You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- How Elon Musk Learns Faster and Better Than Everyone ElseDocument9 pagesHow Elon Musk Learns Faster and Better Than Everyone ElseAdemola Ogunlalu100% (1)
- Spaceflight Revolution NASA Langley Research Center From Sputnik To ApolloDocument574 pagesSpaceflight Revolution NASA Langley Research Center From Sputnik To ApolloBob Andrepont100% (2)
- Ref Aircon1A ReviewerDocument105 pagesRef Aircon1A Reviewerperezismael70% (50)
- Differances Between S/4 Hana and EccDocument5 pagesDifferances Between S/4 Hana and Eccsivarani sadineni100% (1)
- Train Resistance CalculationsDocument6 pagesTrain Resistance Calculationssalkan_rahmanovic810No ratings yet
- Applying ISA-88 in Discrete and Continuous ManufacturingDocument27 pagesApplying ISA-88 in Discrete and Continuous ManufacturingMomentum Press100% (1)
- Prefabricated Construction SystemDocument13 pagesPrefabricated Construction SystemHimani GaurNo ratings yet
- Actisusp QurtevehicleDocument16 pagesActisusp Qurtevehicleapi-3798479No ratings yet
- 11 Optimal Design of A Composite Leaf Spring by GADocument9 pages11 Optimal Design of A Composite Leaf Spring by GAMandar PatunkarNo ratings yet
- 2dof RidecomfortDocument9 pages2dof Ridecomfortapi-3798479No ratings yet
- Modelagem Full CarDocument21 pagesModelagem Full CarRodrigo MaiaNo ratings yet
- General Electric 12C107 Sams 125 7Document21 pagesGeneral Electric 12C107 Sams 125 7daviNo ratings yet
- Hard-Drawn Copper-Clad Steel Wire: Standard Specification ForDocument4 pagesHard-Drawn Copper-Clad Steel Wire: Standard Specification Formanuel floresNo ratings yet
- Chapter 6 Duct Systems California Mechanical Code - Matrix Adoption Table Chapter 6 - Duct Systems (Matrix Adoption Tables Are Non-Regulatory, Intended Only As An Aid To The Code User. SeeDocument16 pagesChapter 6 Duct Systems California Mechanical Code - Matrix Adoption Table Chapter 6 - Duct Systems (Matrix Adoption Tables Are Non-Regulatory, Intended Only As An Aid To The Code User. SeeAnonymous yniiLtiNo ratings yet
- Sop of RMGDocument5 pagesSop of RMGHamidNo ratings yet
- Basic Knowledge of Video Surveillance System v1.2Document42 pagesBasic Knowledge of Video Surveillance System v1.2Edwin Mora MejiaNo ratings yet
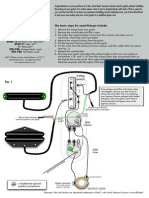
- Tele Wiring DiagramDocument2 pagesTele Wiring Diagrambartman666No ratings yet
- Vapour Absorption Chiller (VAM) - Working Principle in DetailDocument14 pagesVapour Absorption Chiller (VAM) - Working Principle in DetailSantosh BaladhyeNo ratings yet
- 3-1 DMM1 (Nov 2009 Regular)Document9 pages3-1 DMM1 (Nov 2009 Regular)micmechNo ratings yet
- Create A ChartDocument1 pageCreate A Chartapi-19505286No ratings yet
- TH Quick Start GuideDocument11 pagesTH Quick Start GuideostogradskiNo ratings yet
- Qureshi 1987Document32 pagesQureshi 1987Guillermo Soto AriasNo ratings yet
- MEE 1027 Transducers: Samar Singh Rathore 18BME1126Document19 pagesMEE 1027 Transducers: Samar Singh Rathore 18BME1126SAMAR SINGH RATHORE 18BME1126No ratings yet
- Maker Movement: Core Apprenticeship Library Apprenticeship Sector: Design & Invent Unit Guide: Maker MovementDocument12 pagesMaker Movement: Core Apprenticeship Library Apprenticeship Sector: Design & Invent Unit Guide: Maker Movementphatum2No ratings yet
- Model: USF-54: Universal Single Width BlowerDocument2 pagesModel: USF-54: Universal Single Width BlowerJoseph DavidNo ratings yet
- IBM Flex System X220Document370 pagesIBM Flex System X220Anushri ChansoriaNo ratings yet
- Selfa: Product CatalogueDocument63 pagesSelfa: Product CatalogueКонстантинКлёновNo ratings yet
- Diameter ME CYL No.8 TERNATE, 06-03-2021Document1 pageDiameter ME CYL No.8 TERNATE, 06-03-2021Budi cahyadiNo ratings yet
- Table of Heat ConservationDocument1 pageTable of Heat ConservationnincitoNo ratings yet
- CNC RamDocument29 pagesCNC RamAnand DubeyNo ratings yet
- Delivery Inspection Sheet: Checked Inspec-Tion NO Item Gambar KerjaDocument2 pagesDelivery Inspection Sheet: Checked Inspec-Tion NO Item Gambar KerjaMay FattahNo ratings yet
- Thermoplastics Pipes - ISO161Document10 pagesThermoplastics Pipes - ISO161anishsrNo ratings yet
- 79114Document36 pages79114Esraa AliNo ratings yet
- DMR Encryption Application Notes R1.2Document25 pagesDMR Encryption Application Notes R1.2fakemailutanetat100% (2)