You might also like
- Lifting Lug CalculationDocument2 pagesLifting Lug Calculationrustamriyadi100% (2)
- ModBusTCP Setup&Operation Manual (B-82844EN 01)Document55 pagesModBusTCP Setup&Operation Manual (B-82844EN 01)Juan Francisco Sanchez MassadiNo ratings yet
- FANUC SYSTEM R-J3iB Controller ArcTool Setup and Operations ManualDocument194 pagesFANUC SYSTEM R-J3iB Controller ArcTool Setup and Operations Manualtsmith350% (1)
- Cable Tray Price ListDocument54 pagesCable Tray Price ListSunil WadekarNo ratings yet
- Air Flow Principles: Duct DesignDocument49 pagesAir Flow Principles: Duct Designded endNo ratings yet
- S 420i Mechanical Unit Maintenance B 80505en 06 PDFDocument212 pagesS 420i Mechanical Unit Maintenance B 80505en 06 PDFAdam ZiobrowskiNo ratings yet
- R-30iA KAREL Operation Manual Reference (B-83144EN-1 01) PDFDocument510 pagesR-30iA KAREL Operation Manual Reference (B-83144EN-1 01) PDFfrederic190pNo ratings yet
- BookDocument47 pagesBookTensaigaNo ratings yet
- Asme B30.10-2019Document28 pagesAsme B30.10-2019Hermon Pakpahan50% (2)
- M-900iA600 Mechanical Unit Parts Manual (B-82176EN - 01) PDFDocument95 pagesM-900iA600 Mechanical Unit Parts Manual (B-82176EN - 01) PDFfrederic190pNo ratings yet
- FANUC Robotics SYSTEM R-J3 (RIA) A-Size, B-Size and Paint Controller Connection and Maintenance Manual Section IV PDFDocument103 pagesFANUC Robotics SYSTEM R-J3 (RIA) A-Size, B-Size and Paint Controller Connection and Maintenance Manual Section IV PDFMayank Patel100% (1)
- Tower Scaffolds: What You Need To DoDocument3 pagesTower Scaffolds: What You Need To DoMario Marasigan100% (1)
- Fanuc User Socket MessagingDocument1 pageFanuc User Socket MessagingTensaiga100% (1)
- B-82694EN - 03 R-30iB - DeviceNet - Operator - Manual PDFDocument108 pagesB-82694EN - 03 R-30iB - DeviceNet - Operator - Manual PDFCristian SmarandacheNo ratings yet
- Manual: Original InstructionsDocument118 pagesManual: Original InstructionsMelanie GerdesNo ratings yet
- R-30iB PMC Manual (B-83254EN 01)Document520 pagesR-30iB PMC Manual (B-83254EN 01)Sem FadeyNo ratings yet
- R-J2 Controller - Maintenance Manual B-80525E - 04 PDFDocument608 pagesR-J2 Controller - Maintenance Manual B-80525E - 04 PDFAdam ZiobrowskiNo ratings yet
- ACI 318M 2019 Beam Sway Shear CalculationDocument7 pagesACI 318M 2019 Beam Sway Shear CalculationMahmudul Alam kanakNo ratings yet
- Partes JLG 20AM, 25AM, 30AM, 36AM, 41AM PDFDocument186 pagesPartes JLG 20AM, 25AM, 30AM, 36AM, 41AM PDFivanNo ratings yet
- Ipendant Customization Manual Ver.7.70 (MAROC77CG01101E Rev.Document222 pagesIpendant Customization Manual Ver.7.70 (MAROC77CG01101E Rev.Manuel Gutierrez100% (1)
- Var PDFDocument812 pagesVar PDFRourkela Fabrications Pvt. Ltd.0% (1)
- R-J2 Controller Parts ManualDocument168 pagesR-J2 Controller Parts ManualMartijn van PaassenNo ratings yet
- R J3iB ControllerDocument280 pagesR J3iB ControllerSuha Norbert100% (1)
- Manual Am-120ic Operator Manual B-82874en 07Document178 pagesManual Am-120ic Operator Manual B-82874en 07JORGENo ratings yet
- HRP-2 Fanuc Robot M-20iD Mechanical Unit Operators ManualDocument132 pagesHRP-2 Fanuc Robot M-20iD Mechanical Unit Operators ManualYpatelNo ratings yet
- Mtto. Mecanico P-200 R-J2 PDFDocument324 pagesMtto. Mecanico P-200 R-J2 PDFJaime Flores CaballeroNo ratings yet
- Fanuc R-2000iA Series PDFDocument4 pagesFanuc R-2000iA Series PDFAntonio RodriguezNo ratings yet
- System Variable ListingDocument503 pagesSystem Variable Listingliqiang wangNo ratings yet
- M410 RJ3Document4 pagesM410 RJ3Ali Hernandez100% (1)
- EB03642 Paint Robot Cleaning and Covering RecommendationsDocument10 pagesEB03642 Paint Robot Cleaning and Covering Recommendationsgguadian21No ratings yet
- Fanuc PalletizingDocument2 pagesFanuc PalletizingV2No ratings yet
- Series: Operator'S ManualDocument152 pagesSeries: Operator'S ManualZied Raouak100% (1)
- FANUC's Standard SCA Sealing Programming (Version4.0)Document20 pagesFANUC's Standard SCA Sealing Programming (Version4.0)Leinad OicaloNo ratings yet
- B 83924enDocument94 pagesB 83924enkamil chlebekNo ratings yet
- Devicenet FanucDocument58 pagesDevicenet FanucIbarra Aaron100% (1)
- Dokumen - Tips - Fanuc Robotics System R j3 Controller S 430i Series Mechanical Unit Maintenance Manual Marm3s43009801e Rev B PDFDocument4 pagesDokumen - Tips - Fanuc Robotics System R j3 Controller S 430i Series Mechanical Unit Maintenance Manual Marm3s43009801e Rev B PDFMabrouk GuezatiNo ratings yet
- BookDocument212 pagesBookVelez100% (1)
- R30iB Pendant Customization Guide V8 30 MAROBCG8304141E Rev A PDFDocument219 pagesR30iB Pendant Customization Guide V8 30 MAROBCG8304141E Rev A PDFdenix49No ratings yet
- Setting Up A Password System On Fanuc Robots (R-30iB V8.30P)Document7 pagesSetting Up A Password System On Fanuc Robots (R-30iB V8.30P)Amine AbassiNo ratings yet
- VisionR 30iaDocument14 pagesVisionR 30iaNahum Alamilla100% (3)
- MANTENIMIENTO ELECTRICO ROBOTS CONTROLADOR RJ3iB ESP PDFDocument170 pagesMANTENIMIENTO ELECTRICO ROBOTS CONTROLADOR RJ3iB ESP PDFViri Hernandez MarquezNo ratings yet
- GM Global 3 - Dispense Setup Users ManualDocument48 pagesGM Global 3 - Dispense Setup Users ManualFábio SousaNo ratings yet
- Powerwave ManagerDocument128 pagesPowerwave ManagerJackson Dias RochaNo ratings yet
- IRC5-DeviceNet Application Manual3HAC020676-001 RevB enDocument155 pagesIRC5-DeviceNet Application Manual3HAC020676-001 RevB enadriano_falavinha9186No ratings yet
- ServogunSetupUsersManual v1.0Document64 pagesServogunSetupUsersManual v1.0Rodrigo_Roboter100% (5)
- Mechanical Unit Parts (INTERNAL USE ONLY) PDFDocument656 pagesMechanical Unit Parts (INTERNAL USE ONLY) PDFJavii GarciiaNo ratings yet
- 1cdDocument91 pages1cdJustine Paul RajNo ratings yet
- Fanucprofibusdp 04Document279 pagesFanucprofibusdp 04dfsfgNo ratings yet
- FANUC Series: Operator'S ManualDocument104 pagesFANUC Series: Operator'S ManualZied RaouakNo ratings yet
- Spot and Motorgun - DX200 - RE-CSO-A046.4 PDFDocument825 pagesSpot and Motorgun - DX200 - RE-CSO-A046.4 PDFBOSCO TECNONo ratings yet
- Fanuc Roboguide - V6.Xx User Manual (en-JP)Document132 pagesFanuc Roboguide - V6.Xx User Manual (en-JP)Ioana Apucaloaei100% (2)
- R-30iAMate LRHandlingTool UOP AssignmentsDocument9 pagesR-30iAMate LRHandlingTool UOP Assignmentsdenix49100% (1)
- Global Tip Dress Setup Users Manual For 7.50122013 REV 1.4Document48 pagesGlobal Tip Dress Setup Users Manual For 7.50122013 REV 1.4arturo100% (1)
- IRVision 3DL Operator Manual (A-86994EN01) (Preliminary)Document146 pagesIRVision 3DL Operator Manual (A-86994EN01) (Preliminary)Raphael Gomes RodriguesNo ratings yet
- MOS (Installation of Ceramic Tile) REV2Document3 pagesMOS (Installation of Ceramic Tile) REV2Don Roseller DumayaNo ratings yet
- Variables de Sistema FANUCDocument770 pagesVariables de Sistema FANUCLakisha Blevins50% (4)
- Global Error Recovery (FFR) Users Manual Fanuc Spottool+ 7.50 P/XXDocument17 pagesGlobal Error Recovery (FFR) Users Manual Fanuc Spottool+ 7.50 P/XXarturoNo ratings yet
- Fanuc ARC Mate 100ibe 120ibeDocument4 pagesFanuc ARC Mate 100ibe 120ibeAzimatronics SA de CV100% (1)
- B-75114en 04Document210 pagesB-75114en 04akshay pawarNo ratings yet
- Tarjeta IO EA Robot FanucDocument3 pagesTarjeta IO EA Robot FanucDracoRodriguezNo ratings yet
- A - Inhaltsverzeichnis - R30IB Rev 9Document17 pagesA - Inhaltsverzeichnis - R30IB Rev 9Quí Lâm NguyễnNo ratings yet
- LR Mate 100 Ibm ManualDocument144 pagesLR Mate 100 Ibm ManualManuel GutierrezNo ratings yet
- Motoman Concurrent IoDocument341 pagesMotoman Concurrent IoArmando Rojas0% (1)
- Training Catalog & Course ScheduleDocument38 pagesTraining Catalog & Course Scheduleamir65esfNo ratings yet
- Adept Robot Control Library StartupGuide en 201605 P103-E1-01Document72 pagesAdept Robot Control Library StartupGuide en 201605 P103-E1-01ycemalNo ratings yet
- Servo FloatDocument22 pagesServo FloatMichał MarczakNo ratings yet
- IAI 02 RC General CJ0203-2A P001-144 SliderDocument144 pagesIAI 02 RC General CJ0203-2A P001-144 SliderElectromateNo ratings yet
- Aluminium Motors PDFDocument8 pagesAluminium Motors PDFelrajilNo ratings yet
- md1 StressesDocument3 pagesmd1 StressesJB_0929No ratings yet
- Hand Tool SafetyDocument1 pageHand Tool SafetymardyNo ratings yet
- Datasheet DP-04 06 10 Ha0002 EN PDFDocument8 pagesDatasheet DP-04 06 10 Ha0002 EN PDFRicham HamzeNo ratings yet
- Material Received Project MMS 2020-2022 NEWDocument121 pagesMaterial Received Project MMS 2020-2022 NEWDebby AnggaraNo ratings yet
- Spec Sheet Storage BoxDocument1 pageSpec Sheet Storage BoxMuhamad Syaiful AnwarNo ratings yet
- ASSIGNMENT of Machine DesignDocument1 pageASSIGNMENT of Machine DesignAshu PrajapatiNo ratings yet
- Axial Load On Column CalculationDocument4 pagesAxial Load On Column CalculationMohdDanishNo ratings yet
- Hexagon Head Bolts/Screws: Metric Series-DimensionsDocument7 pagesHexagon Head Bolts/Screws: Metric Series-DimensionsVishal MistryNo ratings yet
- 300-02 # ST 1220, Four Leg Wire Rope SlingDocument3 pages300-02 # ST 1220, Four Leg Wire Rope SlingAgeng LaksitoNo ratings yet
- User's Manual - Compressor IODM 70-3-19 - PDF - Valve - Gas CompressorDocument98 pagesUser's Manual - Compressor IODM 70-3-19 - PDF - Valve - Gas CompressorYogesh gaurNo ratings yet
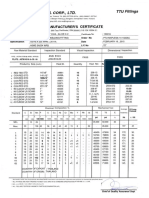
- TTU Fittings Ttu Industrial LTD.: Manufacturer'SDocument1 pageTTU Fittings Ttu Industrial LTD.: Manufacturer'SMohamed RaafatNo ratings yet
- MR426B9020A000Document7 pagesMR426B9020A000limadacarlosNo ratings yet
- Maintenance Preventive / Preventive Maintenance Lot Rep QT REF DesignationDocument1 pageMaintenance Preventive / Preventive Maintenance Lot Rep QT REF DesignationMedjahdi RafikNo ratings yet
- Centrifugal Compressor Axial Thrust: Hassan Mohamed A. M. HassanDocument12 pagesCentrifugal Compressor Axial Thrust: Hassan Mohamed A. M. HassanMosab AmmarNo ratings yet
- Nabl Assesment July 2021: End ReportDocument1 pageNabl Assesment July 2021: End ReportSainath AmudaNo ratings yet
- TRA035-Drilling For Anode InstallationDocument1 pageTRA035-Drilling For Anode InstallationHussein HishamNo ratings yet
- Operation Manual VERATRIS (2004-09 G19502230 FR)Document24 pagesOperation Manual VERATRIS (2004-09 G19502230 FR)vicomonsNo ratings yet
- JTA Light Weight Bevel Gearbox, Light Duty Bevel Gearbox, Smallest Aluminum 1 to 1 Ratio Miter Gearbox,Miniature Right Angle Gearbox,Micro Size Spiral Bevel Gearbox,Small 90 Degree Gearbox CatalogueDocument13 pagesJTA Light Weight Bevel Gearbox, Light Duty Bevel Gearbox, Smallest Aluminum 1 to 1 Ratio Miter Gearbox,Miniature Right Angle Gearbox,Micro Size Spiral Bevel Gearbox,Small 90 Degree Gearbox CatalogueWarren LeeNo ratings yet
- Safety Valves and Double Stop ValvesDocument24 pagesSafety Valves and Double Stop ValvesRahul PatilNo ratings yet
- 538 270 Thomas Series DBZ, Sizes 50 451 Disc Couplings ManualDocument4 pages538 270 Thomas Series DBZ, Sizes 50 451 Disc Couplings ManualpelakupasarNo ratings yet
- Bolted and Welded ConnectionsDocument2 pagesBolted and Welded ConnectionsKrunalsinh VirpuraNo ratings yet