You might also like
- Automotive Sensor Testing and Waveform AnalysisFrom EverandAutomotive Sensor Testing and Waveform AnalysisRating: 4.5 out of 5 stars4.5/5 (13)
- Warning & Alarming Instrument 5 & 6Document28 pagesWarning & Alarming Instrument 5 & 6VivekDhameliyaNo ratings yet
- 500,000 Extended Maintenance GuideDocument3 pages500,000 Extended Maintenance GuideHarry WeiNo ratings yet
- Ece R13Document161 pagesEce R13Anonymous O0T8aZZNo ratings yet
- EngineDocument23 pagesEngineVardaan ChauhanNo ratings yet
- MAS-2 Automotive Sensors and Actuators PDFDocument31 pagesMAS-2 Automotive Sensors and Actuators PDFPreet Parmar100% (3)
- 2019 G 3.3 Mpi Lambda IIDocument2 pages2019 G 3.3 Mpi Lambda IIDourado MartinsNo ratings yet
- 2015 Acura ILX 2.4L Eng BaseDocument107 pages2015 Acura ILX 2.4L Eng BasejuanNo ratings yet
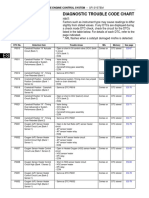
- Es 62 Es Diagnostic Trouble Code Chart PDFDocument10 pagesEs 62 Es Diagnostic Trouble Code Chart PDFSR BangashNo ratings yet
- 123doc He Thong Phanh AbsDocument24 pages123doc He Thong Phanh AbsĐức HòangNo ratings yet
- Santa Fe 2019 - 2.4 Gdi (TM)Document269 pagesSanta Fe 2019 - 2.4 Gdi (TM)chuongheo222No ratings yet
- Supplemental Restraint SystemsDocument25 pagesSupplemental Restraint SystemsMohamed MostafaNo ratings yet
- For Other Uses, See - "Motor" Redirects Here. For Other Uses, SeeDocument3 pagesFor Other Uses, See - "Motor" Redirects Here. For Other Uses, SeemanuelNo ratings yet
- Air Conditioner in The Motor Vehicle: Self-Study Programme 208Document37 pagesAir Conditioner in The Motor Vehicle: Self-Study Programme 208Cristian IfrimNo ratings yet
- Battery Check Sheet-ToyotaDocument1 pageBattery Check Sheet-ToyotaMortada AlsonniNo ratings yet
- 2010 Lincoln Town CarDocument11 pages2010 Lincoln Town Carusa_400450% (2)
- 2-Kia Oxygen Sensor Replacement DIYDocument9 pages2-Kia Oxygen Sensor Replacement DIYAnonymous OArHcompmcNo ratings yet
- 2011 - Mazda2 - General Information: Aim of DevelopmentDocument992 pages2011 - Mazda2 - General Information: Aim of DevelopmentKeiBry OFFICIAL TVNo ratings yet
- Co2 Weld Machine TroubleshootingDocument12 pagesCo2 Weld Machine TroubleshootingHemantNo ratings yet
- Energy Insight Yearbook 2018 - OnlineDocument84 pagesEnergy Insight Yearbook 2018 - OnlinemsNo ratings yet
- Than Cooling Parts: A/C Compressor Installation and Warranty RequirementsDocument24 pagesThan Cooling Parts: A/C Compressor Installation and Warranty RequirementsSPaul70% (1)
- Fully Automatic Air Condition-Ing Service! Bosch ACS 600, 601Document12 pagesFully Automatic Air Condition-Ing Service! Bosch ACS 600, 601ArturoCasimiroHuaman100% (3)
- As-T-T022 S11 Body Electric SystemDocument91 pagesAs-T-T022 S11 Body Electric SystemJunior Edder Aguilar Apolaya100% (1)
- Engine Intake & ExhaustDocument135 pagesEngine Intake & ExhaustRonan DexNo ratings yet
- Reparacion de Sensor Mass Air FlowDocument2 pagesReparacion de Sensor Mass Air FlowpepeladazoNo ratings yet
- Immobilizer CadenzaDocument68 pagesImmobilizer CadenzaElectronicdeivi DeiviNo ratings yet
- Proceedings BEMM-2018 FrancophoneDocument152 pagesProceedings BEMM-2018 FrancophoneIPCO AssistanteNo ratings yet
- Kona 2019 - G 2.0 GDIDocument212 pagesKona 2019 - G 2.0 GDINguyen Sy DucNo ratings yet
- 2011 G 3.5 Dohc-DiagramDocument7 pages2011 G 3.5 Dohc-DiagramDourado MartinsNo ratings yet
- Egine Control System: GeneralDocument18 pagesEgine Control System: GeneralAnh Tu NguyenNo ratings yet
- Lexus GS 350 2013 Wiring DiagramsDocument139 pagesLexus GS 350 2013 Wiring DiagramsMcDimaDNo ratings yet
- Electronic Stability Program (ESP) System W - o EPB - Schematic Diagrams (Antilock Brakes - Traction Control Systems) - ALLDATA RepairDocument5 pagesElectronic Stability Program (ESP) System W - o EPB - Schematic Diagrams (Antilock Brakes - Traction Control Systems) - ALLDATA Repairautel maxidasNo ratings yet
- Specifications: 2005 Hyundai Tiburon GT 2005 Hyundai Tiburon GTDocument234 pagesSpecifications: 2005 Hyundai Tiburon GT 2005 Hyundai Tiburon GTMaximiliano BrardaNo ratings yet
- 3.7 L Hummer h3t 4Document6 pages3.7 L Hummer h3t 4raul diazNo ratings yet
- Optima 2001 2.4L Service-ManualDocument917 pagesOptima 2001 2.4L Service-Manualmuhammad nidzwanNo ratings yet
- Electronic Control System PDFDocument48 pagesElectronic Control System PDFfaizal_hardijantoNo ratings yet
- MAS-1 Charging, Starting and Ignition Systems PDFDocument25 pagesMAS-1 Charging, Starting and Ignition Systems PDFmanojNo ratings yet
- 6 Passive Safety SystemsDocument57 pages6 Passive Safety SystemsEra BejtullahuNo ratings yet
- E - Theory/Operation - Efi: 1991 Mitsubishi MonteroDocument7 pagesE - Theory/Operation - Efi: 1991 Mitsubishi MonteroAnimemanuel MuñozNo ratings yet
- Auto Door LockDocument9 pagesAuto Door LockplgrodriguesNo ratings yet
- Vehicle MaintenanceDocument58 pagesVehicle Maintenancemarvin.antonie455No ratings yet
- SensorDocument25 pagesSensorlyndorNo ratings yet
- Course Outline Automatic TransmissionDocument2 pagesCourse Outline Automatic TransmissionHaftayNo ratings yet
- DI40Document1 pageDI40Erln LimaNo ratings yet
- Freelander 2: Maintenance Check Sheet A B Main Service (Vehicle Interior) A B Main Service (Under Vehicle)Document2 pagesFreelander 2: Maintenance Check Sheet A B Main Service (Vehicle Interior) A B Main Service (Under Vehicle)LuizHenriqueAraujoNo ratings yet
- Basic Car Air Conditioning: DENSO Europe BVDocument61 pagesBasic Car Air Conditioning: DENSO Europe BVHaroon GhaniNo ratings yet
- Heater, Air Conditioner and VentilationDocument36 pagesHeater, Air Conditioner and Ventilationmarran almarranyNo ratings yet
- GBDocument14 pagesGBBogdan Tiberiu Ciocanel100% (2)
- Dacia Logan Press Release Sept2005 EN PDFDocument14 pagesDacia Logan Press Release Sept2005 EN PDFDane GlusicaNo ratings yet
- Oxygen Sensors: Table of ContentDocument9 pagesOxygen Sensors: Table of ContentNicolas MonroyNo ratings yet
- AttachmentDocument18 pagesAttachmentabelaxoo046No ratings yet
- SensorsDocument6 pagesSensorsfarfarfifi3No ratings yet
- The Engine Management System For Gasoline EnginesDocument17 pagesThe Engine Management System For Gasoline EnginesUpendraChaudhariNo ratings yet
- Mechatronics Case StudyDocument7 pagesMechatronics Case Studyyogeesh_sharmaNo ratings yet
- Engine Control Unit Inputs & Outputs: By: Kamel ElsayedDocument28 pagesEngine Control Unit Inputs & Outputs: By: Kamel ElsayedHoo WaijianNo ratings yet
- Automotive Electronics: Prepared By: Jignesh ParmarDocument52 pagesAutomotive Electronics: Prepared By: Jignesh ParmarUtkarsh AnandNo ratings yet
- Paper 1Document6 pagesPaper 1MD HUZAIFA HANDURNo ratings yet
- How Does The Lambda Sensor WorkDocument24 pagesHow Does The Lambda Sensor WorkMoon boonbon100% (1)
- 6 Engine Computer Systems2Document36 pages6 Engine Computer Systems2Khairulz AnuarNo ratings yet
- Khushi Report2Document7 pagesKhushi Report2Khushi YadavNo ratings yet
- SPN - CPC - Fault CodesDocument7 pagesSPN - CPC - Fault Codesarelyyyta50% (2)
- Truck Trailer GuideDocument12 pagesTruck Trailer GuidePaulo AzañeroNo ratings yet
- BMW N47D20 EngineDocument4 pagesBMW N47D20 EngineCallum Smith100% (3)
- Technical Information Kalmar Intermodal Handler, DRF.: Reachstackers 40 - 45 TonnesDocument12 pagesTechnical Information Kalmar Intermodal Handler, DRF.: Reachstackers 40 - 45 TonnesBùi Văn ĐứcNo ratings yet
- ROCKS - Module - Statistics (Version 2.01)Document753 pagesROCKS - Module - Statistics (Version 2.01)jgiraolewisNo ratings yet
- Heavy Equipment (Construction) - Wikipedia, The Free EncyclopediaDocument7 pagesHeavy Equipment (Construction) - Wikipedia, The Free EncyclopediaXaythinanh Philama'No ratings yet
- ListDocument18 pagesListMichelle TampaNo ratings yet
- Fuel EX M.Y.17-19 Parts Quick ReferenceDocument7 pagesFuel EX M.Y.17-19 Parts Quick ReferenceAnonymous K1j3UJtiTNo ratings yet
- cpc4 Tier4 Eu6 Manual sw34 v1 0Document338 pagescpc4 Tier4 Eu6 Manual sw34 v1 0vlad100% (2)
- Manual de Partes Cargador 908Document491 pagesManual de Partes Cargador 908David Gallardo Guerra100% (1)
- 2005 RG Diesel SMDocument333 pages2005 RG Diesel SMMFNo ratings yet
- West Malaysia GVW TableDocument1 pageWest Malaysia GVW TableChia Sze KiatNo ratings yet
- AX 100cc PDFDocument149 pagesAX 100cc PDFwilliamNo ratings yet
- Códigos de Avería Genéricos y Específicos. Acceso GratuitoDocument4 pagesCódigos de Avería Genéricos y Específicos. Acceso Gratuitowilson orlando morales ospinaNo ratings yet
- Anti Collision DeviceDocument13 pagesAnti Collision DeviceManikant bhartiNo ratings yet
- Electronic Design FocusOnAutoCommunicationsEbook PDFDocument24 pagesElectronic Design FocusOnAutoCommunicationsEbook PDFhfalanizNo ratings yet
- 16 1963 CH-SpecificationsDocument8 pages16 1963 CH-SpecificationsJose LaproviteraNo ratings yet
- Fires in Vehicle-FIVE 2012 PDFDocument324 pagesFires in Vehicle-FIVE 2012 PDFmomoNo ratings yet
- Owners - Manual Smart PassionDocument226 pagesOwners - Manual Smart PassionBernardo RamirezNo ratings yet
- 1.0 BBD Analysis-Appendix-IDocument4 pages1.0 BBD Analysis-Appendix-IAshok Kumar RajanavarNo ratings yet
- MPWH - Manual On Traffic Control at Road Work ZonesDocument36 pagesMPWH - Manual On Traffic Control at Road Work ZonesMohammad SahmoudNo ratings yet
- The New BMW R 1200 RsDocument22 pagesThe New BMW R 1200 RsmattiaNo ratings yet
- Winches Mini Winch SMART Winch 500mDocument1 pageWinches Mini Winch SMART Winch 500mGogot Pantja ParijogoNo ratings yet
- Anti Lock Braking SystemDocument23 pagesAnti Lock Braking SystemManish BejNo ratings yet
- Agero Acronyms: Service AidDocument1 pageAgero Acronyms: Service AidJohnny GuzmanNo ratings yet
- Almera n16 Europa BRDocument74 pagesAlmera n16 Europa BRMARK llNo ratings yet
- E-Mobility Y: Opportunities & Challenges GDocument12 pagesE-Mobility Y: Opportunities & Challenges GdeipakguptaNo ratings yet
- CBLM Brake SystemDocument15 pagesCBLM Brake Systemace ebradoNo ratings yet
- Roadwidener Strassmayr BF 3Document2 pagesRoadwidener Strassmayr BF 3NGNo ratings yet
- Intersection Capacity UtilizationDocument116 pagesIntersection Capacity Utilizationjoshechata80% (5)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Well Integrity for Workovers and RecompletionsFrom EverandWell Integrity for Workovers and RecompletionsRating: 5 out of 5 stars5/5 (3)
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingFrom EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingNo ratings yet
- Electric Motors and Drives: Fundamentals, Types and ApplicationsFrom EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsRating: 4.5 out of 5 stars4.5/5 (12)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- Thermal Power Plant: Design and OperationFrom EverandThermal Power Plant: Design and OperationRating: 4.5 out of 5 stars4.5/5 (23)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Photovoltaic Solar Energy: From Fundamentals to ApplicationsFrom EverandPhotovoltaic Solar Energy: From Fundamentals to ApplicationsNo ratings yet
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AFrom EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANo ratings yet
- Heat Transfer Engineering: Fundamentals and TechniquesFrom EverandHeat Transfer Engineering: Fundamentals and TechniquesRating: 4 out of 5 stars4/5 (1)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsFrom EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsNo ratings yet
- Pipeline and Energy Plant Piping: Design and TechnologyFrom EverandPipeline and Energy Plant Piping: Design and TechnologyRating: 5 out of 5 stars5/5 (2)