You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Imca m190 Rev.1 (Cat A B C)Document4 pagesImca m190 Rev.1 (Cat A B C)Xa MauNo ratings yet
- Imca m190 Rev.1 (Cat A B C)Document4 pagesImca m190 Rev.1 (Cat A B C)Xa MauNo ratings yet
- Spark Plug AnalysisDocument25 pagesSpark Plug AnalysisXa MauNo ratings yet
- Abstract Sensors Bar SeverDocument1 pageAbstract Sensors Bar SeverXa MauNo ratings yet
- Fieldbus Independent I/O Modules 2 DO 230V AC 1.0 A/ Relay 2 CO/Pot. Free 750-517Document14 pagesFieldbus Independent I/O Modules 2 DO 230V AC 1.0 A/ Relay 2 CO/Pot. Free 750-517Xa MauNo ratings yet
- Techop External InterfacesDocument30 pagesTechop External InterfacesXa MauNo ratings yet
- 32 - Techop Cross ConnectionsDocument34 pages32 - Techop Cross ConnectionsXa MauNo ratings yet
- Wideband Fusion LBL and Usbl: Construction Survey Positioning SystemsDocument12 pagesWideband Fusion LBL and Usbl: Construction Survey Positioning SystemsXa MauNo ratings yet
- DP Personnel Guidance For Professional DevelopmentDocument26 pagesDP Personnel Guidance For Professional DevelopmentXa MauNo ratings yet
- +/-10v Isolated Analog Input Module: Product Specifications and Installation DataDocument4 pages+/-10v Isolated Analog Input Module: Product Specifications and Installation DataXa MauNo ratings yet
- Datasheet: Compatt Flotation CollarDocument2 pagesDatasheet: Compatt Flotation CollarXa MauNo ratings yet
- Lat LongDocument24 pagesLat LongXa MauNo ratings yet
- Fieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Document14 pagesFieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Xa MauNo ratings yet
- 8132 8133 PDFDocument2 pages8132 8133 PDFXa MauNo ratings yet
- Acoustics Flexible DavisDocument20 pagesAcoustics Flexible DavisXa MauNo ratings yet
- Cisco Content Services Switch Redundancy Configuration GuideDocument160 pagesCisco Content Services Switch Redundancy Configuration GuideXa MauNo ratings yet
- Chapter 2 PDFDocument72 pagesChapter 2 PDFXa MauNo ratings yet
- Datasheet: Dynamic Positioning Transponder (DPT)Document2 pagesDatasheet: Dynamic Positioning Transponder (DPT)Xa MauNo ratings yet
- Title: DPS Notations - Clarifying The Role of Classification (Through Frequently Asked Questions and Answers) Authors: George Reilly and Pedro SantosDocument1 pageTitle: DPS Notations - Clarifying The Role of Classification (Through Frequently Asked Questions and Answers) Authors: George Reilly and Pedro SantosXa MauNo ratings yet
- Newapps HughesDocument14 pagesNewapps HughesXa MauNo ratings yet
- Design Se WonDocument17 pagesDesign Se WonXa MauNo ratings yet
- Dynamic Positioning Committee: A Unique 10,000-ft Water Depth Dynamically Positioned Semisubmersible Drilling VesselDocument9 pagesDynamic Positioning Committee: A Unique 10,000-ft Water Depth Dynamically Positioned Semisubmersible Drilling VesselXa MauNo ratings yet
- Improved Usability in DP Tracking Operations: Author's Name Name of The Paper SessionDocument14 pagesImproved Usability in DP Tracking Operations: Author's Name Name of The Paper SessionXa MauNo ratings yet
- Operations PearceDocument9 pagesOperations PearceXa MauNo ratings yet
- Power Quality Improvement Using Shunt Active Power FilterDocument5 pagesPower Quality Improvement Using Shunt Active Power FilterEditor IJTSRDNo ratings yet
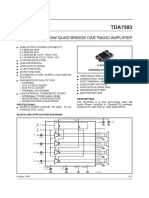
- 4 X 30W Quad Bridge Car Radio Amplifier: DescriptionDocument12 pages4 X 30W Quad Bridge Car Radio Amplifier: DescriptionEduardoGaleanoNo ratings yet
- Variable Frequency Drives: Presented By: Rajarshi Ghose Dastidar. ROLL: 149. REGD. NO: 070906360Document54 pagesVariable Frequency Drives: Presented By: Rajarshi Ghose Dastidar. ROLL: 149. REGD. NO: 070906360Rajarshi Ghose Dastidar100% (1)
- 01216916Document11 pages01216916Rangga AnggaraNo ratings yet
- Induction Motor DrivesDocument73 pagesInduction Motor DrivesSai Pranahita KulithalaiNo ratings yet
- ch1 Introductiontopq Bev40603Document46 pagesch1 Introductiontopq Bev40603Nur DaniaNo ratings yet
- Up 2210 R PDFDocument18 pagesUp 2210 R PDFkggganiNo ratings yet
- Analysis and Performance Assessment of The Active Frequency Drift Method of Islanding Prevention - 00790956Document7 pagesAnalysis and Performance Assessment of The Active Frequency Drift Method of Islanding Prevention - 00790956Marcos Rosa dos SantosNo ratings yet
- Generator Protection XZCDocument25 pagesGenerator Protection XZCblaagica100% (1)
- Trapezoidal PWM Scheme For Cascaded Multilevel InverterDocument5 pagesTrapezoidal PWM Scheme For Cascaded Multilevel InverterRodovarNo ratings yet
- Dynacomp: The Top-Class Reactive Power CompensatorDocument8 pagesDynacomp: The Top-Class Reactive Power CompensatorJOSE DANIEL PEREZNo ratings yet
- Electronic DistortionDocument11 pagesElectronic DistortionAnonymous T80ItdO3No ratings yet
- Modeling and Analysis of 6 Phase Synchronous MotorDocument14 pagesModeling and Analysis of 6 Phase Synchronous MotorArif IqbalNo ratings yet
- Lec 1 PowerDocument15 pagesLec 1 PowerAntonNo ratings yet
- Compliance To Philippine Distribution CodeDocument3 pagesCompliance To Philippine Distribution CodeEdward NewgateNo ratings yet
- TE30 Data Sheet en 2016-03Document4 pagesTE30 Data Sheet en 2016-03Christian AguirreNo ratings yet
- Mk6E Brochure EnglishDocument2 pagesMk6E Brochure EnglishBangun IstiartoNo ratings yet
- A New Control Structure For Grid-Connected LCLDocument7 pagesA New Control Structure For Grid-Connected LCLpmih1No ratings yet
- Ee8006 Power Quality: Diploma, Anna Univ UG & PG CoursesDocument2 pagesEe8006 Power Quality: Diploma, Anna Univ UG & PG CoursesBALAKRISHNANNo ratings yet
- Active Harmonic Filter (AHF) : Shivaji WaghmareDocument10 pagesActive Harmonic Filter (AHF) : Shivaji Waghmaremani_208eeNo ratings yet
- Effects of Power Electronics Devices On The Energy QualityDocument10 pagesEffects of Power Electronics Devices On The Energy QualityMauricio SilveraNo ratings yet
- ADE7880 Medidor de EnergiaDocument104 pagesADE7880 Medidor de EnergiaJeziel Vazquez NavaNo ratings yet
- MODEL NO.: N156B3-L0B: TFT LCD Preliminary SpecificationDocument29 pagesMODEL NO.: N156B3-L0B: TFT LCD Preliminary SpecificationJCP99No ratings yet
- Gujarat Technological UniversityDocument1 pageGujarat Technological UniversityAbdullahNo ratings yet
- Application of Magnetic Wedges For Stator Slots of HydrogeneratorsDocument8 pagesApplication of Magnetic Wedges For Stator Slots of HydrogeneratorsPit Sampras100% (1)
- McKenzie ThesisDocument135 pagesMcKenzie Thesispreeti200726No ratings yet
- Lecture - 5: DC-AC Converters: Ug - ProgramDocument54 pagesLecture - 5: DC-AC Converters: Ug - ProgramArife AbdulkerimNo ratings yet
- Elnet GR-PQ - User Manual 29.10.12 PDFDocument89 pagesElnet GR-PQ - User Manual 29.10.12 PDFAhmed TarekNo ratings yet
- Delta Conversion Principles enDocument15 pagesDelta Conversion Principles enDustin GrahamNo ratings yet
- Design of Single Phase H-Bridge Multilevel Inverter Using Microcontroller Atmel 89c51Document52 pagesDesign of Single Phase H-Bridge Multilevel Inverter Using Microcontroller Atmel 89c51Sabir VeNo ratings yet