You might also like
- GRBL Losing StepsDocument26 pagesGRBL Losing StepsFranciscoNo ratings yet
- Step Motor Engineer (2002 Catlog)Document13 pagesStep Motor Engineer (2002 Catlog)engineer86No ratings yet
- Variable Reluctance MotorDocument14 pagesVariable Reluctance MotorgbksnNo ratings yet
- Stepper Motor: From Wikipedia, The Free EncyclopediaDocument42 pagesStepper Motor: From Wikipedia, The Free EncyclopediaJoeson RosarioNo ratings yet
- Stepper Motors: Stepper Motor vs. Servo MotorDocument13 pagesStepper Motors: Stepper Motor vs. Servo MotorGurwinder Singh100% (1)
- A Stepper MotorDocument10 pagesA Stepper MotorMohammed SiddiqueNo ratings yet
- Joystick Control of Stepper Motor Using ArduinoDocument7 pagesJoystick Control of Stepper Motor Using ArduinoDany Mathew100% (2)
- Stepper Motor AssignmentDocument12 pagesStepper Motor AssignmentShyamu29No ratings yet
- An Extensive Look On Servo and Stepper MotorDocument12 pagesAn Extensive Look On Servo and Stepper MotorsajhfhfsjaNo ratings yet
- Stepper MotorDocument25 pagesStepper Motorhemamanikumar100% (1)
- Stepper Motor DFLTDocument16 pagesStepper Motor DFLTvisdhoniNo ratings yet
- Switched Reluctance Reluctance Motors and ControlDocument47 pagesSwitched Reluctance Reluctance Motors and ControlSreerag Kunnathu Sugathan100% (1)
- Step MotDocument1 pageStep MotPropolis MeliaNo ratings yet
- Stepper Motor - Types, Advantages and ApplicationsDocument2 pagesStepper Motor - Types, Advantages and ApplicationsBilalNo ratings yet
- Stepper MotorDocument14 pagesStepper MotorJade Mark RamosNo ratings yet
- Stepper MotorDocument10 pagesStepper MotorboscoNo ratings yet
- Stepper MotorDocument11 pagesStepper MotorhaaenNo ratings yet
- What Is A Stepper MotorDocument12 pagesWhat Is A Stepper MotorteddiyfentawNo ratings yet
- Modeling of Hybrid Stepper Motor and Investigation of Resonance A SurveyDocument15 pagesModeling of Hybrid Stepper Motor and Investigation of Resonance A SurveyMeriam BadriNo ratings yet
- Stepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesDocument5 pagesStepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesMd Samee MNo ratings yet
- Differences Between Stepper Motors and Servo MotorsDocument1 pageDifferences Between Stepper Motors and Servo MotorsazharzebNo ratings yet
- Arbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorDocument12 pagesArbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorEphrem DanielNo ratings yet
- The Difference Between Induction Motor and Synchronous MotorDocument11 pagesThe Difference Between Induction Motor and Synchronous MotorZAW HTOONo ratings yet
- Stepper Motor ReportDocument19 pagesStepper Motor ReportIan Bagunas100% (2)
- Stepper MotorDocument13 pagesStepper Motorjit dharaNo ratings yet
- Stepper MotorsDocument17 pagesStepper MotorsJadeNo ratings yet
- Brushless DC Electric Motor: Fundamentals of OperationDocument12 pagesBrushless DC Electric Motor: Fundamentals of OperationRaffi SkNo ratings yet
- Stepper MotorsDocument53 pagesStepper MotorsirfancardiagnosticNo ratings yet
- Special Machines: Theory, Modeling, Control and ApplicationsDocument31 pagesSpecial Machines: Theory, Modeling, Control and ApplicationsRAJA MNo ratings yet
- Controlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACDocument17 pagesControlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACandita ranniNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorGanesh Pingle100% (1)
- R. Harish (08011A0209) B.Tech (4/4) Dept. of Electrical and Electronics Engineering, JNTUH College of Engineering HyderabadDocument17 pagesR. Harish (08011A0209) B.Tech (4/4) Dept. of Electrical and Electronics Engineering, JNTUH College of Engineering HyderabadNagi NagNo ratings yet
- A Stepper Motor Is A "Pulse-Driven" Motor That Changes The Angular Position of The Rotor in "Steps" It Is A Digital Electromechanical Device DefineDocument35 pagesA Stepper Motor Is A "Pulse-Driven" Motor That Changes The Angular Position of The Rotor in "Steps" It Is A Digital Electromechanical Device DefineSupriya RakshitNo ratings yet
- 1 - Switched Reluctance MotorDocument5 pages1 - Switched Reluctance MotorHARSHIT TOMARNo ratings yet
- Paso A Paso General de La Tecnología de AccionamientoDocument8 pagesPaso A Paso General de La Tecnología de AccionamientoVerónica RosasNo ratings yet
- 1 - Stepper MotorDocument3 pages1 - Stepper MotorHARSHIT TOMARNo ratings yet
- Slip Ring MotorsDocument2 pagesSlip Ring MotorsudhayNo ratings yet
- of BLDCDocument45 pagesof BLDCsmhbNo ratings yet
- Chapter-3 Switch Reluctance Motor Characteristics 3.1 Switched Reluctance MotorDocument9 pagesChapter-3 Switch Reluctance Motor Characteristics 3.1 Switched Reluctance MotorSree GaneshNo ratings yet
- Stepper MotorDocument15 pagesStepper MotorViral Thakkar100% (2)
- BLDCDocument45 pagesBLDCthulasi_krishna75% (4)
- Types of Stepper MotorDocument6 pagesTypes of Stepper MotorFazal Aziz WaliNo ratings yet
- Stepper MotorDocument16 pagesStepper Motorpartha DasNo ratings yet
- Pankaj Kumar 0811013116 Sec-ADocument16 pagesPankaj Kumar 0811013116 Sec-ASwagat PradhanNo ratings yet
- Reluctance MotorDocument27 pagesReluctance MotorMax Sedric L LaylayNo ratings yet
- Stepper MotorDocument7 pagesStepper MotorTaufique alahi PrantoNo ratings yet
- Instrumentation 2: Stepper MotorsDocument24 pagesInstrumentation 2: Stepper MotorsBabei Ionut-MihaiNo ratings yet
- Industrial Circuits Application NoteDocument3 pagesIndustrial Circuits Application Notequechild180No ratings yet
- DC Stepper Servo MotorsDocument2 pagesDC Stepper Servo MotorsidatscribdNo ratings yet
- Eceg-5401 2Document37 pagesEceg-5401 2Kide Bay0% (1)
- 080544R - Stepper Motor and DriversDocument8 pages080544R - Stepper Motor and DriversAnuruddha WijerathneNo ratings yet
- Steper Motors 8ADocument3 pagesSteper Motors 8AEnrique Dominguez MorenoNo ratings yet
- What Is ADocument10 pagesWhat Is AsahiiiiNo ratings yet
- Electrical Actuation SystemDocument8 pagesElectrical Actuation SystemShriyash KamatNo ratings yet
- Stepper Motors Basics Types, Uses, and Drive Schematic DiagramDocument15 pagesStepper Motors Basics Types, Uses, and Drive Schematic DiagramjackNo ratings yet
- An001 enDocument13 pagesAn001 enQuynh NguyenNo ratings yet
- Servo MotorDocument4 pagesServo MotorWasil BabarNo ratings yet
- VVVF Drive PresentationDocument19 pagesVVVF Drive PresentationKirti BedpuriyaNo ratings yet
- What Is A Stepper MotorDocument8 pagesWhat Is A Stepper MotorGnanasekarNo ratings yet
- PM Analysis On Stepper MotorDocument3 pagesPM Analysis On Stepper Motornaga_hsr1986No ratings yet
- PMD2PMANALYSISDocument32 pagesPMD2PMANALYSISnaga_hsr1986No ratings yet
- Presenter Name:: Duration of Presentation Presentation: 10 Min Q & A: 05 MinDocument34 pagesPresenter Name:: Duration of Presentation Presentation: 10 Min Q & A: 05 Minnaga_hsr1986No ratings yet
- Presenter Name:: Duration of Presentation Presentation: 10 Min Q & A: 05 MinDocument34 pagesPresenter Name:: Duration of Presentation Presentation: 10 Min Q & A: 05 Minnaga_hsr1986No ratings yet
- Numbering Machine DrawingsDocument23 pagesNumbering Machine Drawingsnaga_hsr1986100% (1)
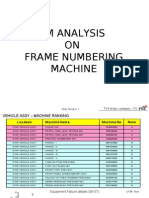
- PM Analysis ON Frame Numbering Machine: TVS Motor Company - P2Document33 pagesPM Analysis ON Frame Numbering Machine: TVS Motor Company - P2naga_hsr1986No ratings yet
- GenbastdslidesDocument6 pagesGenbastdslidesnaga_hsr1986No ratings yet