You might also like
- Statics: Vector Mechanics For EngineersDocument22 pagesStatics: Vector Mechanics For EngineersYadana1No ratings yet
- CH 08Document30 pagesCH 08Vidya Amalia HarnindraNo ratings yet
- Ch09-Distributed Forces (Moments of Inertia)Document44 pagesCh09-Distributed Forces (Moments of Inertia)mantaptoNo ratings yet
- PowerPoint Slides Beer Chapter 17Document50 pagesPowerPoint Slides Beer Chapter 17PrathameshNo ratings yet
- Dynamics 13 LectureDocument98 pagesDynamics 13 LectureAdam100% (1)
- Dynamics: Vector Mechanics For EngineersDocument32 pagesDynamics: Vector Mechanics For EngineersKrishnakumar ThekkepatNo ratings yet
- Virtual work and mechanical systemsDocument21 pagesVirtual work and mechanical systemsLakshya GothwalNo ratings yet
- 11 Lecture PPT Rectilinear MotionDocument42 pages11 Lecture PPT Rectilinear MotionSim Je Han67% (3)
- Chapter 17 Plane Motion of Rigid Bodies (Repaired)Document52 pagesChapter 17 Plane Motion of Rigid Bodies (Repaired)Ng Shin JouNo ratings yet
- Statics: Vector Mechanics For EngineersDocument28 pagesStatics: Vector Mechanics For EngineersAgus KusnayatNo ratings yet
- Statics Vector MechanicsDocument16 pagesStatics Vector MechanicsaliNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument48 pagesDynamics: Vector Mechanics For EngineersvuliencnNo ratings yet
- 9 Beam Deflection-Mechanics of MaterialsDocument34 pages9 Beam Deflection-Mechanics of MaterialsNhân Trần100% (1)
- Statics NoteDocument26 pagesStatics NoteMei GuanNo ratings yet
- Deflection of BeamsDocument50 pagesDeflection of Beamstehpohkee100% (1)
- 353 35435 ME357 2011 4 2 1 Sheet MD2Document10 pages353 35435 ME357 2011 4 2 1 Sheet MD2adel nabhanNo ratings yet
- Overviews of StaticsDocument70 pagesOverviews of StaticsJacous WcyNo ratings yet
- Chapter06-Analysis of StructuresDocument32 pagesChapter06-Analysis of StructuresMat HarzickNo ratings yet
- Sol Cap 06 - Edicion 8 PDFDocument203 pagesSol Cap 06 - Edicion 8 PDFjorgeNo ratings yet
- Ch03 SolutionsDocument77 pagesCh03 SolutionsMat HarzickNo ratings yet
- Beer and Johnston Detailed Table of ContentsDocument10 pagesBeer and Johnston Detailed Table of Contentsdhruv001No ratings yet
- MECHANICS OF SOLIDS Course SyllabusDocument3 pagesMECHANICS OF SOLIDS Course SyllabusBalagopal VNo ratings yet
- Statics: Vector Mechanics For EngineersDocument8 pagesStatics: Vector Mechanics For EngineersmantaptoNo ratings yet
- Cap 14 Beer Dina 8 Ed by - Govata PDFDocument144 pagesCap 14 Beer Dina 8 Ed by - Govata PDFabelardoNo ratings yet
- Submitted To:: Lab ManualDocument30 pagesSubmitted To:: Lab ManualAbdul Azeem50% (2)
- Dynamics 15 LectureDocument106 pagesDynamics 15 Lecturelalo RodriguezNo ratings yet
- Hibbeler, Mechanics of Materials-Strain TransformationDocument62 pagesHibbeler, Mechanics of Materials-Strain Transformationpoom2007No ratings yet
- Formula Sheet Mechanics MaterialsDocument4 pagesFormula Sheet Mechanics MaterialsJames BuserNo ratings yet
- Google Search Results for "Fatigue Mechanical Lecture NotesDocument3 pagesGoogle Search Results for "Fatigue Mechanical Lecture NotesIslam0% (1)
- Dynamics 19 LectureDocument47 pagesDynamics 19 LecturePedro CarmonaNo ratings yet
- Equilibrium of Rigid BodiesDocument22 pagesEquilibrium of Rigid BodiesSpiro DourbalyNo ratings yet
- Equilibrium Statics ProblemsDocument10 pagesEquilibrium Statics ProblemsTheAznNo ratings yet
- Hibbeler Ch02 ExamplesDocument49 pagesHibbeler Ch02 ExamplesMúslimÄhIslamNo ratings yet
- BeerVM11e PPT Ch15Document110 pagesBeerVM11e PPT Ch15brayanNo ratings yet
- Mechanics of Materials: Stress and Strain - Axial LoadingDocument39 pagesMechanics of Materials: Stress and Strain - Axial Loading2828rockbayNo ratings yet
- C9789810694364SM PDFDocument34 pagesC9789810694364SM PDFJohnrey FlandezNo ratings yet
- Statics ReviewDocument4 pagesStatics Reviewsamir_ssh7151No ratings yet
- Ch09 Stress TransformationDocument116 pagesCh09 Stress TransformationMatthew MartinezNo ratings yet
- National Skill Training Institute, Mumbai: Draughtsman Mechanical, CitsDocument24 pagesNational Skill Training Institute, Mumbai: Draughtsman Mechanical, CitsNitin B maskeNo ratings yet
- Chapter 11 BendingDocument36 pagesChapter 11 BendingSang Ka KalaNo ratings yet
- Deflection and CamberDocument22 pagesDeflection and Camberkimberly buenaaguaNo ratings yet
- Chapter 4.c (Frame& Machine)Document26 pagesChapter 4.c (Frame& Machine)LogarithemNo ratings yet
- StrengthDocument5 pagesStrengthMUHAMMAD NURNAJMINo ratings yet
- BeerVM11e PPT Ch01Document6 pagesBeerVM11e PPT Ch01Eizat FarisNo ratings yet
- CH 12Document118 pagesCH 12Priyanka CholletiNo ratings yet
- Engineering Mechanics DistributedForcesDocument47 pagesEngineering Mechanics DistributedForcesChamith KarunadharaNo ratings yet
- GE6253 - ENGINEERING MECHANICS - Unit 5 Friction - LECTURE NOTESDocument26 pagesGE6253 - ENGINEERING MECHANICS - Unit 5 Friction - LECTURE NOTESstkrNo ratings yet
- Statics NoteDocument29 pagesStatics NoteMei GuanNo ratings yet
- Lecture 4 - Design For Variable LoadingDocument37 pagesLecture 4 - Design For Variable LoadingHafiz AbdulRehmanNo ratings yet
- Wedges and ScrewsDocument4 pagesWedges and ScrewsK-Jay Eduku ArmahNo ratings yet
- ch05 Forces in Beams and CablesDocument71 pagesch05 Forces in Beams and CablesOnline Review SpecialistsNo ratings yet
- Statics ProblemsDocument36 pagesStatics ProblemsGiang TruongNo ratings yet
- MECHANICS OF MATERIALS REVIEWDocument23 pagesMECHANICS OF MATERIALS REVIEWlowCL100% (1)
- 9 1 Beam DeflectionDocument21 pages9 1 Beam Deflectionanon_288057816No ratings yet
- Chapter 6 Bending: Moments Forces Perpendicular To AxisDocument13 pagesChapter 6 Bending: Moments Forces Perpendicular To AxisSumaya MahmoodNo ratings yet
- Macromechanics - 1: Generalized Hooke's Law For Anisotropic LaminaDocument32 pagesMacromechanics - 1: Generalized Hooke's Law For Anisotropic LaminaIntan Khalida LukmanNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument68 pagesDynamics: Vector Mechanics For EngineersMarceloAbiNo ratings yet
- CH 09Document44 pagesCH 09afnene1No ratings yet
- 4 Kinetics of Particle-Impulse MomentumDocument30 pages4 Kinetics of Particle-Impulse MomentumAkmal Bin Saipul AnuarNo ratings yet
- VECTOR MECHANICS FOR ENGINEERS Chapter 16Document19 pagesVECTOR MECHANICS FOR ENGINEERS Chapter 16Yohanes Elia PNo ratings yet
- Guyed Tower Analysis Using Stability FunctionsDocument10 pagesGuyed Tower Analysis Using Stability FunctionsAfia S HameedNo ratings yet
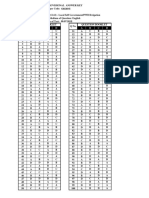
- Multiple Choice Type Questions and Answers 201Document16 pagesMultiple Choice Type Questions and Answers 201Afia S HameedNo ratings yet
- ANSYS simulation of beam bendingDocument23 pagesANSYS simulation of beam bendingpatrickNX9420No ratings yet
- Method of SectionDocument10 pagesMethod of SectionAfia S HameedNo ratings yet
- BEng PaperDocument5 pagesBEng PaperAfia S Hameed100% (1)
- 115 Sample Chapter PDFDocument111 pages115 Sample Chapter PDFAmey GudigarNo ratings yet
- Beam Deflection FormulaeDocument2 pagesBeam Deflection Formulae7575757575100% (6)
- Extraordinary Gazette Date:-28.06.2017 Last Date: 02.08.2017 Category No: 218/2017Document2 pagesExtraordinary Gazette Date:-28.06.2017 Last Date: 02.08.2017 Category No: 218/2017Afia S HameedNo ratings yet
- 1 s2.0 S0141029617303577 MainDocument13 pages1 s2.0 S0141029617303577 MainAfia S HameedNo ratings yet
- Structural Analysis Force MethodsDocument24 pagesStructural Analysis Force MethodsAfia S HameedNo ratings yet
- AnsysDocument46 pagesAnsysapi-3719538100% (9)
- Use The Xbox App To Record Your Screen in Windows 10Document7 pagesUse The Xbox App To Record Your Screen in Windows 10Afia S HameedNo ratings yet
- Plate GirderDocument11 pagesPlate GirderAfia S HameedNo ratings yet
- Ansys TipsDocument79 pagesAnsys TipsMuhammad AliNo ratings yet
- Area Under ParabolaDocument6 pagesArea Under ParabolaAfia S HameedNo ratings yet
- DESIGN OF PLATE GIRDERS USING IS:800-2007Document45 pagesDESIGN OF PLATE GIRDERS USING IS:800-2007Afia S HameedNo ratings yet
- Current Affairs PDF December 2014 PDFDocument31 pagesCurrent Affairs PDF December 2014 PDFsureshraj220No ratings yet
- Intro PDFDocument1 pageIntro PDFAfia S HameedNo ratings yet
- Schedule: IS:800-2007 (General Construction in Steel - Code of Practice)Document2 pagesSchedule: IS:800-2007 (General Construction in Steel - Code of Practice)Afia S HameedNo ratings yet
- BeamDocument18 pagesBeamAfia S Hameed100% (1)
- Limit StateDocument16 pagesLimit StateAfia S HameedNo ratings yet
- 1 IntroductionDocument13 pages1 IntroductionAfia S HameedNo ratings yet
- Renaissance in Kerala Part - 1 - PSC Rankfile 24 - 7 - More Information, More MarkDocument4 pagesRenaissance in Kerala Part - 1 - PSC Rankfile 24 - 7 - More Information, More MarkAfia S HameedNo ratings yet
- Lec Notes-1Document5 pagesLec Notes-1Mehul JoshieNo ratings yet
- The Day of Laziness Will Be Soon For The All The PersondsDocument1 pageThe Day of Laziness Will Be Soon For The All The PersondsAfia S HameedNo ratings yet
- GKDocument7 pagesGKAfia S HameedNo ratings yet
- Pky 130 15Document1 pagePky 130 15Afia S HameedNo ratings yet
- ContentsDocument4 pagesContentsAfia S HameedNo ratings yet
- Sa 11Document1 pageSa 11Afia S HameedNo ratings yet
- The Day of Laziness Will Be Soon For The AllDocument1 pageThe Day of Laziness Will Be Soon For The AllAfia S HameedNo ratings yet