You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Logic Pro X 10.5 User Guide PDFDocument1,175 pagesLogic Pro X 10.5 User Guide PDFJeho MainNo ratings yet
- Verilog Interview QuestionsDocument41 pagesVerilog Interview QuestionsrAM100% (17)
- VMware SD WAN VeloCloud Customer PresentationDocument32 pagesVMware SD WAN VeloCloud Customer PresentationcamilojarabaNo ratings yet
- PING PoNG GAMEDocument34 pagesPING PoNG GAMEmesfin mathewos0% (1)
- Dual Boot Arch Linux On MacBook Pro InstallationDocument9 pagesDual Boot Arch Linux On MacBook Pro InstallationLeider montero lunaNo ratings yet
- BDDDocument21 pagesBDDVinit PatelNo ratings yet
- Position and Velocity Measurement by Optical Shaft EncodersDocument31 pagesPosition and Velocity Measurement by Optical Shaft EncodersVinit PatelNo ratings yet
- Selected Topics In Functional Verification Of Socs: Marks = 60. Fp Λ Gq 2) F (P 3) Pw (Qwr) 4) ¬Pu (Frvg¬QDocument2 pagesSelected Topics In Functional Verification Of Socs: Marks = 60. Fp Λ Gq 2) F (P 3) Pw (Qwr) 4) ¬Pu (Frvg¬QVinit PatelNo ratings yet
- VLSI Lecture02 OpenIDEA (정무경)Document69 pagesVLSI Lecture02 OpenIDEA (정무경)Vinit PatelNo ratings yet
- VIS 2005 LessonLearntDocument3 pagesVIS 2005 LessonLearntVinit PatelNo ratings yet
- 2013 Input Output Impedance 9Document20 pages2013 Input Output Impedance 9Vinit PatelNo ratings yet
- Channel CodingDocument107 pagesChannel CodingVinit PatelNo ratings yet
- Crosstalk AnalysisDocument26 pagesCrosstalk AnalysisVinit PatelNo ratings yet
- Chapter 3 PowerPointDocument9 pagesChapter 3 PowerPointMikel BoyraNo ratings yet
- Picture Geotag SurveyDocument3 pagesPicture Geotag Surveychamp77100% (1)
- Venue Comparison Chart From Offbeat BrideDocument2 pagesVenue Comparison Chart From Offbeat BrideStarss AreyouNo ratings yet
- Lab 4 - NAND and NOR ImplementationDocument4 pagesLab 4 - NAND and NOR ImplementationAngelicaNo ratings yet
- NRPL ADS-B Esite A4 2002114 2Document3 pagesNRPL ADS-B Esite A4 2002114 2Meem HasanNo ratings yet
- Security Consultant-1Document2 pagesSecurity Consultant-1HeriNo ratings yet
- BMS MaintenanceDocument4 pagesBMS MaintenanceLinda Soraya SeptianaNo ratings yet
- Ethical HackingDocument16 pagesEthical Hackingaquilerprinces0219No ratings yet
- System Planning: Bases For Planning in System AnalysisDocument15 pagesSystem Planning: Bases For Planning in System Analysisdivjot batraNo ratings yet
- Networking Exam Paper March 2012 - FinalDocument4 pagesNetworking Exam Paper March 2012 - FinalCedric CedricNo ratings yet
- Mobile Technology 1Document2 pagesMobile Technology 1kamalNo ratings yet
- Essentia Wifless ESS 2456x Basic System Manual - OpenWifless ESS ProNODE Ver 1.40.T1 - 20080505Document150 pagesEssentia Wifless ESS 2456x Basic System Manual - OpenWifless ESS ProNODE Ver 1.40.T1 - 20080505SonoIoNo ratings yet
- Sofiplus 2018: Non-Effective Parts-LineDocument2 pagesSofiplus 2018: Non-Effective Parts-Linenepoznati1111No ratings yet
- Growbot QueueDocument190 pagesGrowbot QueueAndika Liga BintangNo ratings yet
- Advance Excel Course Notes CompleteDocument58 pagesAdvance Excel Course Notes CompleteAbhishek Motiram JagtapNo ratings yet
- Ciber SecurityDocument24 pagesCiber SecurityRafaella KalilNo ratings yet
- Service Reference Guide: HP Compaq Business Desktop dc7100 Series 3rd EditionDocument290 pagesService Reference Guide: HP Compaq Business Desktop dc7100 Series 3rd EditionVladimir ShushkanovNo ratings yet
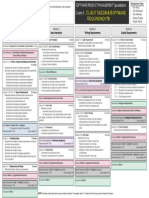
- Client Needs and Software Requirements - Course Map PDFDocument1 pageClient Needs and Software Requirements - Course Map PDFHahne MannNo ratings yet
- 100+ Free SEO Tools & ResourcesDocument5 pages100+ Free SEO Tools & Resourcesk.saikumarNo ratings yet
- NK260 Integrated CNC System Manufacturers' Manual-R12-1-desbloqueadoDocument163 pagesNK260 Integrated CNC System Manufacturers' Manual-R12-1-desbloqueadoMarcos HenriqueNo ratings yet
- 2022-10-27 08点的log 0Document3 pages2022-10-27 08点的log 0TUNA PEKTAŞNo ratings yet
- Aw GM320 PDFDocument10 pagesAw GM320 PDFhadiNo ratings yet
- Xcalibur High Chem Mass Frontier SoftwareDocument181 pagesXcalibur High Chem Mass Frontier SoftwareGC power100% (2)
- LogDocument266 pagesLogRenata FabbroniNo ratings yet
- Nkugwa Mark William Process Control Engineer CVDocument10 pagesNkugwa Mark William Process Control Engineer CVNkugwa Mark WilliamNo ratings yet
- How To Change Default Client in An SAP SystemDocument3 pagesHow To Change Default Client in An SAP SystemMohdFaizuddinNordinNo ratings yet