You might also like
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Lec2 Starting With Redhawk 0Document78 pagesLec2 Starting With Redhawk 0sathyanarainraoNo ratings yet
- KP01 Installation ManualDocument19 pagesKP01 Installation ManualDiradivo Vakaikop100% (1)
- L100 MultistageFreq II (2UP)Document6 pagesL100 MultistageFreq II (2UP)Van Nguyen Huu VanNo ratings yet
- Elec 380 Course NotesDocument210 pagesElec 380 Course NotesgranitebricksNo ratings yet
- Op Amp DesignDocument8 pagesOp Amp DesignSermalingam ChandrasekarNo ratings yet
- Feedback TopologyDocument6 pagesFeedback Topologyilg1No ratings yet
- Solutions2CMOS CircuitDesign AllenDocument509 pagesSolutions2CMOS CircuitDesign AllenAnil KumarNo ratings yet
- Smith ChartDocument14 pagesSmith ChartEmiaj LabampaNo ratings yet
- Lecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveDocument6 pagesLecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveVan Nguyen Huu VanNo ratings yet
- Chap06 (6 24 06)Document74 pagesChap06 (6 24 06)pumba1234No ratings yet
- GATE EE 2007 With SolutionsDocument62 pagesGATE EE 2007 With SolutionsAbhishek MohanNo ratings yet
- Analog CircuitsDocument52 pagesAnalog CircuitsrohanvermaaaaaNo ratings yet
- Homework SolutionsDocument46 pagesHomework SolutionsKashif AmjadNo ratings yet
- OpAmp ExampleDocument16 pagesOpAmp ExampleYi Ming Tan100% (1)
- Microelectronic Circuits: Amplifier BasicsDocument57 pagesMicroelectronic Circuits: Amplifier BasicsAkshay AnandNo ratings yet
- ProblemasDocument18 pagesProblemasAnxo Do ForteNo ratings yet
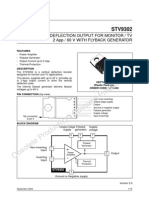
- STV 9302Document15 pagesSTV 9302krish8717No ratings yet
- B Network 09-09-16 1494Document10 pagesB Network 09-09-16 1494arunNo ratings yet
- EE-EC - RIB (W) - Control Sys - 13-08-16 - SK1-sol - 1391Document9 pagesEE-EC - RIB (W) - Control Sys - 13-08-16 - SK1-sol - 1391arunNo ratings yet
- Chapter 1Document39 pagesChapter 1ÎQbãl HãikãmNo ratings yet
- Chapter 4. Analog Building Blocks An Intuitive Approach (Analog IC Design An Intuitive Approach)Document33 pagesChapter 4. Analog Building Blocks An Intuitive Approach (Analog IC Design An Intuitive Approach)Minh Hai RungNo ratings yet
- EE: Electrical Engineering: Test Series - 1Document8 pagesEE: Electrical Engineering: Test Series - 1bhurajeshNo ratings yet
- Lecture 050 - Followers: (READING: GHLM - 344-362, AH - 221-226) ObjectiveDocument7 pagesLecture 050 - Followers: (READING: GHLM - 344-362, AH - 221-226) ObjectiveArchana RkNo ratings yet
- Chapter 3. Single-Transistor Primitives An Intuitive Approach (Analog IC Design An Intuitive Approach)Document26 pagesChapter 3. Single-Transistor Primitives An Intuitive Approach (Analog IC Design An Intuitive Approach)Minh Hai RungNo ratings yet
- Multistage AmplifierDocument22 pagesMultistage AmplifierVijay AnandhNo ratings yet
- Cmos Op Amp PDFDocument13 pagesCmos Op Amp PDFLokesh NikhadeNo ratings yet
- Common Drain Amplifier or Source Follower: 1. Low Frequency Small Signal Equivalent CircuitDocument16 pagesCommon Drain Amplifier or Source Follower: 1. Low Frequency Small Signal Equivalent CircuitPadaliya ShreyaNo ratings yet
- Samsung Plasma Training ManualDocument57 pagesSamsung Plasma Training Manualedsel72100% (2)
- Design of Phase-Lead CompensatorDocument13 pagesDesign of Phase-Lead CompensatorAsif MudgalNo ratings yet
- Lecture17 Fully Diff Amps CMFBDocument28 pagesLecture17 Fully Diff Amps CMFBmohamedNo ratings yet
- Charge PumpsDocument18 pagesCharge PumpsBLUEE009No ratings yet
- Lecture13Document5 pagesLecture13ohenri100No ratings yet
- Power Amplifier Example QuestionsDocument8 pagesPower Amplifier Example QuestionsShah IzzatNo ratings yet
- Irg4Pc50Kd: FeaturesDocument11 pagesIrg4Pc50Kd: FeaturesLUDWINGNo ratings yet
- Allen and Holberg Homework SolutionDocument121 pagesAllen and Holberg Homework SolutionNihit Varshney100% (1)
- Bipolar Junction Transistors (BJT) : NPN PNPDocument44 pagesBipolar Junction Transistors (BJT) : NPN PNPAli AhmadNo ratings yet
- Assimen Tronic 2Document23 pagesAssimen Tronic 2Shafiq HafizullahNo ratings yet
- 5 Two Port NetworksDocument14 pages5 Two Port NetworksNitinNo ratings yet
- Answers in AC MachinesDocument3 pagesAnswers in AC MachinesRonald James DiazNo ratings yet
- 3 Current SRCDocument10 pages3 Current SRCmelwyn_thomasNo ratings yet
- Electronic 2 Solved ProblemDocument8 pagesElectronic 2 Solved ProblemAbdullah S OthmanNo ratings yet
- Problem Solutions: R R R R V I R R IDocument69 pagesProblem Solutions: R R R R V I R R IAkhila RajagopalNo ratings yet
- Folded Cascode OpampDocument6 pagesFolded Cascode OpampsinamahaniNo ratings yet
- ECE102 - F12 ProSet 7 PDFDocument37 pagesECE102 - F12 ProSet 7 PDFlokeshwarrvrjcNo ratings yet
- EEEN221 Assignment 01 With Answers 01Document15 pagesEEEN221 Assignment 01 With Answers 01Lame MorupisiNo ratings yet
- EEE 241 EEE 241 Analog Electronics 1 Tutorial Tutorial DR Norlaili Mohd NohDocument42 pagesEEE 241 EEE 241 Analog Electronics 1 Tutorial Tutorial DR Norlaili Mohd NohMd Anwar HossainNo ratings yet
- ELE315 Midterm 2012 SolutionsDocument7 pagesELE315 Midterm 2012 SolutionsOsman ZenginNo ratings yet
- Introduction To Switched-Mode Converter Modeling Using MATLAB/SimulinkDocument37 pagesIntroduction To Switched-Mode Converter Modeling Using MATLAB/SimulinkAhana MalhotraNo ratings yet
- G4BC30KD-International Rectifier PDFDocument10 pagesG4BC30KD-International Rectifier PDFPablo AllosiaNo ratings yet
- Pspice Tutorial AcDocument89 pagesPspice Tutorial AcZadziorNo ratings yet
- 365 Signal ConditioningDocument29 pages365 Signal ConditioningSunilkumar ReddyNo ratings yet
- Working With Phasors and Using Complex Polar Notation in MATLAB/OctaveDocument5 pagesWorking With Phasors and Using Complex Polar Notation in MATLAB/Octaveel_ruso__83No ratings yet
- IGBT Plasma Panasonic Placa Ysus IRG4BC40UDocument8 pagesIGBT Plasma Panasonic Placa Ysus IRG4BC40UAntonio ChavezNo ratings yet
- MVLSI QB SolutionsDocument51 pagesMVLSI QB SolutionsKeependarNo ratings yet
- Lecture 250 - Introduction To Feedback Concepts: (READING: GHLM - 553-563) ObjectiveDocument8 pagesLecture 250 - Introduction To Feedback Concepts: (READING: GHLM - 553-563) ObjectiveVan Nguyen Huu VanNo ratings yet
- Irg 4 PF 50 WDocument8 pagesIrg 4 PF 50 WQuickerManNo ratings yet
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesFrom EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- AC Question Bank-SkDocument5 pagesAC Question Bank-SkShreerama Samartha G BhattaNo ratings yet
- EE 370, Lecture 13Document4 pagesEE 370, Lecture 13Shreerama Samartha G BhattaNo ratings yet
- EENG223 Lec05 OpAmpsDocument30 pagesEENG223 Lec05 OpAmpsShreerama Samartha G BhattaNo ratings yet
- Electromagnetic NotesDocument121 pagesElectromagnetic NotesShreerama Samartha G BhattaNo ratings yet
- ElectromagneticDocument125 pagesElectromagneticShatrughna SamalNo ratings yet
- 209 Ec 1111Document49 pages209 Ec 1111Shreerama Samartha G BhattaNo ratings yet
- 2 Literature ReviewDocument17 pages2 Literature ReviewShreerama Samartha G BhattaNo ratings yet
- LM1496Document7 pagesLM1496Shreerama Samartha G BhattaNo ratings yet
- F0Document20 pagesF0Shreerama Samartha G BhattaNo ratings yet
- An Daniel KuzmenkoHow To Connect A Bluetooth With An Arduino and Transfer Values in To MATLAB.Document13 pagesAn Daniel KuzmenkoHow To Connect A Bluetooth With An Arduino and Transfer Values in To MATLAB.Putrazakki AzharNo ratings yet
- Pulse Modulation Part 1Document14 pagesPulse Modulation Part 1Shreerama Samartha G BhattaNo ratings yet
- Sample 2Document2 pagesSample 2Shreerama Samartha G BhattaNo ratings yet
- V5i2 0434Document4 pagesV5i2 0434Shreerama Samartha G BhattaNo ratings yet
- Transis DualDocument11 pagesTransis DualShreerama Samartha G BhattaNo ratings yet
- Communication Lab IDocument25 pagesCommunication Lab IShreerama Samartha G BhattaNo ratings yet
- MSP Gang ProgrammerDocument123 pagesMSP Gang ProgrammerShreerama Samartha G BhattaNo ratings yet
- D1 10Document7 pagesD1 10Shreerama Samartha G BhattaNo ratings yet
- Communication Lab 2labDocument67 pagesCommunication Lab 2labShreerama Samartha G BhattaNo ratings yet
- Integrated Circuits La ManulDocument88 pagesIntegrated Circuits La ManulShreerama Samartha G BhattaNo ratings yet
- Sampling Frequency Selector Section: : ProcedureDocument3 pagesSampling Frequency Selector Section: : ProcedureShreerama Samartha G BhattaNo ratings yet
- ElieDocument8 pagesElieShreerama Samartha G BhattaNo ratings yet
- G' Area of Sphere Area of Antenna PatternDocument7 pagesG' Area of Sphere Area of Antenna PatternShreerama Samartha G BhattaNo ratings yet
- D FF Quiz Buzzer ProjectDocument2 pagesD FF Quiz Buzzer ProjectShreerama Samartha G BhattaNo ratings yet
- Fastest Finger Press Quiz Buzzer: Block DiagramDocument1 pageFastest Finger Press Quiz Buzzer: Block DiagramShreerama Samartha G BhattaNo ratings yet
- Graversen FinalDocument20 pagesGraversen FinalShreerama Samartha G BhattaNo ratings yet
- Unit4s SIDocument8 pagesUnit4s SIShreerama Samartha G BhattaNo ratings yet
- En - DM00025071 2Document44 pagesEn - DM00025071 2Shreerama Samartha G BhattaNo ratings yet
- Sung 97 InterfaceDocument6 pagesSung 97 InterfaceShreerama Samartha G BhattaNo ratings yet
- (Fixmag - Ru) Dv514s Service ManualDocument42 pages(Fixmag - Ru) Dv514s Service ManualevgeniyvictorovNo ratings yet
- Calculation of Positive Sequence ImpedanceDocument14 pagesCalculation of Positive Sequence ImpedancesathiyaseelanNo ratings yet
- 7SR17 Rho Catalogue Sheet PDFDocument20 pages7SR17 Rho Catalogue Sheet PDFMichael Roche0% (1)
- Icest 2011 977 930Document8 pagesIcest 2011 977 93001666754614No ratings yet
- Design of An Ultracapacitor Based Dynamic Voltage Restorer For Power Quality Enhancement in The Distribution GridDocument7 pagesDesign of An Ultracapacitor Based Dynamic Voltage Restorer For Power Quality Enhancement in The Distribution GridGRD JournalsNo ratings yet
- Lecture 20 PDFDocument12 pagesLecture 20 PDFRana Zeeshan UmerNo ratings yet
- EieDocument189 pagesEieImran MohiuddinNo ratings yet
- BS-II Module 1 - Students PDFDocument53 pagesBS-II Module 1 - Students PDFmuktha mukuNo ratings yet
- Very Low Dropout 3.0 Amp Regulator With Enable: Power Management Features DescriptionDocument10 pagesVery Low Dropout 3.0 Amp Regulator With Enable: Power Management Features DescriptionmitusharmaNo ratings yet
- EE 442 Homework #1: Problem 1 Wavelengths in Radio Applications (15 Points)Document6 pagesEE 442 Homework #1: Problem 1 Wavelengths in Radio Applications (15 Points)AsadRasheedNo ratings yet
- A Generic DMM Test and CalibrationDocument11 pagesA Generic DMM Test and CalibrationrobertNo ratings yet
- Lab-2 (Tutorial) Simulation of Lna (Cadence Spectrerf) : Prepared by Rashad.M.Ramzan Rashad@Isy - Liu.SeDocument18 pagesLab-2 (Tutorial) Simulation of Lna (Cadence Spectrerf) : Prepared by Rashad.M.Ramzan Rashad@Isy - Liu.Seblue-smart1355100% (1)
- Detection and Classification of Defects in Ceramic Insulators Using RF Antenna PDFDocument8 pagesDetection and Classification of Defects in Ceramic Insulators Using RF Antenna PDFRodick GansfordNo ratings yet
- Magnetron AmplifierDocument5 pagesMagnetron AmplifierroccosanNo ratings yet
- Terminal and CordDocument4 pagesTerminal and Cordbee398No ratings yet
- EXPERIMENT NO 3 (Comparator)Document2 pagesEXPERIMENT NO 3 (Comparator)Jaideep Singh100% (2)
- Practical Electronics 2023-01Document76 pagesPractical Electronics 2023-01László JásznagyNo ratings yet
- Industrial High VoltageDocument184 pagesIndustrial High VoltageStaines84100% (6)
- Datasheet lf356 PDFDocument23 pagesDatasheet lf356 PDFAlberto Chica CardenasNo ratings yet
- 4-Channel FM Radio System: Instruction ManualDocument20 pages4-Channel FM Radio System: Instruction ManualElton Marcel PadiaNo ratings yet
- Albert Abrams For WebDocument7 pagesAlbert Abrams For Webapi-232178087100% (1)
- Network AnalysisDocument2 pagesNetwork AnalysisPandit SumitNo ratings yet
- Birkett Cable Joints PDFDocument2 pagesBirkett Cable Joints PDFtobyNo ratings yet
- Ixys P-Channel Power Mosfets and Applications Abdus Sattar, Kyoung-Wook Seok, Ixan0064Document14 pagesIxys P-Channel Power Mosfets and Applications Abdus Sattar, Kyoung-Wook Seok, Ixan0064Kikuvi JohnNo ratings yet
- Alstom's ECO 100 PlatformDocument23 pagesAlstom's ECO 100 Platformopzz_opzz100% (1)
- Design of A Photovoltaic-Wind Hybrid PowerDocument76 pagesDesign of A Photovoltaic-Wind Hybrid PowerAwgichwAsefaNo ratings yet
- The Technician's Emi HandbookDocument248 pagesThe Technician's Emi HandbookEdgarNo ratings yet
- Cs 6 P 235 PXDocument2 pagesCs 6 P 235 PXonurkaya1No ratings yet