You might also like
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsFrom EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsRating: 3 out of 5 stars3/5 (1)
- Readings in Hardware/Software Co-DesignFrom EverandReadings in Hardware/Software Co-DesignRating: 3 out of 5 stars3/5 (1)
- Design of Embedded Systems: An IntroductionDocument13 pagesDesign of Embedded Systems: An IntroductionChandrashekar ChannabasappaNo ratings yet
- 6 Stages of Creating Embedded System ArchitecturesDocument45 pages6 Stages of Creating Embedded System ArchitecturesAndi K IndrawanNo ratings yet
- Embedded System Programming: Manasvi Mehta BCA-16 Roll No.-0800818093 UPTEC Computer Consultancy AllahabadDocument16 pagesEmbedded System Programming: Manasvi Mehta BCA-16 Roll No.-0800818093 UPTEC Computer Consultancy AllahabadManasvi MehtaNo ratings yet
- Hardware/Software Design of Embedded Systems: Sudeep PasrichaDocument50 pagesHardware/Software Design of Embedded Systems: Sudeep PasrichapareddyNo ratings yet
- International Journal in Foundations of Computer Science & Information Technology (IJFCSIT)Document2 pagesInternational Journal in Foundations of Computer Science & Information Technology (IJFCSIT)CS & ITNo ratings yet
- Introduction to Embedded SystemsDocument32 pagesIntroduction to Embedded SystemsTamiru DerejeNo ratings yet
- 2016 Fall Week 1 LectureDocument40 pages2016 Fall Week 1 LectureTrai TranNo ratings yet
- Introduction To Embedded System Design: © Lothar Thiele ETH Zurich, SwitzerlandDocument51 pagesIntroduction To Embedded System Design: © Lothar Thiele ETH Zurich, SwitzerlandBhawana DangwalNo ratings yet
- Lecture 3 Classification of Embedded SystemsDocument22 pagesLecture 3 Classification of Embedded SystemsSaikrishnaNo ratings yet
- Nidhi Patel - Electrical Engineer.Document2 pagesNidhi Patel - Electrical Engineer.Salman KhanNo ratings yet
- Morris Mano Ch01pptDocument25 pagesMorris Mano Ch01pptMd Abdulla Al MamunNo ratings yet
- International Journal in Foundations of Computer Science & Information Technology (IJFCSIT)Document2 pagesInternational Journal in Foundations of Computer Science & Information Technology (IJFCSIT)CS & ITNo ratings yet
- International Journal in Foundations of Computer Science & Information Technology (IJFCSIT)Document2 pagesInternational Journal in Foundations of Computer Science & Information Technology (IJFCSIT)CS & ITNo ratings yet
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNNo ratings yet
- Course Outline BCS 2114 Introduction To Computer SystemsDocument3 pagesCourse Outline BCS 2114 Introduction To Computer SystemsSmasher AustineNo ratings yet
- Jawaharlal Nehru Technological University Hyderabad M.Tech. Degree COURSE STRUCTURE in Vlsi I YEAR - I Semester Code Group Subject L P CreditsDocument12 pagesJawaharlal Nehru Technological University Hyderabad M.Tech. Degree COURSE STRUCTURE in Vlsi I YEAR - I Semester Code Group Subject L P Creditsshaker423No ratings yet
- Lecture 01 - IntroductionDocument101 pagesLecture 01 - IntroductionNguyễn Tấn ĐịnhNo ratings yet
- Hardware-Software Codesign: Jan Beutel & Iuliana Bacivarov Based On Material by Lothar ThieleDocument24 pagesHardware-Software Codesign: Jan Beutel & Iuliana Bacivarov Based On Material by Lothar ThieleEnas DhuhriNo ratings yet
- Embedded Systems: MBA - Tech. - EXTC Sem Vii AY 2022-2023Document90 pagesEmbedded Systems: MBA - Tech. - EXTC Sem Vii AY 2022-2023Aakarsh KumarNo ratings yet
- International Journal in Foundations of Computer Science & Information Technology (IJFCSIT)Document2 pagesInternational Journal in Foundations of Computer Science & Information Technology (IJFCSIT)CS & ITNo ratings yet
- Lecture 04: Detail System Analysis CSC 401: Database Management SystemDocument23 pagesLecture 04: Detail System Analysis CSC 401: Database Management SystemMeraj Mohammed BhuiyanNo ratings yet
- Motion Controlled Game Using Computer VisionDocument16 pagesMotion Controlled Game Using Computer Visionvrushali patilNo ratings yet
- Call For Papers - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Papers - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNNo ratings yet
- CS 230 - Distributed SystemsDocument37 pagesCS 230 - Distributed SystemsPaul Lopez TitoNo ratings yet
- Computer Science: Members: KABORE LandryDocument22 pagesComputer Science: Members: KABORE LandryLandry KaboreNo ratings yet
- "Blue Eye Technology": SeminarDocument47 pages"Blue Eye Technology": SeminarjayaNo ratings yet
- ISSN: 2231-3117 (Online) 2231-3605 (Print)Document1 pageISSN: 2231-3117 (Online) 2231-3605 (Print)ijcseitNo ratings yet
- Intrusion Detection System: Bachelor of EngineeringDocument14 pagesIntrusion Detection System: Bachelor of EngineeringAbhishek KhandalNo ratings yet
- Digital Systems DesignDocument267 pagesDigital Systems Designsakib israkNo ratings yet
- ISSN: 2231-3117 (Online) 2231-3605 (Print)Document1 pageISSN: 2231-3117 (Online) 2231-3605 (Print)ijcseitNo ratings yet
- Intro Embedded SystemsDocument16 pagesIntro Embedded Systemsdheep_infotel3985No ratings yet
- L2 ICT - UNIT 2: Technology Systems Revision Template: Subject Notes Revision Done CPU Central Processing UnitDocument6 pagesL2 ICT - UNIT 2: Technology Systems Revision Template: Subject Notes Revision Done CPU Central Processing Unitapi-591240586No ratings yet
- Session Two Business Impacts of ICTDocument45 pagesSession Two Business Impacts of ICTISAACNo ratings yet
- System Software An Introduction To Systems Programming Leland L Beck 3rd Edition Addison Wesley 1997 PDFDocument40 pagesSystem Software An Introduction To Systems Programming Leland L Beck 3rd Edition Addison Wesley 1997 PDFNameera NameeraNo ratings yet
- Chapter 1 PDFDocument127 pagesChapter 1 PDFAhmed Al-MasoodiNo ratings yet
- Intro PDFDocument36 pagesIntro PDFMawar IndahNo ratings yet
- Leakage AnswersDocument58 pagesLeakage Answersreputation.com.ngNo ratings yet
- Contiki OS & Cooja Network Simulator GuideDocument37 pagesContiki OS & Cooja Network Simulator GuideNikita NegiNo ratings yet
- ASC Cap1 2018 2019 PDFDocument194 pagesASC Cap1 2018 2019 PDFMadalina IlauNo ratings yet
- Jonathan Valvano University of Texas at Austin Valvano@mail - Utexas.eduDocument44 pagesJonathan Valvano University of Texas at Austin Valvano@mail - Utexas.eduFreya OlamitNo ratings yet
- Mykhaylo Batalinskyy's Resume - Business Analyst, System Architect, Software EngineerDocument4 pagesMykhaylo Batalinskyy's Resume - Business Analyst, System Architect, Software Engineerpravin katreNo ratings yet
- M.Tech. Sensor Systems Technology Curriculum GuideDocument33 pagesM.Tech. Sensor Systems Technology Curriculum GuidePavan Sandeep V VNo ratings yet
- On-Chip Communication Architectures: System on Chip InterconnectFrom EverandOn-Chip Communication Architectures: System on Chip InterconnectNo ratings yet
- In Depth Security Vol. III: Proceedings of the DeepSec ConferencesFrom EverandIn Depth Security Vol. III: Proceedings of the DeepSec ConferencesNo ratings yet
- Serial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsFrom EverandSerial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsRating: 3.5 out of 5 stars3.5/5 (9)
- Embedded Software Design and Programming of Multiprocessor System-on-Chip: Simulink and System C Case StudiesFrom EverandEmbedded Software Design and Programming of Multiprocessor System-on-Chip: Simulink and System C Case StudiesNo ratings yet
- Interfacing PIC Microcontrollers: Embedded Design by Interactive SimulationFrom EverandInterfacing PIC Microcontrollers: Embedded Design by Interactive SimulationNo ratings yet
- Computer-Aided Design TechniquesFrom EverandComputer-Aided Design TechniquesE. WolfendaleNo ratings yet
- Resource Efficient LDPC Decoders: From Algorithms to Hardware ArchitecturesFrom EverandResource Efficient LDPC Decoders: From Algorithms to Hardware ArchitecturesNo ratings yet
- Software Engineering for Embedded Systems: Methods, Practical Techniques, and ApplicationsFrom EverandSoftware Engineering for Embedded Systems: Methods, Practical Techniques, and ApplicationsRating: 2.5 out of 5 stars2.5/5 (2)
- Risk Assessment Guide 3Document3 pagesRisk Assessment Guide 3BaskyNo ratings yet
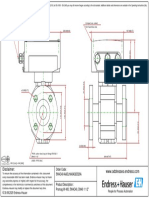
- 5W4C40 AADLHA0AQD320A Endress+HauserConsultAG 2DDrawing 09 30 2020Document1 page5W4C40 AADLHA0AQD320A Endress+HauserConsultAG 2DDrawing 09 30 2020BaskyNo ratings yet
- Working at Height Risk AssessmentDocument9 pagesWorking at Height Risk AssessmentBasky0% (1)
- BA DM 207 08 15 EN Dulcometer Compact PH Redox ENDocument108 pagesBA DM 207 08 15 EN Dulcometer Compact PH Redox ENBaskyNo ratings yet
- 5002 325 00GCB01 &etc010 006851 - R03Document36 pages5002 325 00GCB01 &etc010 006851 - R03BaskyNo ratings yet
- 8WA746 Datasheet enDocument3 pages8WA746 Datasheet enBaskyNo ratings yet
- Emotron vfx2 0 - Manual - 01 5326 01r1.enDocument222 pagesEmotron vfx2 0 - Manual - 01 5326 01r1.enBaskyNo ratings yet
- Catalog-Basket ScreenDocument2 pagesCatalog-Basket ScreenBaskyNo ratings yet
- 10W80 FC0A1AA0A4AA Endress+HauserConsultAG 2DDrawing 09 30 2020Document1 page10W80 FC0A1AA0A4AA Endress+HauserConsultAG 2DDrawing 09 30 2020BaskyNo ratings yet
- Risk Assessment Guide 1Document3 pagesRisk Assessment Guide 1BaskyNo ratings yet
- Star Delta DiagramDocument2 pagesStar Delta Diagramgarv84090% (10)
- Risk Assessment Guide 2Document5 pagesRisk Assessment Guide 2BaskyNo ratings yet
- Analysis of Continuous SignalsDocument113 pagesAnalysis of Continuous SignalsBaskyNo ratings yet
- Ee6801 Scad MSMDocument93 pagesEe6801 Scad MSMBasky100% (1)
- SS Question BankDocument6 pagesSS Question BankbinukirubaNo ratings yet
- Class Xii - Differntiation & Integration Formulae.Document1 pageClass Xii - Differntiation & Integration Formulae.Mandeep Singh Plaha59% (22)
- MP Lab ManualDocument32 pagesMP Lab ManualBaskyNo ratings yet
- Electric MotorsDocument10 pagesElectric MotorsBaskyNo ratings yet
- Ec 1Document25 pagesEc 1BaskyNo ratings yet
- EC6302 Digital Electronics 2 Marks With AnswersDocument18 pagesEC6302 Digital Electronics 2 Marks With AnswersBasky40% (5)
- Integration Formulas: 1. Common IntegralsDocument5 pagesIntegration Formulas: 1. Common IntegralssiegherrNo ratings yet
- I Sem - Curr & SyllDocument13 pagesI Sem - Curr & SyllAstronaut KennedyNo ratings yet
- CS2312 Lab ManualDocument43 pagesCS2312 Lab ManualBaskyNo ratings yet
- PH.D.M.S (By Research) Application July 2011Document5 pagesPH.D.M.S (By Research) Application July 2011BaskyNo ratings yet
- Ece R2013Document11 pagesEce R2013Henri DassNo ratings yet
- Me2255 Introduction To TransistorDocument12 pagesMe2255 Introduction To TransistorBaskyNo ratings yet
- Firstyear Online Submission Instructions InstallationDocument27 pagesFirstyear Online Submission Instructions InstallationBaskyNo ratings yet
- II Sem Mech Syllabus R2013Document11 pagesII Sem Mech Syllabus R2013Saravanan KumarNo ratings yet
- AU Regulation 2013 EEE PDFDocument12 pagesAU Regulation 2013 EEE PDFMuruga RajNo ratings yet
- CSE 2 2013R Anna UniversityDocument11 pagesCSE 2 2013R Anna UniversityBaskyNo ratings yet