You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- API 650 Tank Design CalculationDocument8 pagesAPI 650 Tank Design Calculationmail_younes659283% (29)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Unit Operations and Processes in Environmental Engineering. Reynolds. 2nd Edition 1996. PWS PDFDocument814 pagesUnit Operations and Processes in Environmental Engineering. Reynolds. 2nd Edition 1996. PWS PDFSamir Cruzalegui Delgado67% (3)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- PTP5 Assembly GuideDocument8 pagesPTP5 Assembly Guidepippo2378793100% (1)
- Wastewater QuestionDocument18 pagesWastewater Questionth3mannnNo ratings yet
- Geyser Pumps For Aquaculture ApplicationsDocument10 pagesGeyser Pumps For Aquaculture Applicationsdrramsay0% (1)
- European Standard Norme Européenne Europäische NormDocument16 pagesEuropean Standard Norme Européenne Europäische NormAbey VettoorNo ratings yet
- BS en 12255-11 2001-Wastewater Treatment PlantsDocument15 pagesBS en 12255-11 2001-Wastewater Treatment PlantsAbey VettoorNo ratings yet
- HYBACS BrochureDocument6 pagesHYBACS BrochureprannoyNo ratings yet
- Piping and instrumentation diagram for 100KLD MBBR sewage treatment plantDocument1 pagePiping and instrumentation diagram for 100KLD MBBR sewage treatment plantRabindra SinghNo ratings yet
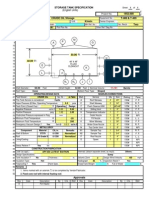
- Outermost Groove: 146.05 MM (IEC) Tracking Error: Mounting D Istance OverhangDocument1 pageOutermost Groove: 146.05 MM (IEC) Tracking Error: Mounting D Istance Overhangpippo2378793No ratings yet
- Ve Denon Da-307 Template en JPDocument2 pagesVe Denon Da-307 Template en JPpippo2378793No ratings yet
- P103 Vibration Damping of Fiber-Reinforced Polyurethane Using High and Negative Poisson'S Ratio LaminatesDocument15 pagesP103 Vibration Damping of Fiber-Reinforced Polyurethane Using High and Negative Poisson'S Ratio Laminatespippo2378793No ratings yet
- Align cartridge to grid with pivot, radii specsDocument1 pageAlign cartridge to grid with pivot, radii specspippo2378793No ratings yet
- Gas-Liquid Separators PDFDocument9 pagesGas-Liquid Separators PDFMubarik AliNo ratings yet
- SI Errata 03-13-08 PDFDocument24 pagesSI Errata 03-13-08 PDFMiguel Angel GonzalesNo ratings yet
- Gas Liquid Separators Bothamley JM CampbellDocument9 pagesGas Liquid Separators Bothamley JM CampbellLTORRESMNo ratings yet
- Composites Part B: Rafal Oliwa, Maciej Heneczkowski, Mariusz Oleksy, Henryk GalinaDocument8 pagesComposites Part B: Rafal Oliwa, Maciej Heneczkowski, Mariusz Oleksy, Henryk Galinapippo2378793No ratings yet
- Norsok ST 2001Document131 pagesNorsok ST 2001mamounsdNo ratings yet
- Sep - 2015 - Gas Liquid Separators Sizing Parameter MM083015 PDFDocument16 pagesSep - 2015 - Gas Liquid Separators Sizing Parameter MM083015 PDFvenkatesh801No ratings yet
- K 134 ContentDocument37 pagesK 134 ContentgbgbhagavanNo ratings yet
- API-521 Flare KOD Design and Even More - Part 1Document6 pagesAPI-521 Flare KOD Design and Even More - Part 1Said Ahmed Salem100% (1)
- Compressor Suction Drums PDFDocument6 pagesCompressor Suction Drums PDFrossifrancesco100% (1)
- Mist Elimination Liquid Liquid CoalescingDocument20 pagesMist Elimination Liquid Liquid Coalescingpippo2378793No ratings yet
- Gas Liquid Separation TechnologyDocument26 pagesGas Liquid Separation TechnologyCSNo ratings yet
- SI Errata 03-13-08 PDFDocument24 pagesSI Errata 03-13-08 PDFMiguel Angel GonzalesNo ratings yet
- Tri P10Document10 pagesTri P10Dvd Davide La CruzNo ratings yet
- Sodium Hydroxide Solution 30 - 54 CA enDocument11 pagesSodium Hydroxide Solution 30 - 54 CA enpippo2378793No ratings yet
- 1 2uaeuDocument27 pages1 2uaeupippo2378793No ratings yet
- StereoLife - Devialet Expert 140 ProDocument15 pagesStereoLife - Devialet Expert 140 Propippo2378793No ratings yet
- Hfe Vincent Music in Perfection 2015 enDocument24 pagesHfe Vincent Music in Perfection 2015 enpippo2378793No ratings yet
- D Demand Series InfosheetDocument4 pagesD Demand Series Infosheetpippo2378793No ratings yet
- Motor Power and TorqueDocument4 pagesMotor Power and Torquepippo2378793No ratings yet
- Bill Christie External Phono Preamp AXJul 2013Document5 pagesBill Christie External Phono Preamp AXJul 2013pippo2378793No ratings yet
- Pressure Temperature Ratings PDFDocument1 pagePressure Temperature Ratings PDFpippo2378793No ratings yet
- Aes DesignDocument97 pagesAes DesigndineshsirasatNo ratings yet
- Self On Audio Book ReviewDocument4 pagesSelf On Audio Book Reviewpippo2378793No ratings yet
- Hfe Vincent Hear The Sound 2012-13 enDocument43 pagesHfe Vincent Hear The Sound 2012-13 enpippo2378793No ratings yet
- Sewerage Planning and Wastewater Treatment For Sabang, Puerto GaleraDocument55 pagesSewerage Planning and Wastewater Treatment For Sabang, Puerto GaleraPEMSEA (Partnerships in Environmental Management for the Seas of East Asia)No ratings yet
- Reflections on Seven Decades of AS HistoryDocument13 pagesReflections on Seven Decades of AS HistoryiastraNo ratings yet
- SyllabicivilDocument96 pagesSyllabicivilShubham BansalNo ratings yet
- Wastewater Treatment Plant Operator Certification TrainingDocument69 pagesWastewater Treatment Plant Operator Certification Trainingkokushkin02No ratings yet
- Shivam Enviroquip GoaDocument7 pagesShivam Enviroquip GoasantoshNo ratings yet
- Dat IatDocument4 pagesDat Iatscribd birdNo ratings yet
- 1st Week LecturesDocument30 pages1st Week LecturesMohamed RamadanNo ratings yet
- Comparison On Efficiency of Various Techniques in Biological Treatment of Effluent Water - Final 2Document8 pagesComparison On Efficiency of Various Techniques in Biological Treatment of Effluent Water - Final 2desai sanketNo ratings yet
- Flow Sheets As Communication ToolsDocument9 pagesFlow Sheets As Communication ToolsAída MuñozNo ratings yet
- WWT 1Document33 pagesWWT 1Abhishek AdhikariNo ratings yet
- Dimensionnement D'ouvrages D'épurationDocument65 pagesDimensionnement D'ouvrages D'épurationOtman Saidi100% (1)
- FYP Waste Water TreatmentDocument53 pagesFYP Waste Water TreatmentAgha SufyanNo ratings yet
- Miranda Miracell NewDocument2 pagesMiranda Miracell NewPablo FaldutiNo ratings yet
- Evac MBR ManualDocument37 pagesEvac MBR ManualIvo Tadej Grmaj100% (1)
- Civ035 - Environmental EngineeringDocument6 pagesCiv035 - Environmental EngineeringSatyabhama Sanasam0% (1)
- Waste Water TreatmentDocument28 pagesWaste Water Treatmentsaurabhjoshi26108285% (40)
- Appendix 7 (1) .1. UNITANK Process &technical Proposal 13Document77 pagesAppendix 7 (1) .1. UNITANK Process &technical Proposal 13Huonghuynh Truongthi100% (1)
- MCQ Ee-2Document34 pagesMCQ Ee-2Sandy TrumpNo ratings yet
- Engineering College Sugar Industry Waste Water ReportDocument20 pagesEngineering College Sugar Industry Waste Water ReportAditi SharmaNo ratings yet
- Aims of Wastewater TreatmentDocument11 pagesAims of Wastewater TreatmentParth ShahNo ratings yet
- Complete Report PDFDocument93 pagesComplete Report PDFfurqan salabatNo ratings yet
- Aerobic Granular Sludge. Cultivation Parameters and Remoal MechanismsDocument53 pagesAerobic Granular Sludge. Cultivation Parameters and Remoal MechanismsBárbara VianaNo ratings yet
- Waste Water Treatment Reuse and Discharge 2006Document94 pagesWaste Water Treatment Reuse and Discharge 2006Cao Xuan CanhNo ratings yet