You might also like
- Linear Control Technique For Anti-Lock BDocument5 pagesLinear Control Technique For Anti-Lock BBộ Môn DieuKhienhocNo ratings yet
- Abuki Anti Lock Braking SystemDocument20 pagesAbuki Anti Lock Braking SystemAbubaker MuzayinNo ratings yet
- Slip Ratio Control of Anti-Lock Braking System With Bang-Bang ControllerDocument8 pagesSlip Ratio Control of Anti-Lock Braking System With Bang-Bang Controllerniveditha trNo ratings yet
- C4-Brake ABS TrainingDocument8 pagesC4-Brake ABS TrainingcasvbNo ratings yet
- Bosch ESP Systems 5 Years of Experience 2000-01-1633Document11 pagesBosch ESP Systems 5 Years of Experience 2000-01-1633Syed GibranNo ratings yet
- Antilock Braking System (ABS) in Automobiles PDFDocument5 pagesAntilock Braking System (ABS) in Automobiles PDFInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Real-Time Systems in Automotive Applications: Vehicle Stability ControlDocument13 pagesReal-Time Systems in Automotive Applications: Vehicle Stability ControlSEP-PublisherNo ratings yet
- Chapter 8 IMP-Internal Model Principle and Repetitive ControlDocument17 pagesChapter 8 IMP-Internal Model Principle and Repetitive ControlFatihNo ratings yet
- Car Braking SystemsDocument23 pagesCar Braking SystemsStefan KostadinovićNo ratings yet
- Feedforward ControlDocument73 pagesFeedforward ControlsathyaNo ratings yet
- Advanced Chassis and Body Control Systems-Part2Document60 pagesAdvanced Chassis and Body Control Systems-Part2aliNo ratings yet
- Electronic Stability ControlDocument22 pagesElectronic Stability ControlShraddha Sangole50% (2)
- Power Electronics and Electric Drives for Traction ApplicationsFrom EverandPower Electronics and Electric Drives for Traction ApplicationsNo ratings yet
- Wiring Diagram: Volvo Xc90Document260 pagesWiring Diagram: Volvo Xc90Ernest WoreczekNo ratings yet
- HowStuffWorks - Benefits of Hill-Start ControlDocument3 pagesHowStuffWorks - Benefits of Hill-Start ControlfrapedNo ratings yet
- Chapter Motion and Control SystemDocument13 pagesChapter Motion and Control SystemRavinder SinghNo ratings yet
- Sensotronic Brake Control SBCDocument26 pagesSensotronic Brake Control SBCSyed Sharjil100% (1)
- ABS AlgorithmDocument6 pagesABS AlgorithmadugnaNo ratings yet
- មេរៀន ប្រព័ន្ធហ្វ្រាំង ABSDocument26 pagesមេរៀន ប្រព័ន្ធហ្វ្រាំង ABSYon ChhannakNo ratings yet
- Brake by Wiire PDFDocument8 pagesBrake by Wiire PDFWagner CondorNo ratings yet
- Fully Autonomous Vehicles: Visions of the future or still reality?From EverandFully Autonomous Vehicles: Visions of the future or still reality?No ratings yet
- Air Bag DeploymentDocument15 pagesAir Bag DeploymentDhananjaiNo ratings yet
- Electronic Stability ProgramDocument23 pagesElectronic Stability ProgramdwiudNo ratings yet
- K ManagerDocument57 pagesK ManagerFabio JuniorNo ratings yet
- Steer by WireDocument22 pagesSteer by Wirepravdiv100% (3)
- Antilock Braking System: Vehicle Dynamics (ME5670)Document26 pagesAntilock Braking System: Vehicle Dynamics (ME5670)sengottaiyanNo ratings yet
- Traction-Control-Oriented State Estimation For MotorcyclesDocument8 pagesTraction-Control-Oriented State Estimation For Motorcyclespremkumarreddy_n4922No ratings yet
- Sensotronic Brake ControlDocument27 pagesSensotronic Brake ControlBishal MaskeyNo ratings yet
- A New Cell-to-Cell Fast Balancing Circuit For Lithium-Ion Batteries in Electric Vehicles and Energy Storage SystemDocument5 pagesA New Cell-to-Cell Fast Balancing Circuit For Lithium-Ion Batteries in Electric Vehicles and Energy Storage SystemSanjana RoseNo ratings yet
- 13 P1 Traction and Stability Control InternetDocument56 pages13 P1 Traction and Stability Control InternetFarhan 'Fardrake' FaturahmanNo ratings yet
- Brake 12 Traction Control System (TRAC) PDFDocument35 pagesBrake 12 Traction Control System (TRAC) PDFazizshalihinNo ratings yet
- L5 Show FeedforwardDocument35 pagesL5 Show FeedforwardJulián RodríguezNo ratings yet
- 10 Automatic Transaxle SystemDocument35 pages10 Automatic Transaxle SystemYun ZhenNo ratings yet
- 874 Engine Control Systems II Technician Handbook: Single Pump Secondary Air Injection SystemDocument9 pages874 Engine Control Systems II Technician Handbook: Single Pump Secondary Air Injection SystemPhan Tien VuongNo ratings yet
- Theory: CAN-Bus: 1 General InformationDocument7 pagesTheory: CAN-Bus: 1 General InformationDileep Kumar100% (1)
- CAN Bus Bosch (Controller Area Network) Protocol Standard (Version 2 0) MotorolaDocument276 pagesCAN Bus Bosch (Controller Area Network) Protocol Standard (Version 2 0) MotorolalmdtasaNo ratings yet
- Unit 2-AEEDocument128 pagesUnit 2-AEEChidananda BasavannaNo ratings yet
- Modern Brake SystemDocument24 pagesModern Brake Systemfadhilah91No ratings yet
- SensorDocument25 pagesSensorlyndorNo ratings yet
- Electronic Power Steering SystemDocument69 pagesElectronic Power Steering SystemJason MaldonadoNo ratings yet
- Electronic Stability Control SystemDocument17 pagesElectronic Stability Control SystemTushar Kadu100% (1)
- Electronic Stability ControlDocument7 pagesElectronic Stability Controlt2erns100% (1)
- DSG Clutch Removal Tool Set Eng PrinterDocument16 pagesDSG Clutch Removal Tool Set Eng PrinterDawid SierockiNo ratings yet
- Ditexscopebasics PDFDocument17 pagesDitexscopebasics PDFMaurihuaanaa Navarro Santana100% (1)
- Introduction To Embedded Systems: 1.1 What Is An Embedded System?Document12 pagesIntroduction To Embedded Systems: 1.1 What Is An Embedded System?Shaharukh NadafNo ratings yet
- Accelerator Pedal Sensor Component DescriptionDocument2 pagesAccelerator Pedal Sensor Component DescriptionMadhav DeshpandeNo ratings yet
- Multi-Motor DrivesDocument6 pagesMulti-Motor DrivessriabolfazlNo ratings yet
- Electronic Stability ControlDocument1 pageElectronic Stability ControlNathan ParsonsNo ratings yet
- 162 - A Review of Yaw Rate and Sideslip Controllers For Passenger VehiclesDocument20 pages162 - A Review of Yaw Rate and Sideslip Controllers For Passenger VehiclesdvnccbmacbtNo ratings yet
- Mild Hybrid Electric Vehicle (MHEV) - ArchitecturesDocument9 pagesMild Hybrid Electric Vehicle (MHEV) - ArchitecturesRui MendesNo ratings yet
- SSP 26 Octavia Vehicle SafetyDocument45 pagesSSP 26 Octavia Vehicle SafetycoronaNo ratings yet
- Tyre Changer 24 - U-201 - LincosDocument2 pagesTyre Changer 24 - U-201 - LincosАлександар ТрајчевскиNo ratings yet
- Mild Hybrid Electric Vehicle (MHEV) - Components (Continental)Document6 pagesMild Hybrid Electric Vehicle (MHEV) - Components (Continental)Rui MendesNo ratings yet
- Antilock Braking SystemDocument8 pagesAntilock Braking SystemAltaf KhanNo ratings yet
- Mitsubushi's Torque Vectoring TechnologyDocument8 pagesMitsubushi's Torque Vectoring TechnologyVaisakh N NairNo ratings yet
- Sensotronic Brake ControlDocument22 pagesSensotronic Brake ControlMahesh Shrishail HulkundNo ratings yet
- Sony Service Manual KLV-40V410A-BrazilDocument88 pagesSony Service Manual KLV-40V410A-Brazilgimenes_r0% (1)
- Avc Lan and Avc Lan PlusDocument15 pagesAvc Lan and Avc Lan PlusMario Alberto Abarca Rodriguez100% (1)
- PMA - System Modelling and Simulation WM053-15 01JL PDFDocument5 pagesPMA - System Modelling and Simulation WM053-15 01JL PDFJoão FerroNo ratings yet
- Robben Ford - Playin'The BluesDocument65 pagesRobben Ford - Playin'The BluesJoão Ferro100% (1)
- RacecarDocument154 pagesRacecargio_flores_4100% (2)
- Sae J670 2008 PDFDocument73 pagesSae J670 2008 PDFJoão Ferro100% (3)
- Road Transport Sector and Air Pollution - Case of Lebanon 2016-011954Document46 pagesRoad Transport Sector and Air Pollution - Case of Lebanon 2016-011954نور الزهراءNo ratings yet
- TV On DVD-mst720-113Document3 pagesTV On DVD-mst720-113dann2220% (1)
- Summer2012 HOScale3-24Document22 pagesSummer2012 HOScale3-24Ronaldo SchroederNo ratings yet
- Burqui 2019Document38 pagesBurqui 2019ashielanieNo ratings yet
- The Royal Canadian Navy and The Cuban Missile CrisisDocument16 pagesThe Royal Canadian Navy and The Cuban Missile CrisisSean CampbellNo ratings yet
- Damen Stan Tug 1004: General Auxiliary EquipmentDocument2 pagesDamen Stan Tug 1004: General Auxiliary EquipmentMahmoud YosriNo ratings yet
- Mackenzie Bus TimetableDocument4 pagesMackenzie Bus TimetableSarah LauNo ratings yet
- Guidelines and Space Standards For Physically Disabled: Submitted byDocument32 pagesGuidelines and Space Standards For Physically Disabled: Submitted byrenuNo ratings yet
- Vw-Wi RL V.en-GB.K00589703.wi 47742071 PDFDocument2 pagesVw-Wi RL V.en-GB.K00589703.wi 47742071 PDFAndreas AndreouNo ratings yet
- LetterDocument9 pagesLetterMohit KumarNo ratings yet
- The Mystery of The Bermuda Triangle: by Tushar JindalDocument30 pagesThe Mystery of The Bermuda Triangle: by Tushar JindalTusharNo ratings yet
- Ticket: Terms & ConditionsDocument1 pageTicket: Terms & ConditionsJetesh DevgunNo ratings yet
- The Problems2Document2 pagesThe Problems2angelNo ratings yet
- D4.1 Hynds Manhole SystemDocument8 pagesD4.1 Hynds Manhole SystemSam LeungNo ratings yet
- Lesson 8-BridgesDocument2 pagesLesson 8-BridgesMohamed MraouiNo ratings yet
- Kezia Kinantya Atinirra Simson - 04211741000031 - Maersk Shipping LineDocument20 pagesKezia Kinantya Atinirra Simson - 04211741000031 - Maersk Shipping LineKezia SimsonNo ratings yet
- Airport Pavement Management (FAA)Document15 pagesAirport Pavement Management (FAA)Ayuwandira Febriana SaduNo ratings yet
- Cell Biology Handout - 1Document62 pagesCell Biology Handout - 1Dewi Lasimpara100% (1)
- Addis TesfayeDocument91 pagesAddis TesfayeNigusNo ratings yet
- Director of Procurement or Senior Manager - Procurement or DirecDocument4 pagesDirector of Procurement or Senior Manager - Procurement or Direcapi-121351903No ratings yet
- RPD Daily Incident Report 5/27/22Document8 pagesRPD Daily Incident Report 5/27/22inforumdocsNo ratings yet
- Word FileDocument26 pagesWord FileSeph InfanteNo ratings yet
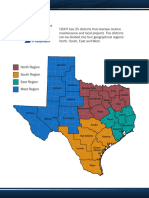
- Regions MapDocument1 pageRegions MapKarly ColmenarezNo ratings yet
- Bikf PDFDocument61 pagesBikf PDFTimotheus Abdullah Ingga PranataNo ratings yet
- Specialized Marine DiplomaDocument3 pagesSpecialized Marine DiplomaAnkur PatilNo ratings yet
- Hydra: A Star Wars Roleplaying Game AdventureDocument12 pagesHydra: A Star Wars Roleplaying Game Adventuregoober.khanNo ratings yet
- 12 Incoterms ExerciseDocument2 pages12 Incoterms ExerciseJ H100% (3)
- Biophysics-Lectures-2012-3 (Physiology) PDFDocument107 pagesBiophysics-Lectures-2012-3 (Physiology) PDFNedelcuGeorgeNo ratings yet
- Airport Taxi Company Marketing PlanDocument20 pagesAirport Taxi Company Marketing PlanPalo Alto Software100% (10)
- Tourism Organization Report - NDocument21 pagesTourism Organization Report - NAnnix Tamiao Adaya100% (1)