You might also like
- Introduction To Digital Control Systems - Lecture NotesDocument4 pagesIntroduction To Digital Control Systems - Lecture Notessridharparthipan100% (1)
- Engine Performance CurvesDocument2 pagesEngine Performance CurvesAlvaro Jose Peñata GiraldoNo ratings yet
- OAF Download Blob File Table ColumnDocument9 pagesOAF Download Blob File Table Columnnagarajuvcc123No ratings yet
- Catch3D ManualDocument48 pagesCatch3D ManualRodrigo ValeroNo ratings yet
- Matlab Aided Control System Design - ConventionalDocument36 pagesMatlab Aided Control System Design - ConventionalGaacksonNo ratings yet
- RoffelDocument16 pagesRoffelBerry101No ratings yet
- System IdentificationDocument6 pagesSystem Identificationjohn949No ratings yet
- Automatic Control 2 NotesDocument38 pagesAutomatic Control 2 NotesÇağın OkuyucuNo ratings yet
- 1.1 Systems and ModelsDocument5 pages1.1 Systems and ModelsPablo Novoa CastroNo ratings yet
- Neural Network 1&2Document72 pagesNeural Network 1&2paragNo ratings yet
- Fernandez Mounier Pachon 05Document16 pagesFernandez Mounier Pachon 05Ali AhmedNo ratings yet
- Model Predictive Control of Distillation Column Based Recursive Parameter Estimation Method Using HYSYS SimulationDocument4 pagesModel Predictive Control of Distillation Column Based Recursive Parameter Estimation Method Using HYSYS Simulationdicky julistianNo ratings yet
- System Identification - WikipediaDocument3 pagesSystem Identification - WikipediaRicardo VillalongaNo ratings yet
- Lecture 1 (11 - 06 - 20)Document5 pagesLecture 1 (11 - 06 - 20)SUNIT ANANDNo ratings yet
- Neural Networks Embed DDocument6 pagesNeural Networks Embed DL S Narasimharao PothanaNo ratings yet
- Combined Fuzzy-Logic Wavelet-Based Fault Classification Technique For Power System RelayingDocument8 pagesCombined Fuzzy-Logic Wavelet-Based Fault Classification Technique For Power System Relayingوليد موسىNo ratings yet
- Parameter Determination: Procedures For Modeling System TransientsDocument10 pagesParameter Determination: Procedures For Modeling System TransientsSubhadeep RoyNo ratings yet
- System Identification, Estimation and FilteringDocument34 pagesSystem Identification, Estimation and FilteringDao AnhNo ratings yet
- Comparison of Predictive Algorithms: Backpropagation, SVM, LSTM and Kalman Filter For Stock MarketDocument7 pagesComparison of Predictive Algorithms: Backpropagation, SVM, LSTM and Kalman Filter For Stock MarketPiyushPurohitNo ratings yet
- Multi-Layer PerceptronsDocument8 pagesMulti-Layer PerceptronswarrengauciNo ratings yet
- (Notes) DESIGN FOR TESTABILITYDocument34 pages(Notes) DESIGN FOR TESTABILITYsarathkumarNo ratings yet
- System Identifiction of Servo RigDocument29 pagesSystem Identifiction of Servo Rigkarthikkumar411No ratings yet
- Specification-Guided Controller Synthesis For Linear Systems and Safe Linear-Time Temporal LogicDocument10 pagesSpecification-Guided Controller Synthesis For Linear Systems and Safe Linear-Time Temporal LogicmatzeSCRIBDNo ratings yet
- Sensors: Fault Diagnosis From Raw Sensor Data Using Deep Neural Networks Considering Temporal CoherenceDocument17 pagesSensors: Fault Diagnosis From Raw Sensor Data Using Deep Neural Networks Considering Temporal Coherenceandrew1903No ratings yet
- Proceedings of The 1997 Winter Simulation Conference Ed. S. Andradóttir, K. J. Healy, D. H. Withers, and B. L. NelsonDocument7 pagesProceedings of The 1997 Winter Simulation Conference Ed. S. Andradóttir, K. J. Healy, D. H. Withers, and B. L. NelsonEric ReyesNo ratings yet
- Guidelines For ModellingDocument8 pagesGuidelines For ModellingEllango ArasarNo ratings yet
- Considerations About Establishing Mathematical Models Using System Identification ProceduresDocument4 pagesConsiderations About Establishing Mathematical Models Using System Identification ProceduresioncopaeNo ratings yet
- Selection of A ModelDocument5 pagesSelection of A ModelKartavya BhagatNo ratings yet
- Artificial Neural NetworkDocument37 pagesArtificial Neural NetworkashiammuNo ratings yet
- Experimental Modal Analysis 1Document12 pagesExperimental Modal Analysis 1tribleprinceNo ratings yet
- MATLAB Software For Recursive Identification and Scaling Using A Structured Nonlinear Black-Box ModelDocument41 pagesMATLAB Software For Recursive Identification and Scaling Using A Structured Nonlinear Black-Box ModelJHelfNo ratings yet
- Part 1 - Introduction To System IdentificationDocument40 pagesPart 1 - Introduction To System IdentificationFaridehNo ratings yet
- Quantitative TechniquesDocument9 pagesQuantitative Techniquessatishvarma142100% (1)
- Lecture 2Document13 pagesLecture 2unicode.coNo ratings yet
- System, Model & SimulationDocument13 pagesSystem, Model & SimulationA.B.M ANASNo ratings yet
- Use of AANN For Signal ValidationDocument11 pagesUse of AANN For Signal ValidationSohom DattaNo ratings yet
- Sigmetrics08 Control PDFDocument31 pagesSigmetrics08 Control PDFyalllikNo ratings yet
- Neural Observer Based Approach To FaultDocument6 pagesNeural Observer Based Approach To FaultHB RIMNo ratings yet
- Control System Lab 1Document17 pagesControl System Lab 1ekalrudy20No ratings yet
- Intrusion Detection On MANETSDocument22 pagesIntrusion Detection On MANETSJohnKevinStanleyNo ratings yet
- Annu Maria-Introduction To Modelling and SimulationDocument7 pagesAnnu Maria-Introduction To Modelling and SimulationMiguel Dominguez de García0% (1)
- Introduction To Modeling and SimulationDocument7 pagesIntroduction To Modeling and SimulationAbiodun Gbenga100% (2)
- 6 59 1 PBDocument8 pages6 59 1 PBSaifizi SaidonNo ratings yet
- Artificial Neural NetworksDocument23 pagesArtificial Neural NetworksAbhimanyuSriNo ratings yet
- An Introduction To Simulation ModelingDocument8 pagesAn Introduction To Simulation ModelingNaga BalajiNo ratings yet
- Artificial Intelligence: What Is AiDocument19 pagesArtificial Intelligence: What Is Aimadhur31No ratings yet
- Exploiting A Workstation Network For Automatic Generation of Test Patterns For Digital CircuitsDocument17 pagesExploiting A Workstation Network For Automatic Generation of Test Patterns For Digital CircuitsDhwal MehtaNo ratings yet
- The Power Transformer Differential Protection Using Decision TreeDocument13 pagesThe Power Transformer Differential Protection Using Decision Treehack fjNo ratings yet
- Symbolic Dynamic Analysis of Complex Systems For Anomaly DetectionDocument16 pagesSymbolic Dynamic Analysis of Complex Systems For Anomaly DetectionMarkoCar16No ratings yet
- Evaluation of (Unstable) Non-Causal Systems Applied To Iterative Learning ControlDocument10 pagesEvaluation of (Unstable) Non-Causal Systems Applied To Iterative Learning ControlSandeep RaiNo ratings yet
- 2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsDocument10 pages2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsMohamed Hechmi JERIDINo ratings yet
- The Gray-Box Approach To Sensor Data Analysis: TMO Progress Report 42-144 February 15, 2001Document11 pagesThe Gray-Box Approach To Sensor Data Analysis: TMO Progress Report 42-144 February 15, 2001Neethu Elizabeth MichaelNo ratings yet
- Toma de Informacion Cualitativa para ProcesosDocument6 pagesToma de Informacion Cualitativa para Procesosvictorpalacio19No ratings yet
- System Identification Using Intelligent AlgorithmsDocument13 pagesSystem Identification Using Intelligent AlgorithmsAnonymous gJHAwzENo ratings yet
- A 1Document4 pagesA 1milos ajdacicNo ratings yet
- Good Morning: Simulation OF Scheduling AlgorithmDocument23 pagesGood Morning: Simulation OF Scheduling AlgorithmnannupriyaNo ratings yet
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- Icsintesa & Seminastika 2022Document8 pagesIcsintesa & Seminastika 2022yamanimaslanNo ratings yet
- Quotation For 800-1000 KG SunwardDocument7 pagesQuotation For 800-1000 KG SunwardFarzan PuneNo ratings yet
- Operating & Instruction Manual: DWA-2000A-pH Code No.: 413120001pHDocument15 pagesOperating & Instruction Manual: DWA-2000A-pH Code No.: 413120001pHTrần TuấnNo ratings yet
- Employee Satisfaction and Perception Towards InfowizDocument34 pagesEmployee Satisfaction and Perception Towards InfowizShubham kumarNo ratings yet
- FontargenDocument282 pagesFontargenMIHAINo ratings yet
- Addresses For Placement Brochure Dispatch 1Document93 pagesAddresses For Placement Brochure Dispatch 1Henil DudhiaNo ratings yet
- UL Low Voltage BuswayDocument56 pagesUL Low Voltage BuswaysicarionNo ratings yet
- Gujarat Technological University: The Wind Power Plant - Introduction, Wind Turbine ClassesDocument5 pagesGujarat Technological University: The Wind Power Plant - Introduction, Wind Turbine ClassesDarshit KotadiyaNo ratings yet
- Ee-262 Programming With C Language: Group AssignmentDocument5 pagesEe-262 Programming With C Language: Group AssignmentTalal ArifNo ratings yet
- CIA Part 1 Cheat Sheet Updated June 2017Document20 pagesCIA Part 1 Cheat Sheet Updated June 2017Syed Ibrahim67% (3)
- Cranes Manufacturers and Suppliers: Ismail & Company (Private) LimitedDocument9 pagesCranes Manufacturers and Suppliers: Ismail & Company (Private) Limitedzahid_497No ratings yet
- Conventional Pumping Unit Specification PDFDocument2 pagesConventional Pumping Unit Specification PDFFaza InsanNo ratings yet
- US Navy Course NAVEDTRA 14244 - Signalman 3 & 2Document416 pagesUS Navy Course NAVEDTRA 14244 - Signalman 3 & 2Georges100% (2)
- Alkes FarmasiDocument32 pagesAlkes Farmasitheresia sitompulNo ratings yet
- Opto Isolators Lesson 07-17-2012Document35 pagesOpto Isolators Lesson 07-17-2012whynot05No ratings yet
- 6RA70 Field ReversalDocument12 pages6RA70 Field ReversalKsmah MahNo ratings yet
- Aeonic OrbDocument1 pageAeonic OrbcrazycurlsNo ratings yet
- MorhpoRDServiceUserManual WindowDocument10 pagesMorhpoRDServiceUserManual Windowakumarao100% (1)
- Lockbox SystemDocument7 pagesLockbox SystemnivethaNo ratings yet
- Report Builder SQL Server 2016Document142 pagesReport Builder SQL Server 2016Tximis KurdiNo ratings yet
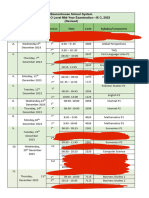
- Grade IX Mid Term Examination Datesheet 2023 RevisedDocument2 pagesGrade IX Mid Term Examination Datesheet 2023 Revisedraamir2010No ratings yet
- Nice 3000 New VersionDocument115 pagesNice 3000 New VersionSyed iliyas67% (3)
- TM 120 MaintenanceDocument24 pagesTM 120 Maintenanceahmedsaid85No ratings yet
- Tecumseh OHH50-65 ManualDocument40 pagesTecumseh OHH50-65 ManualJeffrey MullinsNo ratings yet
- شرح المحول الكهربيDocument88 pagesشرح المحول الكهربيAffify Afify100% (1)
- Analytics Cross Selling Retail BankingDocument11 pagesAnalytics Cross Selling Retail Bankingpraveen_bpgcNo ratings yet
- Renewable Energy Central America 2011Document231 pagesRenewable Energy Central America 2011Anne MarieNo ratings yet