You might also like
- Guided Tour On VAR Innovation Response AnalysisDocument45 pagesGuided Tour On VAR Innovation Response AnalysisrunawayyyNo ratings yet
- Lect1 Measu HandoutDocument7 pagesLect1 Measu HandoutkeyyongparkNo ratings yet
- Lab 1: Model SelectionDocument6 pagesLab 1: Model SelectionthomasverbekeNo ratings yet
- QBUS2820 Mid-Semester 2015s2 (Solution)Document7 pagesQBUS2820 Mid-Semester 2015s2 (Solution)EricaNo ratings yet
- Ass5 DLM IntroDocument1 pageAss5 DLM IntroAssan AchibatNo ratings yet
- Variance Reduction Techniques 1Document48 pagesVariance Reduction Techniques 1Teng PengNo ratings yet
- Markov Processes, Lab 2Document6 pagesMarkov Processes, Lab 2Duc-Duy Pham NguyenNo ratings yet
- Web Appendix: Model EstimationDocument6 pagesWeb Appendix: Model Estimationlifeis1enjoyNo ratings yet
- Variance Reduction TechniquesDocument48 pagesVariance Reduction TechniquesjohnqNo ratings yet
- Stability Analysis of An Approximate Scheme For Moving Horizon EstimationDocument21 pagesStability Analysis of An Approximate Scheme For Moving Horizon EstimationhoangducquynhNo ratings yet
- Modele VaRDocument39 pagesModele VaRGabiNo ratings yet
- Part A: Working With MatricesDocument7 pagesPart A: Working With MatricesalibabawalaoaNo ratings yet
- Flatness and Motion Planning: The Car With: N TrailersDocument6 pagesFlatness and Motion Planning: The Car With: N TrailersgeneralgrievousNo ratings yet
- E301sample Questions2 - 12Document3 pagesE301sample Questions2 - 12Osman GulsevenNo ratings yet
- Discrete-Time Evaluation of The Time Response: AppendixDocument6 pagesDiscrete-Time Evaluation of The Time Response: AppendixAnonymous WkbmWCa8MNo ratings yet
- Imecc UnicampDocument14 pagesImecc UnicampShubha KandelNo ratings yet
- Schap 22Document16 pagesSchap 22Aljebre MohmedNo ratings yet
- MECH4310 Fall2015 Homework#4Document2 pagesMECH4310 Fall2015 Homework#4Anonymous emsONzXltnNo ratings yet
- Assign2 F15Document5 pagesAssign2 F15Lindsey HoffmanNo ratings yet
- MATLab Tutorial #5 PDFDocument7 pagesMATLab Tutorial #5 PDFsatyamgovilla007_747No ratings yet
- Library Development For Analytical Signal Simulation: S (T) U (T) +i V (T)Document10 pagesLibrary Development For Analytical Signal Simulation: S (T) U (T) +i V (T)Max RusanophNo ratings yet
- Control System PracticalDocument19 pagesControl System PracticalYashNo ratings yet
- Part IVDocument44 pagesPart IVfouzia1No ratings yet
- Forecasting ExperimentsDocument3 pagesForecasting Experimentsluying688No ratings yet
- Proceedings of The National Institute For Mathematical Sciences Vol. 2, No. 10 (2008), pp.000-000Document6 pagesProceedings of The National Institute For Mathematical Sciences Vol. 2, No. 10 (2008), pp.000-000Luca BallestraNo ratings yet
- Lab Tutorial 9: Regression Modelling: 9.1 Fitting Linear Models: Linear RegressionDocument4 pagesLab Tutorial 9: Regression Modelling: 9.1 Fitting Linear Models: Linear RegressionPragyan NandaNo ratings yet
- Monte Carlo BasicsDocument23 pagesMonte Carlo BasicsIon IvanNo ratings yet
- PHYS 102 Questions On Dimensional Analysis 2024 - 014114Document7 pagesPHYS 102 Questions On Dimensional Analysis 2024 - 014114mavrickgsniusNo ratings yet
- Yt X HT D: Lecture 9: Convolution Evaluation: Continuous Time SystemDocument5 pagesYt X HT D: Lecture 9: Convolution Evaluation: Continuous Time SystemRajat RameshNo ratings yet
- The Computation of The Expected Improvement in Dominated Hypervolume of Pareto Front ApproximationsDocument8 pagesThe Computation of The Expected Improvement in Dominated Hypervolume of Pareto Front ApproximationsWesternDigiNo ratings yet
- Micro-Chaos in Digital Control: Summary. in This Paper We Analyze A Model For The Effect of Digital Control On OneDocument34 pagesMicro-Chaos in Digital Control: Summary. in This Paper We Analyze A Model For The Effect of Digital Control On OneGeorge HallerNo ratings yet
- MCS Framework FEegsDocument10 pagesMCS Framework FEegsbarisari2No ratings yet
- Chapter 1 Intro PDFDocument35 pagesChapter 1 Intro PDFAriffuddin SaadNo ratings yet
- A Tutorial On Preview Control SystemsDocument6 pagesA Tutorial On Preview Control SystemsjaquetonaNo ratings yet
- HW3 SolDocument4 pagesHW3 SolharshNo ratings yet
- Control Systems Assignment-1Document6 pagesControl Systems Assignment-1catdogsunmoon12No ratings yet
- HW1Document11 pagesHW1Tao Liu YuNo ratings yet
- Vector Autoregressions: How To Choose The Order of A VARDocument8 pagesVector Autoregressions: How To Choose The Order of A VARv4nhuy3nNo ratings yet
- Dynamic Linear Models, Recursive Least Squares and Steepest-Descent LearningDocument11 pagesDynamic Linear Models, Recursive Least Squares and Steepest-Descent Learningstathiss11No ratings yet
- Individual HW - O1Document6 pagesIndividual HW - O1usman aliNo ratings yet
- Chapter 1 - Modelling, Computers and Error AnalysisDocument35 pagesChapter 1 - Modelling, Computers and Error AnalysisAzmiHafifiNo ratings yet
- ENGM541 Lab5 Runge Kutta SimulinkstatespaceDocument5 pagesENGM541 Lab5 Runge Kutta SimulinkstatespaceAbiodun GbengaNo ratings yet
- IMU Error Modeling TutorialDocument73 pagesIMU Error Modeling Tutorialmainking2003No ratings yet
- Signal Processing in MATLABDocument3 pagesSignal Processing in MATLABRadu VancaNo ratings yet
- SmoothingDocument9 pagesSmoothingmimiNo ratings yet
- Attachment 1Document5 pagesAttachment 1anthony.onyishi.242680No ratings yet
- PH110 LABMANUAL 2023 To 2024Document54 pagesPH110 LABMANUAL 2023 To 2024kumbutsomutaleNo ratings yet
- Using Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchDocument14 pagesUsing Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchFransiscus DheniNo ratings yet
- Control System PracticalDocument13 pagesControl System PracticalNITESH KumarNo ratings yet
- Using Ode45Document13 pagesUsing Ode45hmsedighi459No ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- Finalexam 330 630Document2 pagesFinalexam 330 630KRISHNA KOTI SAI PottupalliNo ratings yet
- Signal and Sys AssignmentDocument15 pagesSignal and Sys AssignmentWai Chun JonathanNo ratings yet
- 400 Bad Request 400 Bad Request Nginx/1.2.9Document5 pages400 Bad Request 400 Bad Request Nginx/1.2.9Shobeir TabasiNo ratings yet
- Linear Time Invariant Systems: (N), and IsDocument12 pagesLinear Time Invariant Systems: (N), and IsKashif AbbasNo ratings yet
- One Page of Notes, Front and Back. Closed Book. 50 MinutesDocument5 pagesOne Page of Notes, Front and Back. Closed Book. 50 MinutesVictoria MooreNo ratings yet
- ApplicationsDocument12 pagesApplicationskkkprotNo ratings yet
- Integer Optimization and its Computation in Emergency ManagementFrom EverandInteger Optimization and its Computation in Emergency ManagementNo ratings yet
- PTE Speaking Mock Test 1 PDFDocument49 pagesPTE Speaking Mock Test 1 PDFAbhishek PuriNo ratings yet
- PTE Writing Mock Test 2 PDFDocument10 pagesPTE Writing Mock Test 2 PDFAbhishek PuriNo ratings yet
- Speaking Describe Image: Telegram Link: Mobile App LinkDocument5 pagesSpeaking Describe Image: Telegram Link: Mobile App LinkyouvsyouNo ratings yet
- PTE Writing Mock Test 2 PDFDocument10 pagesPTE Writing Mock Test 2 PDFAbhishek PuriNo ratings yet
- PTE Writing Mock Test 1Document10 pagesPTE Writing Mock Test 1Abhishek PuriNo ratings yet
- PTE Speaking Mock Test 2 PDFDocument49 pagesPTE Speaking Mock Test 2 PDFAbhishek PuriNo ratings yet
- PTE Writing Mock Test 2Document24 pagesPTE Writing Mock Test 2Abhishek Puri100% (1)
- PTE Speaking Mock Test 2 PDFDocument49 pagesPTE Speaking Mock Test 2 PDFAbhishek PuriNo ratings yet
- Official Guide PTEA Teacher NotesDocument249 pagesOfficial Guide PTEA Teacher NotesIqbal singh95% (20)
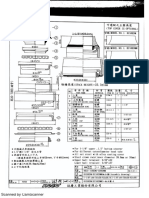
- 159EDM-159EDMM 組合圖Document1 page159EDM-159EDMM 組合圖Abhishek PuriNo ratings yet
- Retell TemplateDocument1 pageRetell TemplateAbhishek PuriNo ratings yet
- Beginners Guide To ImportingDocument3 pagesBeginners Guide To ImportingAbhishek PuriNo ratings yet
- Linkers 1Document3 pagesLinkers 1Antonio M. ScielzoNo ratings yet
- China "EPA" Crackdown Shuts Down Tens of Thousands of Factories With No End in SightDocument9 pagesChina "EPA" Crackdown Shuts Down Tens of Thousands of Factories With No End in SightAbhishek PuriNo ratings yet
- INCO Terms 2016 - Skyways Management Services LTDDocument9 pagesINCO Terms 2016 - Skyways Management Services LTDAbhishek PuriNo ratings yet
- Radio Frequency IdentificationDocument18 pagesRadio Frequency IdentificationAbhishek PuriNo ratings yet
- Production or Plant Engineer - 233513Document4 pagesProduction or Plant Engineer - 233513Loga NathanNo ratings yet
- Member RegistrationDocument2 pagesMember Registrationasknishan0% (1)
- 7 Eleven 140613174951 Phpapp02Document21 pages7 Eleven 140613174951 Phpapp02Abhishek PuriNo ratings yet
- Beginners Guide To ImportingDocument27 pagesBeginners Guide To ImportingFarhanNo ratings yet
- Beginners Guide To ImportingDocument3 pagesBeginners Guide To ImportingAbhishek PuriNo ratings yet
- Ontario Express Entry Guide 2018Document64 pagesOntario Express Entry Guide 2018Anil rajputNo ratings yet
- Production or Plant Engineer - 233513Document4 pagesProduction or Plant Engineer - 233513Loga NathanNo ratings yet
- 2013 Valuation OlympiadDocument4 pages2013 Valuation OlympiadAbhishek Puri0% (1)
- 2013 11 10 Repurchase Market TimingDocument37 pages2013 11 10 Repurchase Market TimingAbhishek PuriNo ratings yet
- Making Credit Safer: The Case For RegulationDocument5 pagesMaking Credit Safer: The Case For RegulationAbhishek PuriNo ratings yet
- Assessing Changes in The Monetary Transmission Mechanism: A VAR ApproachDocument15 pagesAssessing Changes in The Monetary Transmission Mechanism: A VAR ApproachAbhishek PuriNo ratings yet
- Moving With The Technology: Time and Cost Savings, IncludingDocument2 pagesMoving With The Technology: Time and Cost Savings, IncludingAbhishek PuriNo ratings yet
- A Study On Ti CkhyclesDocument25 pagesA Study On Ti CkhyclesAbhishek PuriNo ratings yet
- Logistic Regression (With R) : 1 TheoryDocument15 pagesLogistic Regression (With R) : 1 TheoryrattonxNo ratings yet