Fluid Mechanics LabDocument18 pagesStability of A Floating Body: ME 337 Fluid Mechanics LabOk SokNo ratings yet
- TorqueDocument3 pagesTorquerf08dNo ratings yet
- Report 4Document6 pagesReport 4Paul Adrian JavénNo ratings yet
- Lab Seesion No 7Document11 pagesLab Seesion No 7m.sheraz malikNo ratings yet
- Turning Effects of Forces MomentsDocument7 pagesTurning Effects of Forces Momentsanwar9602020No ratings yet
- Metacentro de Un FlotadorDocument5 pagesMetacentro de Un FlotadorEmerson RodriguezNo ratings yet
- Igcse 15 TheturningeffectofforcesDocument23 pagesIgcse 15 TheturningeffectofforcesHany ElGezawyNo ratings yet
- Experiment 6Document5 pagesExperiment 6Lyka NaboaNo ratings yet
- Metacentric HeightDocument4 pagesMetacentric Heightanil chejaraNo ratings yet
- Metacentric HeightDocument4 pagesMetacentric Heightkriap95No ratings yet
- Archimedes' Principle: Figure 1. Two Views of A Body Immersed in A LiquidDocument14 pagesArchimedes' Principle: Figure 1. Two Views of A Body Immersed in A LiquidJohn GaviolaNo ratings yet
- PHYS 2425 Exp 8 ManualDocument7 pagesPHYS 2425 Exp 8 ManualMulangira MulangiraNo ratings yet
- Stability of Floating Bodies: Hydraulic Lab Practical - 2Document7 pagesStability of Floating Bodies: Hydraulic Lab Practical - 2tarumNo ratings yet
- EquilibriumandStabilityoftheUprightHumanBody Science Journal 4540Document11 pagesEquilibriumandStabilityoftheUprightHumanBody Science Journal 4540ChandraPrakashSinghNo ratings yet
- Stability of A Floating BodyDocument11 pagesStability of A Floating BodyAbdur RehmanNo ratings yet
- FR 6 - Conditions For EquilibriumDocument7 pagesFR 6 - Conditions For EquilibriumAngelica UyNo ratings yet
- Bouyancy Experimental SetDocument5 pagesBouyancy Experimental SetkoushikaerosNo ratings yet
- Center of GravityDocument9 pagesCenter of Gravityapi-26570979100% (2)
- Archimedes's Principle and Static Stability: 13.012 Hydrodynamics For Ocean EngineersDocument12 pagesArchimedes's Principle and Static Stability: 13.012 Hydrodynamics For Ocean Engineerslalithkumar145No ratings yet
- Mechanics PortionDocument55 pagesMechanics PortionRupak MandalNo ratings yet
- Instruction Manual: Equipment For Engineering EducationDocument10 pagesInstruction Manual: Equipment For Engineering Educations_nimalanNo ratings yet
- Chapter 5 - Centre of Gravity and Centroids: Lesson Outcome For This ChapterDocument15 pagesChapter 5 - Centre of Gravity and Centroids: Lesson Outcome For This ChapterLetshego Itumeleng MoahloliNo ratings yet
- Experiment 106: Uniform Circular MotionDocument7 pagesExperiment 106: Uniform Circular MotionJasmin DionisioNo ratings yet
- Labsheet StabilityDocument5 pagesLabsheet StabilityNur HamizahNo ratings yet
- Bending Lab Report FinalDocument21 pagesBending Lab Report FinalNasri JamaludinNo ratings yet
- Hydraul Expt#3Document7 pagesHydraul Expt#3JessicaTicseNo ratings yet
- Fig. 1 Alternate States of Equilibrium: (A) For Straight Axially-Loaded Column and (B) ForDocument4 pagesFig. 1 Alternate States of Equilibrium: (A) For Straight Axially-Loaded Column and (B) Forashok paulNo ratings yet
- 2.1 Displacement (External Load)Document40 pages2.1 Displacement (External Load)Adron Lim33% (3)
- Experiment. No. 4: Title of Experiment Equipment UsedDocument8 pagesExperiment. No. 4: Title of Experiment Equipment UsedHojoborolo ApuNo ratings yet
- Experiment 3: Metacentric HeightDocument12 pagesExperiment 3: Metacentric HeightYanskie JusainNo ratings yet
- Lab Session 4 MomDocument5 pagesLab Session 4 Momm.sheraz malikNo ratings yet
- Sem 3 - Lab Metacentric ApparatusDocument7 pagesSem 3 - Lab Metacentric ApparatusLuqman HakimNo ratings yet
- Centroid and Area Moments of InertiaDocument2 pagesCentroid and Area Moments of InertiaFatin Naqiya RoslanNo ratings yet
- Bakhtic of MechanicsDocument10 pagesBakhtic of Mechanicsabdul raoufNo ratings yet
- Double Integration MethodDocument10 pagesDouble Integration Methodmau_boi16100% (1)
- Chapter TwoDocument49 pagesChapter TwoAbenezer MarkNo ratings yet
- Buoyancy, Stability and Masses Subjected To AccelerationDocument12 pagesBuoyancy, Stability and Masses Subjected To AccelerationandreinaNo ratings yet
- Experiment Instructions: HM150.06 Stability of A Floating BodyDocument12 pagesExperiment Instructions: HM150.06 Stability of A Floating Bodys_nimalanNo ratings yet
- Centre of Gravity and Centroids: ConceptsDocument10 pagesCentre of Gravity and Centroids: ConceptsErikNo ratings yet
- CNC Programming - PdfdsfdsDocument27 pagesCNC Programming - PdfdsfdsArie JuliantoNo ratings yet
- Convocation Adv Sept 13Document1 pageConvocation Adv Sept 13mukesh3021No ratings yet
- Anleitung Ir1 eDocument16 pagesAnleitung Ir1 emukesh3021No ratings yet
- Laboratory Manual Physics - 1: AGH University of Science and Technology in Cracow Department of ElectronicsDocument3 pagesLaboratory Manual Physics - 1: AGH University of Science and Technology in Cracow Department of Electronicsmukesh3021No ratings yet
- Fluids Lab ManualDocument67 pagesFluids Lab Manualkalyan_aubeNo ratings yet
- Fluid Mechanics Hydraulics Lab ManualDocument24 pagesFluid Mechanics Hydraulics Lab Manualsawmag123No ratings yet
- Centrifugal Pump Test Rig: Fluid Mechanics and Hydraulics LabDocument6 pagesCentrifugal Pump Test Rig: Fluid Mechanics and Hydraulics Labmukesh3021No ratings yet
- Advanced Manufacturing ScienceDocument2 pagesAdvanced Manufacturing Sciencemukesh3021No ratings yet
- Advanced Manufacturing ProcessDocument2 pagesAdvanced Manufacturing Processmukesh3021No ratings yet
- Advanced Manufacturing ScienceDocument3 pagesAdvanced Manufacturing Sciencemukesh3021No ratings yet
- Adv - Design of Weldments Seme1 2004Document4 pagesAdv - Design of Weldments Seme1 2004mukesh3021No ratings yet
- Advanced ManufacturingDocument5 pagesAdvanced Manufacturingmukesh3021No ratings yet
- Advanced Manufacturing ProcessDocument2 pagesAdvanced Manufacturing Processmukesh3021No ratings yet
- Advanced Design of Weldments - Seme1 - 2006Document4 pagesAdvanced Design of Weldments - Seme1 - 2006mukesh3021No ratings yet
- Advanced Manufacturing ProcessDocument2 pagesAdvanced Manufacturing Processmukesh3021No ratings yet
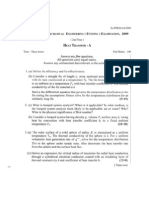
- B O M E (E) E, 2009: Ex/PM20A/4/2009Document2 pagesB O M E (E) E, 2009: Ex/PM20A/4/2009mukesh3021No ratings yet
- The Game: Penetrating the Secret Society of Pickup ArtistsFrom EverandThe Game: Penetrating the Secret Society of Pickup ArtistsRating: 4 out of 5 stars4/5 (131)
- Aruba, Bonaire & Curacao Adventure GuideFrom EverandAruba, Bonaire & Curacao Adventure GuideRating: 5 out of 5 stars5/5 (2)
- Secrets of the Millionaire Mind: Mastering the Inner Game of WealthFrom EverandSecrets of the Millionaire Mind: Mastering the Inner Game of WealthRating: 4.5 out of 5 stars4.5/5 (197)
- Proof of Heaven: A Neurosurgeon's Journey into the AfterlifeFrom EverandProof of Heaven: A Neurosurgeon's Journey into the AfterlifeRating: 3.5 out of 5 stars3.5/5 (165)
- Coastal Alaska & the Inside Passage Adventure Travel GuideFrom EverandCoastal Alaska & the Inside Passage Adventure Travel GuideNo ratings yet
- Geneva, Lausanne, Fribourg & Western Switzerland Travel AdventuresFrom EverandGeneva, Lausanne, Fribourg & Western Switzerland Travel AdventuresNo ratings yet
- Hollywood & the Best of Los Angeles Travel GuideFrom EverandHollywood & the Best of Los Angeles Travel GuideRating: 4.5 out of 5 stars4.5/5 (2)
- Jamaica: A Guide to the Food & RestaurantsFrom EverandJamaica: A Guide to the Food & RestaurantsRating: 4 out of 5 stars4/5 (1)