Professional Documents
Culture Documents
Multipurpose Machines Using Scotch Yoke Mechanism
Multipurpose Machines Using Scotch Yoke Mechanism
Uploaded by
SendhilNathanOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Multipurpose Machines Using Scotch Yoke Mechanism
Multipurpose Machines Using Scotch Yoke Mechanism
Uploaded by
SendhilNathanCopyright:
Available Formats
Development of Multi Purpose Machine With Scotch Yoke Mechanism
CHAPTER-1
INTRODUCTION
Multi-operation machine as a research area is motivated by questions that arise in
industrial manufacturing, production planning, and computer control. Consider a large
automotive garage with specialized shops. A car may require the following work, replace
exhaust system, align wheels, and tune up. These three tasks may be carried out in any order.
However, since the exhaust system, alignment, and tune-up shops are in different buildings, it
is impossible to perform two tasks for a car simultaneously. When there are many cars
requiring services at the three shops, it is desirable to construct a service schedule that takes
the least amount of total time.
1.1 Scotch Yoke Mechanism
The Scotch yoke is a mechanism for converting the linear motion of a slider into
rotational motion or vice-versa. The piston or other reciprocating part is directly coupled to a
sliding yoke with a slot that engages a pin on the rotating part. The shape of the motion of the
piston is a pure sine wave over time given a constant rotational speed.
Figure 1.1 Sectional view of Scotch yoke mechanism
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Figure 1.2 Front view of Scotch Yoke Mechanism
1.2 Construction
The scotch yoke mechanism is constructed with iron bars. Here the crank is made
in some length and the yoke is also made using the same material. It is noted that the
minimum length of the yoke should be double the length of the crank. The crank and yoke is
connected with a pin. Iron bars are welded to both sides of the yoke to get the reciprocating
motion. The yoke with the iron bars is fixed on the display board with the help of c clamp.
Now the crank is welded to the end of the shaft of the motor. Now the pin on the crank is
connected to the yoke. The pin used to connect yoke and crank is a bolt.
1.3 Working principle
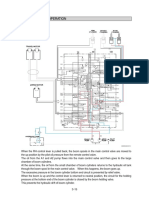
When the power is supplied to the 12v Dc motor, shaft and crank attached to the shaft start
rotating. As the crank rotates the pin slides inside the yoke and also moves the yoke forward. When
the crank rotates through in clockwise direction the yoke will get a displacement in the forward
direction. The maximum displacement will be equal to the length of the crank. When the crank
completes the next of rotation the yoke comes back to its initial position. For the next of rotation,
yoke moves in the backward direction. When the crank completes a full rotation the yoke moves back
to the initial position. For a complete rotation of crank the yoke moves through a length equal
to double the length of the crank. The displacement of the yoke can be controlled by varying
the length of the crank.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
CHAPTER-2
APPARATUS
2.1 Dc motors
At the most basic level, electric motors exist to convert electrical energy into
mechanical energy. This is done by way of two interacting magnetic fields - one stationary,
and another attached to a part that can move. A number of types of electric motors exist, but
most BEAM bots use DC motors 1 in some form or another. DC motors have the potential for
very high torque capabilities (although this is generally a function of the physical size of the
motor), are easy to miniaturize, and can be "throttled" via adjusting their supply voltage. DC
motors are also not only the simplest, but the oldest electric motors.
The basic principles of electromagnetic induction were discovered in the early 1800's
by Oersted, Gauss, and Faraday. By 1820, Hans Christian Oersted and Andre Marie Ampere
had discovered that an electric current produces a magnetic field. The next 15 years saw a
flurry of cross-Atlantic experimentation and innovation, leading finally to a simple DC rotary
motor. A number of men were involved in the work, so proper credit for the first DC motor is
really a function of just how broadly you choose to define the word "motor."
A DC motor is a mechanically commutated electric motor powered from direct
current (DC). The stator is stationary in space by definition and therefore so is its current. The
current in the rotor is switched by the commutator to also be stationary in space. This is how
the relative angle between the stator and rotor magnetic flux is maintained near 90 degrees,
which generates the maximum torque.
DC motors have a rotating armature winding but non-rotating armature magnetic field
and a static field winding or permanent magnet. Different connections of the field and
armature winding provide different inherent speed/torque regulation characteristics. The
speed of a DC motor can be controlled by changing the voltage applied to the armature or by
changing the field current. The introduction of variable resistance in the armature circuit or
field circuit allowed speed control. Modern DC motors are often controlled by power
electronics systems called DC drives.
The introduction of DC motors to run machinery eliminated the need for local steam
or internal combustion engines, and line shaft drive systems. DC motors can operate directly
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
from rechargeable batteries, providing the motive power for the first electric vehicles. Today
DC motors are still found in applications as small as toys and disk drives, or in large sizes to
operate steel rolling mills and paper machines.
2.2 Principles of Operation of DC Motor
In any electric motor, operation is based on simple electromagnetism. A currentcarrying conductor generates a magnetic field; when this is then placed in an external
magnetic field, it will experience a force proportional to the current in the conductor, and to
the strength of the external magnetic field. As you are well aware of from playing with
magnets as a kid, opposite (North and South) polarities attract, while like polarities (North
and North, South and South) repel. The internal configuration of a DC motor is designed to
harness the magnetic interaction between a current-carrying conductor and an external
magnetic field to generate rotational motion.
Let's start by looking at a simple 2-pole DC electric motor (here red represents a
magnet or winding with a "North" polarization, while green represents a magnet or winding
with a "South" polarization).
Figure 2.1 Sectional view of DC Motor
Every DC motor has six basic parts: axle, rotor (a.k.a., armature), stator, commutator,
field magnet(s), and brushes. In most common DC motors (and all that Beamers will see), the
external magnetic field is produced by high-strength permanent magnets. The stator is the
stationary part of the motor, this includes the motor casing, as well as two or more permanent
magnet pole pieces. The rotors (together with the axle and attached commutator) rotate with
respect to the stator. The rotor consists of windings (generally on a core), the windings being
electrically connected to the commutator. The above diagram shows a common motor layout
with the rotor inside the stator (field) magnets.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
The geometry of the brushes, commutator contacts, and rotor windings are such that
when power is applied, the polarities of the energized winding and the stator magnet(s) are
misaligned, and the rotor will rotate until it is almost aligned with the stator's field magnets.
As the rotor reaches alignment, the brushes move to the next commutator contacts, and
energize the next winding. Given our example two-pole motor, the rotation reverses the
direction of current through the rotor winding, leading to a "flip" of the rotor's magnetic field,
driving it to continue rotating.
The DC Motor or Direct Current Motor to give it its full title, is the most commonly
used actuator for producing continuous movement and whose speed of rotation can easily be
controlled, making them ideal for use in applications were speed control, servo type control,
and/or positioning is required. A DC motor consists of two parts, a "Stator" which is the
stationary part and a "Rotor" which is the rotating part. The result is that there are basically
three types of DC Motor available.
i.
Brushed Motor - This type of motor produces a magnetic field in a wound rotor (the
part that rotates) by passing an electrical current through a commutator and carbon
brush assembly, hence the term "Brushed". The stators (the stationary part) magnetic
field is produced by using either a wound stator field winding or by permanent
ii.
magnets. Generally brushed DC motors are cheap, small and easily controlled
.
Brushless Motor - This type of motor produce a magnetic field in the rotor by using
permanent magnets attached to it and commutation is achieved electronically. They
are generally smaller but more expensive than conventional brushed type DC motors
because they use "Hall effect" switches in the stator to produce the required stator
field rotational sequence but they have better torque/speed characteristics, are more
efficient and have a longer operating life than equivalent brushed types.
iii.
Servo Motor - This type of motor is basically a brushed DC motor with some form of
positional feedback control connected to the rotor shaft. They are connected to and
controlled by a PWM type controller and are mainly used in positional control
systems and radio controlled models.
Normal DC motors have almost linear characteristics with their speed of rotation being
determined by the applied DC voltage and their output torque being determined by the
current flowing through the motor windings. The speed of rotation of any DC motor can be
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
varied from a few revolutions per minute (rpm) to many thousands of revolutions per minute
making them suitable for electronic, automotive or robotic applications. By connecting them
to gearboxes or gear-trains their output speed can be decreased while at the same time
increasing the torque output of the motor at a high speed.
2.3 Brushed DC Motor
A conventional brushed DC Motor consist basically of two parts, the stationary body
of the motor called the Stator and the inner part which rotates producing the movement called
the Rotor or "Armature" for DC machines. The motors wound stator is an electromagnet
circuit which consists of electrical coils connected together in a circular configuration to
produce the required North-pole then a South-pole then a North-pole etc, type stationary
magnetic field system for rotation, unlike AC machines whose stator field continually rotates
with the applied frequency.
The current which flows within these field coils is known as the motor field current.
These electromagnetic coils which form the stator field can be electrically connected in
series, parallel or both together (compound) with the motors armature. A series wound DC
motor has its stator field windings connected in series with the armature. Likewise, a shunt
wound DC motor has its stator field windings connected in parallel with the armature as
shown.
2.3.1 Series and Shunt Connected DC Motor
Figure 2.2 Series and Shunt DC Motor
The rotor or armature of a DC machine consists of current carrying conductors
connected together at one end to electrically isolated copper segments called the commutator.
The commutator allows an electrical connection to be made via carbon brushes (hence the
name "Brushed" motor) to an external power supply as the armature rotates.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
The magnetic field setup by the rotor tries to align itself with the stationary stator field
causing the rotor to rotate on its axis, but cannot align itself due to commutation delays. The
rotational speed of the motor is dependent on the strength of the rotors magnetic field and the
more voltage that is applied to the motor the faster the rotor will rotate. By varying this
applied DC voltage the rotational speed of the motor can also be varied.
2.3.2 Conventional (Brushed) DC Motor
Figure 2.3 Conventional (Brushed) DC Motor
Permanent magnet (PMDC) brushed motors are generally much smaller and cheaper
than their equivalent wound stator type DC motor cousins as they have no field winding. In
permanent magnet DC (PMDC) motors these field coils are replaced with strong rare earth
(i.e. Samarium Cobalt, or Neodymium Iron Boron) type magnets which have very high
magnetic energy fields. This gives them a much better linear speed/torque characteristic than
the equivalent wound motors because of the permanent and sometimes very strong magnetic
field, making them more suitable for use in models, robotics and servos.
Although DC brushed motors are very efficient and cheap, problems associated with
the brushed DC motor is that sparking occurs under heavy load conditions between the two
surfaces of the commutator and carbon brushes resulting in self generating heat, short life
span and electrical noise due to sparking, which can damage any semiconductor switching
device such as a MOSFET or transistor. To overcome these disadvantages, Brushless DC
Motors were developed.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
2.4 Brushless DC Motor
The brushless DC motor (BDCM) is very similar to a permanent magnet DC motor,
but does not have any brushes to replace or wear out due to commutator sparking. Therefore,
little heat is generated in the rotor increasing the motors life. The design of the brushless
motor eliminates the need for brushes by using more complex drive circuits were the rotor
magnetic field is a permanent magnet which is always in synchronization with the stator field
allows for a more precise speed and torque control. Then the construction of a brushless DC
motor is very similar to the AC motor making it a true synchronous motor but one
disadvantage is that it is more expensive than an equivalent "brushed" motor design.
The control of the brushless DC motors is very different from the normal brushed DC
motor, in that it this type of motor incorporates some means to detect the rotors angular
position (or magnetic poles) required to produce the feedback signals required to control the
semiconductor switching devices. The most common position/pole sensor is the "Hall Effect
Sensor", but some motors also use optical sensors.
Using Hall Effect sensors, the polarity of the electromagnets is switched by the motor
control drive circuitry. Then the motor can be easily synchronized to a digital clock signal,
providing precise speed control. Brushless DC motors can be constructed to have, an external
permanent magnet rotor and an internal electromagnet stator or an internal permanent magnet
rotor and an external electromagnet stator. Advantages of the Brushless DC Motor compared
to its brushed cousin are higher efficiencies, high reliability, low electrical noise, good
speed control and more importantly, no brushes or commutator to wear out producing a much
higher speed. However their disadvantage is that they are more expensive and more
complicated to control.
2.5 DC Servo Motor
DC Servo motors are used in closed loop type applications were the position of the
output motor shaft is fed back to the motor control circuit. Typical positional "Feedback"
devices include Resolvers, Encoders and Potentiometers as used in radio control models such
as airplanes and boats etc. A servo motor generally includes a built-in gearbox for speed
reduction and is capable of delivering high torques directly. The output shaft of a servo motor
does not rotate freely as do the shafts of DC motors because of the gearbox and feedback
devices attached.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
2.6 DC Motor Behavior
At a simplistic level, using DC motors is pretty straight forward - you put power in,
and get rotary motion out. Life, of course, is never this simple - there are a number of
subtleties of DC motor behavior that should be accounted for in BEAMbot design.
2.6.1 High-speed output
This is the simplest trait to understand and treat most DC motors run at very high
output speeds (generally thousands or tens of thousands of RPM). While this is fine for some
BEAM bots (say, photo poppers or solar rollers), many BEAM bots (walkers, heads) require
lower speeds.
2.6.2 Back EMF
Just as putting voltage across a wire in a magnetic field can generate motion, moving
a wire through a magnetic field can generate voltage. This means that as a DC motor's rotor
spins, it generates voltage the output voltage is known as back EMF. Because of back EMF, a
spark is created at the commutator as a motor's brushes switch from contact to contact.
Meanwhile, back EMF can damage sensitive circuits when a motor is stopped suddenly.
2.6.3 Noise (ripple) on power lines
A number of things will cause a DC motor to put noise on its power lines:
commutation noise (a function of brush / commutator design & construction), roughness in
bearings (via back EMF), and gearing roughness (via back EMF, if the motor is part of a gear
motor) are three big contributors.
Even without these avoidable factors, any electric motor will put noise on its power
lines by virtue of the fact that its current draw is not constant throughout its motion. Going
back to our example two-pole motor, its current draw will be a function of the angle between
its rotor coil and field magnets:
Since most small DC motors have 3 coils, the coils' current curves will overlay each other,
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Added together, this ideal motor's current will then look something like this,
Reality is a bit more complex than this, as even a high-quality motor will display a
current transient at each commutation transition. Since each coil has inductance (by
definition) and some capacitance, there will be a surge of current as the commutator's brushes
first touch a coil's contact, and another as the brushes leave the contact (here, there's a slight
spark as the coil's magnetic field collapses).
As a good example, consider an oscilloscope trace of the current through a Mabuchi
FF-030PN motor supplied with 2 V (1ms per horizontal division, 0.05 mA per vertical
division)
Figure 2.4 Current Ripple
In this case, the peak-to-peak current ripple is approximately 0.29 mA, while the
average motor current is just under 31 mA. So under these conditions, the motor puts about
less than 1% of current ripple onto its power lines (and as you can see from the "clean" traces,
it outputs essentially no high-frequency current noise). Note that since this is a 3-pole motor,
and each coil is energized in both directions over the course of a rotor rotation, one revolution
of the rotor will correspond to six of the above curves (here, 6 x 2.4 ms = 0.0144 sec,
corresponding to a motor rotation rate of just fewer than 4200 RPM).
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Motor power ripple can wreak havoc in Nv nets by destabilizing them inadvertently.
Fortunately, this can be mitigated by putting a small capacitor across the motor's power lines
(you'll only be able to filter out "spikey" transients this way, though - you'll always see curves
like the ones above being imposed on your power). On the flip side of this coin, motor power
ripple can be put to good use - as was shown above, ripple frequency can be used to measure
motor speed, and its destabilizing tendencies can be used to reverse a motor without the need
for discrete "back-up" sensors
2.6.4 Characteristics of DC Motor
Voltage in steady state condition
Where:
V = input voltage
Eb = back EMF
Ia = Armature current
R = total resistance
The total resistance R is equal to Armature Resistance (Ra) + External resistance (Rph).
Figure 2.5 A: Shunt B: Series C: Compound and f = Field Coil
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
2.6.5 Shunt wound motor
A shunt wound motor has a high-resistance field winding connected in parallel with
the armature. It responds to increased load by trying to maintain its speed and this leads to an
increase in armature current. This makes it unsuitable for widely-varying loads, which may
lead to overheating.
2.6.6 Series wound motor
A series wound motor has a low-resistance field winding connected in series with the
armature. It responds to increased load by slowing down; the current increases and the torque
rises in proportional to the square of the current since the same current flows in both the
armature and the field windings. If the motor is stalled, the current is limited only by the total
resistance of the windings and the torque can be very high, but there is a danger of the
windings becoming overheated. Series wound motors were widely used as traction
motors in rail transport of every kind, but are being phased out in favor of AC induction
motors supplied through solid state inverters.
The counter-EMF aids the armature resistance to limit the current through the
armature. When power is first applied to a motor, the armature does not rotate. At that instant,
the counter-EMF is zero and the only factor limiting the armature current is the armature
resistance. Usually the armature resistance of a motor is less than 1 therefore the current
through the armature would be very large when the power is applied. Therefore the need
arises for an additional resistance in series with the armature to limit the current until the
motor rotation can build up the counter-EMF. As the motor rotation builds up, the resistance
is gradually cut out.
The output speed torque characteristic is the most notable characteristic of series
wound DC motors. The speed being almost entirely dependent on the torque required to drive
the load. This suits large inertial loads as the speed will drop until the motor slowly starts to
rotate & these motors have a very high stalling torque.
2.6.7 Permanent magnet motor
Permanent-magnet types have some performance advantages over direct-current,
excited, synchronous types, and have become predominant in fractional horsepower
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
applications. They are smaller, lighter, more efficient and reliable than other singly fed
electric machines.
Originally all large industrial DC motors used wound field or rotor magnets.
Permanent magnets have traditionally only been useful on small motors because it was
difficult to find a material capable of retaining a high-strength field. Only recently have
advances in materials technology allowed the creation of high-intensity permanent magnets,
such as neodymium magnets, allowing the development of compact, high-power motors
without the extra real-estate of field coils and excitation means. But as these high
performance permanent magnets become more applied in electric motor or generator systems,
other problems are realized.
2.6.8 Speed Control
Generally, the rotational speed of a DC motor is proportional to the EMF in its coil (=
the voltage applied to it minus voltage lost on its resistance), and the torque is proportional to
the current. Speed control can be achieved by variable battery tapings, variable supply
voltage, resistors or electronic controls. The direction of a wound field DC motor can be
changed by reversing either the field or armature connections but not both. This is commonly
done with a special set of contactors (direction contactors). The effective voltage can be
varied by inserting a series resistor or by an electronically controlled switching device made
of thrusters, transistors, or, formerly, mercury arc rectifiers.
In a circuit known as a chopper, the average voltage applied to the motor is varied by
switching the supply voltage very rapidly. As the "ON" to "OFF" ratio is varied to alter the
average applied voltage, the speed of the motor varies. The percentage "on" time multiplied
by the supply voltage gives the average voltage applied to the motor. Therefore, with a 100 V
supply and a 25% "on" time, the average voltage at the motor will be 25 V. During the "OFF"
time, the armature's inductance causes the current to continue through a diode called a "fly
back diode", in parallel with the motor. At this point in the cycle, the supply current will be
zero, and therefore the average motor current will always be higher than the supply current
unless the percentage "on" time is 100%. At 100% "on" time, the supply and motor current
are equal. The rapid switching wastes less energy than series resistors. This method is also
called pulse-width modulation (PWM) and is often controlled by a microprocessor. An
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
output filter is sometimes installed to smooth the average voltage applied to the motor and
reduce motor noise.
Since the series-wound DC motor develops its highest torque at low speed, it is often
used in traction applications such as electric locomotives, and trams. Another application is
starter motors for petrol and small diesel engines. Series motors must never be used in
applications where the drive can fail (such as belt drives). As the motor accelerates, the
armature (and hence field) current reduces. The reduction in field causes the motor to speed
up until it destroys itself. This can also be a problem with railway motors in the event of a
loss of adhesion since, unless quickly brought under control, the motors can reach speeds far
higher than they would do under normal circumstances. This can not only cause problems for
the motors themselves and the gears, but due to the differential speed between the rails and
the wheels it can also cause serious damage to the rails and wheel treads as they heat and cool
rapidly. Field weakening is used in some electronic controls to increase the top speed of an
electric vehicle.
The simplest form uses a contactor and field-weakening resistor; the electronic
control monitors the motor current and switches the field weakening resistor into circuit when
the motor current reduces below a preset value (this will be when the motor is at its full
design speed). Once the resistor is in circuit, the motor will increase speed above its normal
speed at its rated voltage. When motor current increases, the control will disconnect the
resistor and low speed torque is made available.
One interesting method of speed control of a DC motor is the Ward Leonard control.
It is a method of controlling a DC motor (usually a shunt or compound wound) and was
developed as a method of providing a speed-controlled motor from an AC supply, though it is
not without its advantages in DC schemes. The AC supply is used to drive an AC motor,
usually an induction motor that drives a DC generator or dynamo.
The DC output from the armature is directly connected to the armature of the DC
motor (sometimes but not always of identical construction). The shunt field windings of both
DC machines are independently excited through variable resistors. Extremely good speed
control from standstill to full speed, and consistent torque, can be obtained by varying the
generator and/or motor field current. This method of control was the de facto method from its
development until it was superseded by solid state thyristor systems. It found service in
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
almost any environment where good speed control was required, from passenger lifts through
to large mine pit head winding gear and even industrial process machinery and electric
cranes. Its principal disadvantage was that three machines were required to implement a
scheme (five in very large installations, as the DC machines were often duplicated and
controlled by a tandem variable resistor). In many applications, the motor-generator set was
often left permanently running, to avoid the delays that would otherwise be caused by starting
it up as required.
Although electronic (thyristor) controllers have replaced most small to medium WardLeonard systems, some very large ones (thousands of horsepower) remain in service. The
field currents are much lower than the armature currents, allowing a moderate sized thyristor
unit to control a much larger motor than it could control directly. For example, in one
installation, a 300 amp thyristor unit controls the field of the generator. The generator output
current is in excess of 15,000 amperes, which would be prohibitively expensive (and
inefficient) to control directly with thyristors.
2.6.9 Protection
To extend a D.C. motors service life, protective devices and motor controllers are
used to protect it from mechanical damage, excessive moisture, high dielectric stress and high
temperature or thermal overloading. These protective devices sense motor fault
conditions and either annunciate an alarm to notify the operator or automatically de-energize
the motor when a faulty condition occurs. For overloaded conditions, motors are protected
with thermal overload relays. Bi-metal thermal overload protectors are embedded in the
motor's windings and made from two dissimilar metals. They are designed such that
the bimetallic strips will bend in opposite directions when a temperature set point is reached
to open the control circuit and de-energize the motor.
Heaters are external thermal overload protectors connected in series with the motors
windings and mounted in the motor contactor. Solder pot heaters melt in an overload
condition, which cause the motor control circuit to de-energize the motor. Bimetallic heaters
function the same way as embedded bimetallic protectors. Fuses and circuit breakers are over
current or short circuit protectors. Ground fault relays also provide over current protection.
They monitor the electrical current between the motors windings and earth system ground.
In motor-generators, reverse current relays prevent the battery from discharging and
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
motorizing the generator. Since D.C. motor field loss can cause a hazardous runaway or over
speed condition, loss of field relays are connected in parallel with the motors field to sense
field current. When the field current decreases below a set point, the relay will deenergize the
motors armature. A locked rotor condition prevents a motor from accelerating after its
starting sequence has been initiated. Distance relays protect motors from locked-rotor faults.
Under voltage motor protection is typically incorporated into motor controllers or starters. In
addition,
motors
transformers, power
can
be
protected
conditioning
from overvoltages or
surges
equipment, MOVs, arrestors and
with
harmonic
solation
filters.
Environmental conditions, such as dust, explosive vapors, water, and high ambient
temperatures, can adversely affect the operation of a DC motor.
To protect a motor from these environmental conditions, the National Electrical
Manufacturers Association (NEMA) and the International Electro technical Commission
(IEC) have standardized motor enclosure designs based upon the environmental protection
they provide from contaminants.
2.7. DC Motor Starters
The counter-Emf aids the armature resistance to limit the current through the
armature. When power is first applied to a motor, the armature does not rotate. At that instant
the counter-Emf is zero and the only factor limiting the armature current is the armature
resistance and inductance. Usually the armature resistance of a motor is less than
1 therefore the current through the armature would be very large when the power is applied.
This current can make an excessive voltage drop affecting other equipment in the circuit and
even trip overload protective devices.
Therefore the need arises for an additional resistance in series with the armature to
limit the current until the motor rotation can build up the counter-emf. As the motor rotation
builds up, the resistance is gradually cut out.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
2.7.1 Manual-starting rheostat
Figure 2.6 Manual Starting Rheostats
When electrical and DC motor technology was first developed, much of the
equipment was constantly tended by an operator trained in the management of motor systems.
The very first motor management systems were almost completely manual, with an attendant
starting and stopping the motors, cleaning the equipment, repairing any mechanical failures,
and so forth.
The first DC motor-starters were also completely manual, as shown in this image.
Normally it took the operator about ten seconds to slowly advance the rheostat across the
contacts to gradually increase input power up to operating speed. There were two different
classes of these rheostats, one used for starting only, and one for starting and speed
regulation. The starting rheostat was less expensive, but had smaller resistance elements that
would burn out if required to run a motor at a constant reduced speed.
This starter includes a no-voltage magnetic holding feature, which causes the rheostat
to spring to the off position if power is lost, so that the motor does not later attempt to restart
in the full-voltage position. It also has over current protection that trips the lever to the off
position if excessive current over a set amount is detected.
2.7.2 Three-Point starter
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Figure 2.7 Three Point Starters
The incoming power is indicated as L1 and L2. The components within the broken lines
form the three-point starter. As the name implies there are only three connections to the
starter. The connections to the armature are indicated as A1 and A2. The ends of the field
(excitement) coil are indicated as F1 and F2. In order to control the speed, a field rheostat is
connected in series with the shunt field. One side of the line is connected to the arm of the
starter (represented by an arrow in the diagram). The arm is spring-loaded so, it will return to
the "Off" position when not held at any other position.
i.
On the first step of the arm, full line voltage is applied across the shunt field. Since the
field rheostat is normally set to minimum resistance, the speed of the motor will not be
excessive; additionally, the motor will develop a large starting torque.
ii.
The starter also connects an electromagnet in series with the shunt field. It will hold the
arm in position when the arm makes contact with the magnet.
iii.
Meanwhile that voltage is applied to the shunt field, and the starting resistance limits the
current to the armature.
iv.
As the motor picks up speed counter - EMF is built up; the arm is moved slowly to short.
2.7.3
Four-Point starter
The four-point starter eliminates the drawback of the three-point starter. In addition to the
same three points that were in use with the three-point starter, the other side of the line, L1, is
the fourth point brought to the starter when the arm is moved from the "Off" position. The
coil of the holding magnet is connected across the line. The holding magnet and starting
resistors function identical as in the three-point starter.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
The possibility of accidentally opening the field circuit is quite remote. The four-point
starter provides the no-voltage protection to the motor. If the power fails, the motor is
disconnected from the line.
2.7.4 Energy Losses in DC Motors
Losses occur when electrical energy is converted to mechanical energy (in the motor),
or mechanical energy is converted to electrical energy (in the generator). For the machine to
be efficient, these losses must be kept to a minimum. Some losses are electrical, others are
mechanical. Electrical losses are classified as copper losses and iron losses; mechanical
losses occur in overcoming the friction of various parts of the machine.
Copper losses occur when electrons are forced through the copper windings of the
armature and the field. These losses are proportional to the square of the current. They are
sometimes called I2R losses, since they are due to the power dissipated in the form of heat in
the resistance of the field and armature windings.
Iron losses are subdivided in hysteresis and eddy current losses. Hysteresis losses are
caused by the armature revolving in an alternating magnetic field. It, therefore, becomes
magnetized first in one direction and then in the other. The residual magnetism of the iron or
steel of which the armature is made causes these losses. Since the field magnets are always
magnetized in one direction (dc field), they have no hysteresis losses.
Eddy current losses occur because the iron core of the armature is a conductor
revolving in a magnetic field. This sets up an EMF. across portions of the core, causing
currents to flow within the core. These currents heat the core and, if they become excessive,
may damage the windings. As far as the output is concerned, the power consumed by eddy
currents is a loss. To reduce eddy currents to a minimum, a laminated core usually is used. A
laminated core is made of thin sheets of iron electrically insulated from each other. The
insulation between laminations reduces eddy currents, because it is "transverse" to the
direction in which these currents tend to flow. However, it has no effect on the magnetic
circuit. The thinner the laminations, the more effectively this method reduces eddy current
losses.
2.7.5 Advantages of DC Motor
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
i.
Speed control over a wide range both above and below the rated speed: The
attractive feature of the dc motor is that it offers the wide range of speed control both
above and below the rated speeds. This can be achieved in dc shunt motors by
methods such as armature control method and field control method. This is one of the
main applications in which dc motors are widely used in fine speed applications such
ii.
as in rolling mills and in paper mills.
High starting torque: dc series motors are termed as best suited drives for traction
applications used for driving heavy loads in starting conditions. DC series motors will
have a staring torque as high as 500% compared to normal operating torque.
Therefore dc series motors are used in the applications such as in electric trains and
iii.
cranes.
Accurate steep less speed with constant torque: Constant torque drives is one such
the drives will have motor shaft torque constant over a given speed range. In such
iv.
v.
drives shaft power varies with speed.
Quick starting, stopping, reversing and acceleration
Free from harmonics, reactive power consumption and many factors which make dc
motors more advantageous compared to an AC induction motors.
2.8 Drilling Machine
2.8.1Introduction
Drilling machine can be defined as an instrument which is used to drill holes. Drilling
machine plays an important role in mechanical workshops. The purpose of this project work
is to get hold of complete information pertaining to drilling machines. A drilling machine
comes in many shapes and sizes, from small hand-held power drills to bench mounted and
finally floor-mounted models. Today the Industrial growth is purely depends up on latest
machines; therefore the subject of drilling machines is extended too widely, because today
wide varieties of drilling machines are designed for various applications. The most advanced
version-drilling machine is CNC (Computer Numeric Control); it is used for drilling the
PCBs (Printed circuit boars). CNC Drilling is commonly implemented for mass production.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Simple drilling machines like hand held portable drilling machines, power feed
drilling machines, etc. are quite common; we can find these machines everywhere. Often
these machines are used for drilling a through hole over the job; these machines cannot be
used for number of machining operations for specific applications. Human force is required
to drill the hole, drilling depth cannot be estimated properly, job may spoil due to human
errors, and different size holes cannot be drilled without changing the drill bit. Consumes lot
of time for doing repeated multiple jobs, these all are the drawbacks. To overcome all these
problems, this automated drilling machine is designed which is aimed to drill the holes
automatically over a job according to the drilling depth data programmed through a key
board. The main concept of this machine is to drill the holes over particular jobs repeatedly at
different depths, sequence is maintained. As the machine contains drill motor, the movement
is controlled accurately.
2.8.2 Drill bit
Drill bits are cutting tools used to create cylindrical holes. Bits are held in a tool
called a drill, which rotates them and provides torque and axial force to create the hole.
Specialized bits are also available for non-cylindrical-shaped holes.
This article describes the types of drill bits in terms of the design of the cutter. The
other end of the drill bit, the shank, is described in the drill bit shank article. Drill bits come
in standard sizes, described in the drill bit sizes article. A comprehensive drill and tap size
chart lists metric and imperial sized drills alongside the required screw tap sizes. The term
drill can refer to a drilling machine, or can refer to a drill bit for use in a drilling machine. In
this article, for clarity, drill bit or bit is used throughout to refer to a bit for use in a drilling
machine, and drill refers always to a drilling machine.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Figure 2.8 Drill Bits
2.8.3 Twist drill
The twist drill bit is the type produced in largest quantity today. It drills holes in
metal, plastic, and wood. The twist drill bit was invented by Steven A. Morse of East
Bridgewater, Massachusetts in 1861. He received U.S. Patent 38,119 for his invention on
April 7, 1863. The original method of manufacture was to cut two grooves in opposite sides
of a round bar, then to twist the bar to produce the helical flutes. This gave the tool its name.
Nowadays, the drill bit is usually made by rotating the bar while moving it past a grinding
wheel to cut the flutes in the same manner as cutting helical gears. Tools recognizable as twist
drill bits are currently produced in diameters covering a range from 0.05 mm (0.002") to 100
mm (4"). Lengths up to about 1000 mm (39") are available for use in powered hand tools.
The geometry and sharpening of the cutting edges is crucial to the performance of the
bit. Users often throw away small bits that become blunt, and replace them with new bits,
because they are inexpensive and sharpening them well is difficult. For larger bits, special
grinding jigs are available. A special tool grinder is available for sharpening or reshaping
cutting surfaces on twist drills to optimize the drill for a particular material.
Manufacturers can produce special versions of the twist drill bit, varying the geometry
and the materials used, to suit particular machinery and particular materials to be cut. Twist
drill bits are available in the widest choice of tooling materials. However, even for industrial
users, most holes are still drilled with a conventional bit of high speed steel.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
The most common twist drill (the one sold in general hardware stores) has a point
angle of 118 degrees. This is a suitable angle for a wide array of tasks, and will not cause the
uninitiated operator undue stress by wandering or digging in. A more aggressive (sharper)
angle, such as 90 degrees, is suited for very soft plastics and other materials. The bit will
generally be self-starting and cut very quickly. A shallower angle, such as 150 degrees, is
suited for drilling steels and other tougher materials. This style bit requires a starter hole, but
will not bind or suffer premature wear when a proper feed rate is used.
Drills with no point angle are used in situations where a blind, flat-bottomed hole is
required. These drills are very sensitive to changes in lip angle, and even a slight change can
result in an inappropriately fast cutting drill bit that will suffer premature wear.The twist drill
does most of the cutting with the tip of the bit. There are flutes to carry the chips up from the
cutting edges to the top of the hole where they are cast off. Some of the parts of a drill bit are
diagramed below as viewed from the cutting tip of the drill,
Figure 2.9 Top view of Drill Bit
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Figure 2.10 Side View of Drill Bit
Typical parameters for drill bits are,
1. Material is High Speed Steel
2. Standard Point Angle is 118
Harder materials have higher point angles; soft materials have lower point angles. The
helix results in a positive cutting rake. Drill bits are typically ground (by hand) until they are
the desired shape. When done grinding, the lips should be the same length and at the same
angle, otherwise and oversized hole may be produced. Drill sizes are typically measured
across the drill points with a micrometer.
2.9 Hacksaw Blade
A hacksaw is a fine-tooth hand saw with a blade held under tension in a frame, used
for cutting materials such as metal or plastics. Hand-held hacksaws consist of a metal arch
with a handle, usually a pistol grip, with pins for attaching a narrow disposable blade. A
screw or other mechanism is used to put the thin blade under tension.
The blade can be mounted with the teeth facing toward or away from the handle,
resulting in cutting action on either the push or pull stroke. On the push stroke, the arch will
flex slightly, decreasing the tension on the blade, often resulting in an increased tendency of
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
the blade to buckle and crack. Cutting on the pull stroke increases the blade tension and will
result in greater control of the cut and longer blade life.
Figure 2.11 Banco Hacksaw
A hacksaw is a fine-tooth saw with a blade under tension in a frame, used for cutting
materials Such as metal. Hand-held hacksaws consist of a metal frame with a handle, and
pins for attaching a narrow disposable blade. A screw or other mechanism is used to put the
thin blade under tension. A power hacksaw (or electric hacksaw) is a type of hacksaw that is
powered by electric motor. Most power hacksaws are stationary machines but some portable
models do exist. Stationary models usually have a mechanism to lift up the saw blade on the
return stroke and some have a coolant pump to prevent the saw blade from overheating.
2.9.1 Market Potential
The demand of hacksaw blade is considerably increasing day by day with the growth
of Industrialization, engineering sector, real estate, and automobile sector etc. It is used in
almost every Sector for cutting of materials like angle, channel, flat plates, rods and such
other things. It is Also required in auto repairing shops, general repairing workshops, fitting
shops, welding shops And technical institutes. Govt. Department like Railway, Defence,
PWD, Postal & Telegraph and Others are one of the main users of it. In India large nos. of
small enterprises are engaged in its manufacturing. By considering its demand, new
production unit has great prospect.
2.9.2 Basis and Presumptions
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
The information supplied is based on a standard type of manufacturing activity
utilizing Conventional techniques of production and optimum level of performance.75% of
the envisaged capacity is taken as efficiency on single working shift of 8 hrs & 300 working
days in a year.
Labor and wages are required as per present circumstances.
The cost in respect of land & building, machine & equipment, raw material & selling
price of finished product etc are those generally obtained at the time of preparation of project
profile and may vary depending upon the location, make and for variety of reasons. The
interest on total capital has been assumed @ 14% p.a
2.9.3 Technical Aspects and Design
Blades are available in standardized lengths, and with anywhere from three to thirtytwo teeth/inch (tpi). The blade used is based on the thickness of the material being cut, with a
Minimum of three teeth in the material. Hacksaw blades are normally quite brittle, so care
needs to be taken to prevent brittle fracture of the blade. Bi-metal blades are meant to
minimize this risk.
2.9.4 Recommended Teeth per 25mm (tpi) for each material type
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
2.9.5 Blades
Blades are available in standardized lengths, usually 10 or 12 inches for a standard
hand hacksaw. "junior" hacksaws are half this size. Powered hacksaws may use large blades
in a range of sizes, or small machines may use the same hand blades.
The pitch of the teeth can be anywhere from fourteen to thirty-two teeth per inch (tpi)
for a hand blade, with as few as three tpi for a large power hacksaw blade. The blade chosen
is based on the thickness of the material being cut, with a minimum of three teeth in the
material. As hacksaw teeth are so small, they are set in a "wave" set. As for other saws they
are set from side to side to provide a kerfs or clearance when sawing, but the set of a hacksaw
changes gradually from tooth to tooth in a smooth curve, rather than alternate teeth set left
and right.
Hacksaw blades are normally quite brittle, so care needs to be taken to prevent brittle
fracture of the blade. Early blades were of carbon steel, now termed 'low alloy' blades, and
were relatively soft and flexible. They avoided breakage, but also wore out rapidly. Except
where cost is a particular concern, this type is now obsolete. 'Low alloy' blades are still the
only type available for the junior hacksaw, which limits the usefulness of this otherwise
popular saw.
For several decades now, hacksaw blades have used high speed steel for their teeth,
giving greatly improved cutting and tooth life. These blades were first available in the 'Allhard' form which cut accurately but were extremely brittle. This limited their practical use to
bench work on a work piece that was firmly clamped in a vice. A softer form of high speed
steel blade was also available, which wore well and resisted breakage, but was less stiff and
so less accurate for precise sawing. Since the 1980s, bi-metal blades have been used to give
the advantages of both forms, without risk of breakage. A strip of high speed steel along the
tooth edge is electron beam welded to a softer spine. As the price of these has dropped to be
comparable with the older blades, their use is now almost universal.
2.9.6 Hacksaw blade specifications
The most common blade is the 12 inch or 300 mm length. Hacksaw blades have two
holes near the ends for mounting them in the saw frame and the 12 inch / 300 mm dimension
refers to the center to center distance between these mounting holes.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
2.9.7 12 Inch Blade
Hole to Hole:
11 7/8 inches / 300 mm
Overall blade length:
12 3/8 inches / 315 mm (not tightly controlled)
Mounting Hole diameter:
9/64 to 5/32 inch / 3.5 to 4 mm (not tightly controlled)
Blade Width:
7/16 to 33/64 inch / 11 to 13 mm (not tightly controlled)
Blade Thickness:
0.020 to 0.027 inches / 0.5 to 0.70 mm
The kerf produced by the blades is somewhat wider than the blade thickness due to
the set of the teeth. It commonly varies between 0.030 and 0.063 inches / 0.75 and 1.6 mm
depending on the pitch and set of the teeth. The 10 inch blade is also fairly common and all
the above dimensions apply except for the following:
Hole to Hole:
9 7/8 inches / 250 mm
Overall blade length:
10 3/8 inches / 265 mm (not tightly controlled)
A panel hacksaw eliminates the frame, so that the saw can cut into panels of sheet
metal without the length of cut being restricted by the frame. Junior hacksaws are the small
variant, while larger mechanical hacksaws are used to cut working pieces from bulk metal.
A power hacksaw (or electric hacksaw) is a type of hacksaw that is powered either by
its own electric motor or connected to a stationary engine. Most power hacksaws are
stationary machines but some portable models do exist. Stationary models usually have a
mechanism to lift up the saw blade on the return stroke and some have a coolant pump to
prevent the saw blade from overheating.
While stationary electric hacksaws are reasonably uncommon they are still produced but saws
powered by stationary engines have gone out of fashion. The reason for using one is that they
provide a cleaner cut than an angle grinder or other types of saw. Large, power hacksaws are
sometimes used in place of a band saw for cutting metal stock to length.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
2.10 Shaping Machine
A shaper is a type of machine tool that uses linear relative motion between the work
piece and a single-point cutting tool to machine a linear tool path. Its cut is analogous to that
of a lathe, except that it is (archetypal) linear instead of helical. (Adding axes of motion can
yield helical tool paths, as also done in helical planning.) A shaper is analogous to a plane, but
smaller, and with the cutter riding a ram that moves above a stationary work piece, rather
than the entire work piece moving beneath the cutter. The ram is moved back and forth
typically by a crank inside the column; hydraulically actuated shapers also exist.
2.10.1 Types
Shapers are mainly classified as standard, draw-cut, horizontal, universal, vertical, geared,
crank, hydraulic, contour and traveling head. The horizontal arrangement is the most
common. Vertical shapers are generally fitted with a rotary table to enable curved surfaces to
be machined (same idea as in helical planning). The vertical shaper is essentially the same
thing as a slotter (slotting machine), although technically a distinction can be made if one
defines a true vertical shaper as a machine whose slide can be moved from the vertical. A
slotter is fixed in the vertical plane.
Small shapers have been successfully made to operate by hand power. As size
increases, the mass of the machine and its power requirements increase, and it becomes
necessary to use a motor or other supply of mechanical power. This motor drives a
mechanical arrangement (using a pinion gear, bull gear, and crank, or a chain over sprockets)
or a hydraulic motor that supplies the necessary movement via hydraulic cylinders.
2.10.2 Operation
A shaper operates by moving a hardened cutting tool backwards and forwards across
the work piece. On the return stroke of the ram the tool is lifted clear of the work piece,
reducing the cutting action to one direction only.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
The work piece mounts on a rigid, box-shaped table in front of the machine. The
height of the table can be adjusted to suit this work piece, and the table can traverse sideways
underneath the reciprocating tool, which is mounted on the ram. Table motion may be
controlled manually, but is usually advanced by automatic feed mechanism acting on the feed
screw. The ram slides back and forth above the work. At the front end of the ram is a vertical
tool slide that may be adjusted to either side of the vertical plane along the stroke axis. This
tool-slide holds the clapper box and tool post, from which the tool can be positioned to cut a
straight, flat surface on the top of the work piece. The tool-slide permits feeding the tool
downwards to deepen a cut. This adjustability, coupled with the use of specialized cutters and
tool holders, enable the operator to cut internal and external gear tooth profiles, splines,
dovetails, and keyways.
The ram is adjustable for stroke and, due to the geometry of the linkage, it moves
faster on the return (non-cutting) stroke than on the forward, cutting stroke. This action is via
a slotted link or Whitworth link
CHAPTER-3
FABRICATION
3.1 Frame Work
Figure 3.1 frame
Specifications:
Length:
68.5cm
Breadth:
18.5cm
Height:
71cm
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
3.2 Scotch Yoke Mechanism
Figure 3.2 Scotch Yoke Mechanism
Specifications:
Tube length:
85.5cm
Tube diameter:
2.5cm
Disc diameter:
14cm
Slider height:
13cm
Slider width:
5cm
Rectangular frame length: 68.5cm
Rectangular frame height: 36cm
3.3 Work Table
Figure 3.3 Circular work table
Specifications:
Table diameter:
Supporting link length:
Supporting link height:
7.5cm
18cm
13cm
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Figure 3.4 3D view of multipurpose machine
CHAPTER-4
4.1 Advantages
High torque output with a small cylinder size
Fewer moving parts
Smoother operation
Higher percentage of the time spent at top dead center (dwell) improving theoretical
engine
efficiency of constant volume combustion cycles though actual gains have
not been demonstrated.
In an engine application, elimination of joint typically served by a wrist pin, and near
elimination of piston skirt and cylinder scuffing, as side loading of piston due to sine
of connecting rod angle is eliminated.
4.2 Disadvantages
Rapid wear of the slot in the yoke caused by sliding friction and high contact
pressures.
Increased heat loss during combustion due to extended dwell at top dead
center offsets any constant volume combustion improvements in real engines.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Lesser percentage of the time spent at bottom dead center reducing blow down time
for two stroke engines, when compared with a conventional piston and crankshaft
mechanism.
4.3 Applications
This setup is most commonly used in control valve actuators in high pressure oil and
gas pipelines
It has been used in various internal combustion engines, such as the Bourke engine,
SyTech engine, and many hot air engines and steam engines.
It is also used in multipurpose machines and I.C engines.
CHAPTER-5
CONCLUSION
The scotch yoke mechanism is made and its advantages and disadvantages are
discussed. Its motion characteristics are studied. It is concluded that this mechanism is a good
choice to convert rotating motion into reciprocating motion because of fewer moving parts
and smoother operation. It can be used in direct injection engines like diesel engines, hot air
engines.
In this project report we provide an overview of the issues concerning different
aspects of multipurpose machine using scotch yoke mechanism .The project report focus on
the principle of scotch yoke mechanism, type of tooling and machining parameters and
process performance measure, which include cutting speed, depth of cut,material removal
rate with different type of equipments which can be run simultaneously and fabricate the
work piece In multipurpose machine has been presented . the presented results can help to
plan the machining of work piece with expected tolerance.
The following major conclusions may be drawn from the present project report.
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Multipurpose machine is derived from
turning lathe which has been a well
established industrial processes offering attractive capabilities for handling work piece
of various length to be used at micro level.
We have presented the development of multipurpose machine in various modes by
which it can be actively adopted.
We have explained the various parts and components of multipurpose machine using
scotch yoke mechanism.
Different types of attachments and tools which can be implemented on multipurpose
machine has been discussed
We have discussed the entire time line and working chart .
The vital need for the fabrication of a multipurpose machine is significant in the much
delay and time as well as energy wasted in using simple hand tools to carry out jobs.
Moreover, the cost of a lathe machine is too high for an average user. Also, multipurpose
machine will helps to reduce the cost and consequently increase the rate of production and
craftsmans skill.
The general purpose for any project is to find solutions on a certain problems. Its also
gives main idea how the project to be completed. For this project, the problems that need to
be solved are:1) Any manufacturer wants to reduce cost and time taken to complete a product but gives
better quality products and increases the outputs.
2) Manufacturer tends to upgrade their machines to compete with the new machine with
new technology.
3) Lathe machine cutting tool can easily break and needs to enhance its tool life.
The continuous quest to have the problems of man and his growing needs solved has led
to the establishment of factories and other industries, which necessitates an intermediate
technology. However, simple hand tools that were in use before are no longer efficient for
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
mass production. Then, there comes the need for urgent attention to better and useful
multipurpose machines.
REFERENCES
[1]
Mack. R., Mueller, R., Crotts, J., & Broderick, A. (2000). Perceptions, corrections and
[2]
defections: implications for Scotch yoke mechanism, 10(6), 339-346.
Mattila, A.S. (2001). The effectiveness of service recovery in a multi-industry setting.
[3]
The Journal of Services Marketing, 15(7), 596-583.
McDougall, G.H.G., & Levesque, T.J. (1999). Waiting for service: the effectiveness
[4]
of recovery strategies. International Journal of Contemporary mechanism 11(1), 6-15.
Michel, S. (2001). Analyzing service failures and recoveries a process approach.
[5]
International Journal of kinematic links, 12(1), 20-33.
Miller, J.L., Craighead, C.W., & Karwan, K.R. (2000). Service recovery: a framework
[6]
and empirical Investigation. Journal of links Management, 18(4), 387-400.
Six types of service scotch-Yoke mechanism and rack and pinion mechanism (Chase
[7]
and Stewart, 1994)
http://ezinearticles.com/?Using-Your- multipurpose machines Way & id=4352151
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Project pictures
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
Development of Multi Purpose Machine With Scotch Yoke Mechanism
Department of Mechanical Engineering, AMCEC, Bengaluru.
Page
You might also like
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Electrical Circuit & Circuit Analysis MCQ'SDocument27 pagesElectrical Circuit & Circuit Analysis MCQ'SGuruKPO83% (12)
- Module - Partially - Edited22 PDFDocument174 pagesModule - Partially - Edited22 PDFashe zinab80% (5)
- Astm d4630Document6 pagesAstm d4630ChristianNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Report Writing On LoopsDocument11 pagesReport Writing On LoopsNEET ncert reading100% (1)
- Robotic Trolley For Material HandlingDocument46 pagesRobotic Trolley For Material HandlingSaggy ChhataniNo ratings yet
- DC Motors and Stepper Motors Used As ActuatorsDocument13 pagesDC Motors and Stepper Motors Used As ActuatorsDươngVănTrọngNo ratings yet
- Group 2 Ac Motors Technical ReportDocument12 pagesGroup 2 Ac Motors Technical Reporttristan jeff bautistaNo ratings yet
- Scotch Yoke MechanismDocument37 pagesScotch Yoke MechanismSaravanan Viswakarma100% (1)
- Solar Grass Cutter With Linear Blades by Using Scotch Yoke MechanismDocument38 pagesSolar Grass Cutter With Linear Blades by Using Scotch Yoke MechanismAakash DindigulNo ratings yet
- Double Acting Hacksaw Machine Using Scotch Yoke MechanismDocument32 pagesDouble Acting Hacksaw Machine Using Scotch Yoke Mechanismbalaji67% (12)
- Motorized Four Wheel Nut RemovalDocument44 pagesMotorized Four Wheel Nut RemovalAmrrish S LNo ratings yet
- DC Motor - Wikipedia, The Free EncyclopediaDocument2 pagesDC Motor - Wikipedia, The Free Encyclopediadonodoni0008No ratings yet
- DC MotorDocument6 pagesDC Motordarshandarshana711No ratings yet
- Type of NC SystemDocument20 pagesType of NC Systemamit kumarNo ratings yet
- DC MotorDocument3 pagesDC MotorAhmad AzizudinNo ratings yet
- DC MotorsDocument12 pagesDC MotorsJamie Ray DalisayNo ratings yet
- Reaction PaperDocument6 pagesReaction PaperAngelo Escoro Dante100% (1)
- Muhammad Hamza 106report11Document13 pagesMuhammad Hamza 106report11Muhammad Hamza 18-NTU-0106No ratings yet
- Peres 10PPS103 2 Electrical Machines PDFDocument71 pagesPeres 10PPS103 2 Electrical Machines PDFThanigaivel RajaNo ratings yet
- Assignment Ac DCDocument10 pagesAssignment Ac DCKamil KhairiNo ratings yet
- Assignment 2 Ac DCDocument15 pagesAssignment 2 Ac DCVincoy JohnlloydNo ratings yet
- Assignment 2 Ac DCDocument15 pagesAssignment 2 Ac DCVincoy JohnlloydNo ratings yet
- Altena TorDocument8 pagesAltena TorJb EnarioNo ratings yet
- Construction of Simple Electric MotorDocument5 pagesConstruction of Simple Electric MotormohkristNo ratings yet
- Assignment # 6Document7 pagesAssignment # 6Jay Ey100% (1)
- Brushless DC Electric MotorDocument9 pagesBrushless DC Electric MotorichNo ratings yet
- What Is DC MotorDocument38 pagesWhat Is DC Motoralvin dalumpinesNo ratings yet
- Introduction To DC Electric MotorsDocument31 pagesIntroduction To DC Electric MotorsJames Adrian Abalde SaboNo ratings yet
- Mechatronics Ktu Module 6Document36 pagesMechatronics Ktu Module 6Adarsh s nairNo ratings yet
- 4 Motors: D.C. Motors Principles of D.C. MotorsDocument10 pages4 Motors: D.C. Motors Principles of D.C. MotorsmanjunathagNo ratings yet
- 3 ActuatorsonlineDocument73 pages3 ActuatorsonlineLloyd MontemayorNo ratings yet
- Direct Current MotorDocument5 pagesDirect Current Motorjamesbergano18No ratings yet
- What Is A DC MotorDocument9 pagesWhat Is A DC MotorKylaeunice GuerraNo ratings yet
- Ac Motor Les4Document4 pagesAc Motor Les4Mamadou CissokhoNo ratings yet
- Chapter 2 Prime MoversDocument90 pagesChapter 2 Prime Moversaimi wahabNo ratings yet
- Induction and Synchronous Motor FundamentalsDocument9 pagesInduction and Synchronous Motor FundamentalsfitxvNo ratings yet
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric CompanyRizwan HameedNo ratings yet
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric Companyafe2000must9083No ratings yet
- DC MotorDocument8 pagesDC Motorven_avv3382No ratings yet
- Electrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4Document250 pagesElectrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4sanjoni.jainNo ratings yet
- Tipos de MotoresDocument13 pagesTipos de MotoresJessica Sarahi Perez GonzalezNo ratings yet
- Disadvantages of Armature Resistence Control: What Is The Function of Commutator?Document4 pagesDisadvantages of Armature Resistence Control: What Is The Function of Commutator?SovanNo ratings yet
- Servo MechanismDocument24 pagesServo Mechanismmushahid980No ratings yet
- DC MotorDocument21 pagesDC MotorSameera MadhushankaNo ratings yet
- DC MotorsDocument12 pagesDC Motorsmuletola7No ratings yet
- Electric MotorsDocument16 pagesElectric MotorsReszler ArnoldNo ratings yet
- The Basic DC MotorDocument22 pagesThe Basic DC MotortamilselviNo ratings yet
- Speed Control of 3 Phase Ac Induction Motor Using Micro 2407Document58 pagesSpeed Control of 3 Phase Ac Induction Motor Using Micro 2407sundarspace100% (2)
- Motors For Mechatronics An IntroductionDocument80 pagesMotors For Mechatronics An IntroductionJigar M. UpadhyayNo ratings yet
- A Quick Overview On Rotatory Brush and Brushless DC MotorsDocument4 pagesA Quick Overview On Rotatory Brush and Brushless DC Motorsmazza234No ratings yet
- AC and DC MotorDocument13 pagesAC and DC MotorrikechNo ratings yet
- DC MotorDocument102 pagesDC MotorTestNo ratings yet
- Electrical Generators PDFDocument71 pagesElectrical Generators PDFchaithra hsNo ratings yet
- An Introduction To Brushless DC Motor ControlDocument33 pagesAn Introduction To Brushless DC Motor ControlIgor TrimcevskiNo ratings yet
- Disscussion of TheoryDocument5 pagesDisscussion of Theoryjamesbergano18No ratings yet
- 19P205 Electrical MachinesDocument34 pages19P205 Electrical Machinessumanthlogn007No ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- 3adw000175r0101 - ddc2000 - NT - Read FirstDocument32 pages3adw000175r0101 - ddc2000 - NT - Read FirstAhmed MoustafaNo ratings yet
- Phasor Measurement Units (Pmus) - Transforming PowerDocument33 pagesPhasor Measurement Units (Pmus) - Transforming PowerbanjaregNo ratings yet
- D2638Document3 pagesD2638rimi7alNo ratings yet
- Group 4 Single OperationDocument10 pagesGroup 4 Single OperationDeyvi Cconocuyca HuallparimachiNo ratings yet
- Waterfall Model FinalDocument23 pagesWaterfall Model FinalNeha SinghNo ratings yet
- Module 1 SiliconDocument4 pagesModule 1 SiliconTriveni M KNo ratings yet
- CV Formato Osvaldo Mercado 2019Document2 pagesCV Formato Osvaldo Mercado 2019Osvaldo MercadoNo ratings yet
- General Civil Construction Standard: QA/QC Templates ForDocument21 pagesGeneral Civil Construction Standard: QA/QC Templates Forshylaja mitunNo ratings yet
- Sample of Detailed Structural Analysis Computation of Beams MIDASDocument170 pagesSample of Detailed Structural Analysis Computation of Beams MIDASRj MendiolaNo ratings yet
- KBLDocument16 pagesKBLRamKS80100% (1)
- Concrete and Masonry SafetyDocument57 pagesConcrete and Masonry SafetyZabNo ratings yet
- HTTP WWW - Pcds.co - in PHP Interview Questions and AnswerDocument20 pagesHTTP WWW - Pcds.co - in PHP Interview Questions and AnswerSudhansu ChoudharyNo ratings yet
- 1458935715587Document8 pages1458935715587Rahimullah QaziNo ratings yet
- Chapter 5. Nondestructive Inspection (Ndi)Document7 pagesChapter 5. Nondestructive Inspection (Ndi)blackhawkNo ratings yet
- Certificate For Aadhaar UpdateDocument1 pageCertificate For Aadhaar UpdateAftab alamNo ratings yet
- Major Project Final, GroupDocument54 pagesMajor Project Final, Groupkannankannan0539No ratings yet
- Aix GLVMDocument36 pagesAix GLVMluweinetNo ratings yet
- 15210025.airlaid K70 95gsmDocument1 page15210025.airlaid K70 95gsmThanh NguyenNo ratings yet
- Classification of MotorSDocument17 pagesClassification of MotorSHumaid Shaikh50% (2)
- Radical PolymerizationDocument9 pagesRadical PolymerizationAtie Iekah100% (1)
- BOM MHP PanelDocument11 pagesBOM MHP PanelPritam SinghNo ratings yet
- The ECB-203 Is A Microprocessor-Based ProgrammableDocument6 pagesThe ECB-203 Is A Microprocessor-Based ProgrammableErdinc KlimaNo ratings yet
- Streamlight's ProTac 2.0 RMDocument3 pagesStreamlight's ProTac 2.0 RMTwobirds Flying PublicationsNo ratings yet
- Application Guide: Refrigerant Piping Manual For Small Split Cooling and Heat Pump SystemsDocument28 pagesApplication Guide: Refrigerant Piping Manual For Small Split Cooling and Heat Pump SystemsKevin Bryan Santos MendozaNo ratings yet
- Proposed Fabrication & Production Schedule For RFQ SSGEP 101-21 Supply of Pig Trap & Pig Signaller PDFDocument1 pageProposed Fabrication & Production Schedule For RFQ SSGEP 101-21 Supply of Pig Trap & Pig Signaller PDFDaniel DamboNo ratings yet
- Lec7 PDFDocument16 pagesLec7 PDFPadhma MNo ratings yet