You might also like
- Matrix Analysis (2nd) Solutions To ExercisesDocument81 pagesMatrix Analysis (2nd) Solutions To ExercisesAnonymous bZtJlFvPtp60% (10)
- MTH603 Final Term Solved MCQsDocument66 pagesMTH603 Final Term Solved MCQsMuhammad Asif Butt Mohsini73% (15)
- Solution of Skill Assesment Exercise of Control System Engineering by Norman S NiseDocument53 pagesSolution of Skill Assesment Exercise of Control System Engineering by Norman S NiseCarraan Dandeettirra Caala Altakkatakka71% (7)
- Modelado Rotary Pendulum Workbook InstructorDocument60 pagesModelado Rotary Pendulum Workbook Instructorsolid34No ratings yet
- StabilityDocument16 pagesStabilitythankamonyNo ratings yet
- ME375 Prelab 2Document7 pagesME375 Prelab 2Jason LeeNo ratings yet
- Control SystemsDocument32 pagesControl Systemsselvi0412100% (1)
- Control SystemsDocument72 pagesControl SystemsprasadNo ratings yet
- Reduction of Multiple SubsystemsDocument28 pagesReduction of Multiple SubsystemsDian Riana MustafaNo ratings yet
- Block DiagramDocument29 pagesBlock DiagramWawan Suhartawan100% (1)
- Block Diagram ReductionDocument14 pagesBlock Diagram ReductionJamal Mesidor100% (2)
- QUESTION BANK of Control Systems Engineering PDFDocument12 pagesQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNo ratings yet
- Programmable Logic Controller (PLC) : The Structure and Features of Programmable LogiccontrollerDocument6 pagesProgrammable Logic Controller (PLC) : The Structure and Features of Programmable LogiccontrollerSaad AliKhanNo ratings yet
- Chapter 2 - Discrete-State Control Part IDocument37 pagesChapter 2 - Discrete-State Control Part IVon JinNo ratings yet
- Programmable Logic Controller Name: Viloria, Maureen C. SR Code: J15-12667Document5 pagesProgrammable Logic Controller Name: Viloria, Maureen C. SR Code: J15-12667Danelle GeamalaNo ratings yet
- ECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. JacksonDocument4 pagesECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. Jacksonnida haqNo ratings yet
- Control Systems IMP QUESTIONSDocument8 pagesControl Systems IMP QUESTIONSHarika HarikaNo ratings yet
- PLCDocument46 pagesPLChazlanNo ratings yet
- PLC Stepper Motor Controller PDFDocument12 pagesPLC Stepper Motor Controller PDFVladimirNo ratings yet
- Motor Control: Case Study: MIT Handy BoardDocument6 pagesMotor Control: Case Study: MIT Handy BoardIsuru Pasan DasanayakeNo ratings yet
- Size of DOL Star Delta Starter Parts 10-6-13Document22 pagesSize of DOL Star Delta Starter Parts 10-6-13Dheeraj Yadav100% (1)
- PLC Reviewer PDFDocument6 pagesPLC Reviewer PDFDhafnylynn MacasaetNo ratings yet
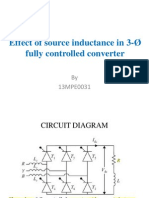
- Effect of Source Inductance in 3Ø Full WaveDocument12 pagesEffect of Source Inductance in 3Ø Full WaveUmashankar Subramaniam100% (1)
- PE Lecture 1Document31 pagesPE Lecture 1AhmedSeragNo ratings yet
- 04 Ladder LogicDocument17 pages04 Ladder LogicNimsiri AbhayasingheNo ratings yet
- Lect11 Design Via State SpaceDocument49 pagesLect11 Design Via State SpaceMirza Riyasat AliNo ratings yet
- Chapter Twelve: DC Chopper DrivesDocument24 pagesChapter Twelve: DC Chopper Drivesfor lifeNo ratings yet
- Process Control Lab ManualDocument30 pagesProcess Control Lab ManualAkash Sundar50% (2)
- C F I R: Hapter IVE Nternal ElaysDocument19 pagesC F I R: Hapter IVE Nternal ElaysMohamed OmarNo ratings yet
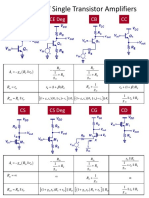
- Transistor Amplifier SummaryDocument1 pageTransistor Amplifier SummaryJhonNo ratings yet
- PLC Signal ConditioningDocument8 pagesPLC Signal ConditioningJyotiska De100% (1)
- Control Systems Presentation On Block Diagram AlgebraDocument6 pagesControl Systems Presentation On Block Diagram AlgebraSukanya SadhukhanNo ratings yet
- PLC 2Document31 pagesPLC 2Biniam HaddisNo ratings yet
- Asynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction MotorsDocument10 pagesAsynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction MotorsKushagra BhatiaNo ratings yet
- Basic Electronics - JFET - TutorialspointDocument6 pagesBasic Electronics - JFET - Tutorialspointgunasekaran k100% (1)
- Final Project - EEL 4657L - PLC Traffic IntersectionDocument8 pagesFinal Project - EEL 4657L - PLC Traffic Intersectionstmco123No ratings yet
- Module 3 Intro To ElectroPneumaticsDocument8 pagesModule 3 Intro To ElectroPneumaticsIvy Totanes TaborNo ratings yet
- Chapter 8: Programmable Logic Controller (PLC) : EG2098: Industrial Electronics and Control &topic 8 1 1Document26 pagesChapter 8: Programmable Logic Controller (PLC) : EG2098: Industrial Electronics and Control &topic 8 1 1Saad AliKhanNo ratings yet
- Question BankDocument19 pagesQuestion BankanbuelectricalNo ratings yet
- System Theory PDFDocument19 pagesSystem Theory PDFLakshmi Zahara0% (1)
- Op-Amp Basic Stages: Adama UniversityDocument18 pagesOp-Amp Basic Stages: Adama Universitygebretsadkan abrhaNo ratings yet
- Control QuestionsDocument6 pagesControl Questionshksaifee0% (1)
- Lab Manual - TheoryDocument49 pagesLab Manual - TheoryLovely VinayNo ratings yet
- Microcontroller and PLCDocument3 pagesMicrocontroller and PLCsivaeeinfo0% (1)
- Creative Technology PLCDocument12 pagesCreative Technology PLCattryr72No ratings yet
- Matlab and Simulink For Modeling and Control DC MotorDocument14 pagesMatlab and Simulink For Modeling and Control DC MotorGhaleb AlzubairiNo ratings yet
- Pic 18Document78 pagesPic 18anses1000No ratings yet
- PLCDocument36 pagesPLCsonhack96No ratings yet
- Siemens PLC: Chapter FiveDocument25 pagesSiemens PLC: Chapter FiveplcmanaNo ratings yet
- Time Response AnalysisDocument43 pagesTime Response AnalysisAkmal IsnaeniNo ratings yet
- Programmable Logic Controllers (PLC') : Helena Sullivan PLTW Cim-Cti 2015Document12 pagesProgrammable Logic Controllers (PLC') : Helena Sullivan PLTW Cim-Cti 2015Helena Sullivan100% (1)
- What Is Programmable Logic Controllers (PLCS) ?Document6 pagesWhat Is Programmable Logic Controllers (PLCS) ?Md Omar FaruqueNo ratings yet
- PLC & 8051Document22 pagesPLC & 8051Sunil Patel100% (1)
- Short Answer Type Questions: Unit Ii Voltage Source ConvertersDocument7 pagesShort Answer Type Questions: Unit Ii Voltage Source ConvertersBhanu Ganesh LukkaNo ratings yet
- Ac Servo Motor LabDocument23 pagesAc Servo Motor LabHardik SharmaNo ratings yet
- Principles of The LVDTDocument3 pagesPrinciples of The LVDTWalid FattahNo ratings yet
- 6 - Signal Flow GraphsDocument59 pages6 - Signal Flow GraphsSuyash Dahake VlogsNo ratings yet
- Mastering Siemens S7: A Comprehensive Guide to PLC ProgrammingFrom EverandMastering Siemens S7: A Comprehensive Guide to PLC ProgrammingNo ratings yet
- Electronics 3 Checkbook: The Checkbooks SeriesFrom EverandElectronics 3 Checkbook: The Checkbooks SeriesRating: 5 out of 5 stars5/5 (1)
- Zahra AbdulHameed ShukrDocument11 pagesZahra AbdulHameed ShukrTana AzeezNo ratings yet
- Study, Analysis and Evaluation of Block Diagram Reduction Name: University of Polytechnic/college ofDocument10 pagesStudy, Analysis and Evaluation of Block Diagram Reduction Name: University of Polytechnic/college ofTana AzeezNo ratings yet
- Lab # 8 Control SystemDocument10 pagesLab # 8 Control SystemZabeehullahmiakhailNo ratings yet
- Control Systems IDocument340 pagesControl Systems ICarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- FY Eng PDFDocument36 pagesFY Eng PDFCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- 1Document2 pages1Gaja RajSekarNo ratings yet
- Second Order Systems ProgrammingDocument1 pageSecond Order Systems ProgrammingCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Introduction To Industrial Automation: Electrical and Computer Engineering Department February 2017Document19 pagesIntroduction To Industrial Automation: Electrical and Computer Engineering Department February 2017Carraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Engg Maths - BookDocument133 pagesEngg Maths - BookEMON KONDAKERNo ratings yet
- RMT SoftwareDocument101 pagesRMT Softwarerohitjain482No ratings yet
- Mat RiceDocument37 pagesMat RiceADITYA SINGHNo ratings yet
- Edward Penney Matrix SystemsDocument13 pagesEdward Penney Matrix Systemsluigi.cumabigNo ratings yet
- Eigenvalues and EigenvectorsDocument19 pagesEigenvalues and EigenvectorsSung Woo Jang100% (1)
- A Matrix Is A Rectangular Array of Elements Arranged in Horizontal and Vertical ColumnsDocument83 pagesA Matrix Is A Rectangular Array of Elements Arranged in Horizontal and Vertical ColumnsvaibhavNo ratings yet
- Intro 2 Eigen StuffDocument129 pagesIntro 2 Eigen StuffZul KidNo ratings yet
- CH 6Document16 pagesCH 6tareqkh1No ratings yet
- GATE Engineering Mathematics MaterialDocument17 pagesGATE Engineering Mathematics Materialmanoj kaushikNo ratings yet
- Comp Chem8Document134 pagesComp Chem8Dr. Partha Sarathi SenguptaNo ratings yet
- Linear Algebra 2Document8 pagesLinear Algebra 2shrutiNo ratings yet
- Linalg17 PDFDocument12 pagesLinalg17 PDFKhalida NoureenNo ratings yet
- Time-Domain Solution of LTI State Equations 1 Introduction 2 ... - MITDocument32 pagesTime-Domain Solution of LTI State Equations 1 Introduction 2 ... - MITAbdul KutaNo ratings yet
- 20mhg01 MatrixDocument86 pages20mhg01 MatrixPradeepNo ratings yet
- Eigenvalue, Eigenvector and EigenspaceDocument18 pagesEigenvalue, Eigenvector and EigenspaceAbhijeet BokilNo ratings yet
- Routh-Hurwitz Criterion: Baojun Song, PH.DDocument53 pagesRouth-Hurwitz Criterion: Baojun Song, PH.DMudabbir MosviNo ratings yet
- Control System Theory and DesignDocument290 pagesControl System Theory and DesignPitzi PitzoneNo ratings yet
- Eigenvalues and Eigenvectors: An: Example. Consider The MatrixDocument23 pagesEigenvalues and Eigenvectors: An: Example. Consider The MatrixlsvikneshNo ratings yet
- Eigenvalues and EigenvectorsDocument29 pagesEigenvalues and EigenvectorsRakesh S K100% (1)
- C. Henry Edwards, David E. Penney - Elementary Differential Equations (6th Edition) (2008, Pearson Education) (Elsolucionario - Org) (541-600)Document60 pagesC. Henry Edwards, David E. Penney - Elementary Differential Equations (6th Edition) (2008, Pearson Education) (Elsolucionario - Org) (541-600)Noriel J ANo ratings yet
- MA1513 Chapter 3 Lecture NoteDocument26 pagesMA1513 Chapter 3 Lecture NoteJustin NgNo ratings yet
- N n-1 n-2 n-3 n-4: Dr. D. Saravanan, Professor of MathematicsDocument13 pagesN n-1 n-2 n-3 n-4: Dr. D. Saravanan, Professor of MathematicsSivabalanNo ratings yet
- 7.characterstics Equation, Eigen-Values, Eigen-VectorsDocument40 pages7.characterstics Equation, Eigen-Values, Eigen-VectorsParth DhimanNo ratings yet
- Linear Algebra Jordan Canonical Form-2Document26 pagesLinear Algebra Jordan Canonical Form-2Manoj BaishyaNo ratings yet
- Eigen ValuesDocument13 pagesEigen ValuesAnu6789No ratings yet
- Fuzzy Eigenvalues and Fuzzy Eigen Vectors For Fuzzy MatrixDocument6 pagesFuzzy Eigenvalues and Fuzzy Eigen Vectors For Fuzzy MatrixarcherselevatorsNo ratings yet
- Notes7 Linear AlgDocument41 pagesNotes7 Linear AlgFredrick MutungaNo ratings yet