You might also like
- Fuji Starting Guide G11S-LE2 - Lift - 7Document54 pagesFuji Starting Guide G11S-LE2 - Lift - 7Nguyen Anh Tu100% (3)
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- DEMAGDocument88 pagesDEMAGPajserchina88% (8)
- Manual How To Repair RefrigeratorDocument150 pagesManual How To Repair Refrigeratoraturcubb100% (5)
- Experiment No. 5 Diode Approximation: Abstract - Bridges Are Unarguably One Key Components of TheDocument3 pagesExperiment No. 5 Diode Approximation: Abstract - Bridges Are Unarguably One Key Components of TheJohn Kenneth BulabosNo ratings yet
- DC Motor Control ReportDocument21 pagesDC Motor Control ReportNishant SinghNo ratings yet
- Interleaved DC-DC Boost Converter With Built-In MPPT AlgorithmDocument18 pagesInterleaved DC-DC Boost Converter With Built-In MPPT AlgorithmAnudeep ReddyNo ratings yet
- Green Mode PWM Controller Ap384XgDocument13 pagesGreen Mode PWM Controller Ap384XgbaphometabaddonNo ratings yet
- Uc3842 Monitor Power Supply Regulator IcDocument7 pagesUc3842 Monitor Power Supply Regulator IcJoseph Sidhom SnadaNo ratings yet
- Current Mode PWM Controller: Features DescriptionDocument9 pagesCurrent Mode PWM Controller: Features DescriptionJozo ĆurčićNo ratings yet
- Fan 7316Document21 pagesFan 7316sontuyet82No ratings yet
- Circuito Integrado Tle6368Document58 pagesCircuito Integrado Tle6368Angy GiraldoNo ratings yet
- Circuit Drawing of Stepper Motor ControllerDocument24 pagesCircuit Drawing of Stepper Motor Controlleranon-814167100% (5)
- Chapter 5 Stepper MOTOR PracticalDocument16 pagesChapter 5 Stepper MOTOR PracticalmfmprofNo ratings yet
- Spaj 140CDocument68 pagesSpaj 140CTiago Marques PereiraNo ratings yet
- Dla001d L6599DDocument36 pagesDla001d L6599DBRIGHT_SPARK50% (6)
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 8Document19 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 8Tomás BurónNo ratings yet
- LCD Monitor Technical TrainingDocument28 pagesLCD Monitor Technical TrainingAleksander AlexanderNo ratings yet
- L 6599 DDocument36 pagesL 6599 DVidal VelasquezNo ratings yet
- Spaj 140 C Overcurrent and Earth-Fault Relay: User S Manual and Technical DescriptionDocument68 pagesSpaj 140 C Overcurrent and Earth-Fault Relay: User S Manual and Technical Descriptionvijayasiva86No ratings yet
- 555 TimerDocument3 pages555 TimerPraveen KumarNo ratings yet
- Feature General Description: HT7A6005 Low Power, Wide Temperature Range General Purpose Current Mode PWM ControllerDocument11 pagesFeature General Description: HT7A6005 Low Power, Wide Temperature Range General Purpose Current Mode PWM ControllerEnéas BaroneNo ratings yet
- Datasheet PDFDocument10 pagesDatasheet PDFcomplex72No ratings yet
- IC 3842 para FonteDocument8 pagesIC 3842 para FonteTomNedscNo ratings yet
- SLG8SP513VDocument23 pagesSLG8SP513VZikma EncisoNo ratings yet
- L6565Document18 pagesL6565Sergio Daniel BarretoNo ratings yet
- Summary ClockDocument39 pagesSummary ClockmikcomiNo ratings yet
- Uc 3845Document23 pagesUc 3845Bahram RN100% (1)
- Fan 7314Document14 pagesFan 7314Kamal NonekNo ratings yet
- Data SheetDocument6 pagesData SheetΠΑΝΑΓΙΩΤΗΣΠΑΝΑΓΟΣNo ratings yet
- LB 1845Document7 pagesLB 1845Nacer MezghicheNo ratings yet
- Improved High-Voltage Resonant Controller: FeaturesDocument31 pagesImproved High-Voltage Resonant Controller: Featuressontuyet82No ratings yet
- 16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerDocument12 pages16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerLauderi MartinsNo ratings yet
- CCFL Inverter IC OZ960Document12 pagesCCFL Inverter IC OZ960davesworkshopNo ratings yet
- Oscilator 555 With FormulasDocument4 pagesOscilator 555 With FormulasmanuNo ratings yet
- Em 78Document55 pagesEm 78Mio Q MioNo ratings yet
- An 1138Document18 pagesAn 1138Marco Tulio Da SilvaNo ratings yet
- Single Ended Active Clamp/Reset PWM: Features DescriptionDocument16 pagesSingle Ended Active Clamp/Reset PWM: Features Descriptioncatsoithahuong84No ratings yet
- WT7514 PDFDocument9 pagesWT7514 PDFle5100kwNo ratings yet
- TEA1532BT TEA1532CT: 1. General DescriptionDocument23 pagesTEA1532BT TEA1532CT: 1. General Descriptiondstoic1No ratings yet
- UC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerDocument16 pagesUC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerCortés BernaNo ratings yet
- UC3845ANDocument15 pagesUC3845ANMiloud ChouguiNo ratings yet
- DM74LS73A Dual Negative-Edge-Triggered Master-Slave J-K Flip-Flops With Clear and Complementary OutputsDocument6 pagesDM74LS73A Dual Negative-Edge-Triggered Master-Slave J-K Flip-Flops With Clear and Complementary OutputssoulchordsNo ratings yet
- L4949Document11 pagesL4949Николай КръстевNo ratings yet
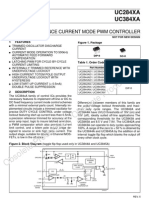
- Uc284xa Uc384xaDocument16 pagesUc284xa Uc384xayusufwpNo ratings yet
- Color Monitor: Service ManualDocument35 pagesColor Monitor: Service ManualReparatii Calculatoare TimisoaraNo ratings yet
- What Is The 555 Timer?: Philips Components and Semiconductors AustraliaDocument15 pagesWhat Is The 555 Timer?: Philips Components and Semiconductors AustraliaLorena RabinoNo ratings yet
- Datasheet sg6105dDocument13 pagesDatasheet sg6105dCartman SantosNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- ADU4518R9v06: Antenna SpecificationsDocument2 pagesADU4518R9v06: Antenna SpecificationsNatalya Drugakova0% (1)
- FMDS0504 0713 Transformers PDFDocument41 pagesFMDS0504 0713 Transformers PDFOrlando E Cabrera RojasNo ratings yet
- Ba6286 N Ci Drive de Motor 1a 15 VoltiosDocument8 pagesBa6286 N Ci Drive de Motor 1a 15 VoltiosMiguel Angel Medina MezaNo ratings yet
- Siemen HJD63B400Document4 pagesSiemen HJD63B400ap00No ratings yet
- Derivation 3.1 Energy Conservation - Magnetic Field Cannot Change ParticleDocument12 pagesDerivation 3.1 Energy Conservation - Magnetic Field Cannot Change ParticleRoy VeseyNo ratings yet
- Ieee Recommended Practice For Testing Insulation Resistance of RDocument27 pagesIeee Recommended Practice For Testing Insulation Resistance of RDavid Omar Torres GutierrezNo ratings yet
- Understanding The Fire Hazards of Photovoltaic Systems: Tech TalkDocument7 pagesUnderstanding The Fire Hazards of Photovoltaic Systems: Tech Talkgerrzen64No ratings yet
- Falcon Series WebDocument24 pagesFalcon Series WebGratifying SoulNo ratings yet
- Charles Sweetser XFMR TestingDocument27 pagesCharles Sweetser XFMR Testingmajesus100% (1)
- Gutor PXC: InstallationDocument52 pagesGutor PXC: Installationiwan pNo ratings yet
- Loss of MainsDocument26 pagesLoss of MainsththeeNo ratings yet
- 555 Timer ICDocument4 pages555 Timer ICtajju_121No ratings yet
- Service Manual For Sorvall Cryofuge 5500i Sorvall Rc4-EnglishDocument90 pagesService Manual For Sorvall Cryofuge 5500i Sorvall Rc4-EnglishBhavesh JoshiNo ratings yet
- Wiring and Installation GuidelinesDocument94 pagesWiring and Installation GuidelinesyousnailNo ratings yet
- Magnetic Design of A Flux Leakage Assembly For PipesDocument6 pagesMagnetic Design of A Flux Leakage Assembly For PipesPDDELUCA100% (1)
- Load Profile SolokuroDocument66 pagesLoad Profile Solokurorelay 20kvNo ratings yet
- LM5109B High Voltage 1-A Peak Half-Bridge Gate Driver: 1 Features 3 DescriptionDocument29 pagesLM5109B High Voltage 1-A Peak Half-Bridge Gate Driver: 1 Features 3 DescriptionDaniel JiménezNo ratings yet
- Types of Starters in Three Phase Induction Motor: ANSWER: A. MaximumDocument3 pagesTypes of Starters in Three Phase Induction Motor: ANSWER: A. Maximumपंकज काळेNo ratings yet
- CabluDocument3 pagesCabluAlexandru AritonNo ratings yet
- Samsung Max-N50 52 53 54 55 57 PDFDocument63 pagesSamsung Max-N50 52 53 54 55 57 PDFMAULIDA CHANEL100% (1)
- Electropneumatic Converter For Direct Current Signals I/p Converter Type 3913-0001Document4 pagesElectropneumatic Converter For Direct Current Signals I/p Converter Type 3913-0001Charles Louie LibronNo ratings yet
- Molicel P42aDocument1 pageMolicel P42aAlexandru Mihai TomaNo ratings yet
- LedDocument10 pagesLedAnonymous D4V2qkNo ratings yet
- Leeson Full Product CatalogDocument500 pagesLeeson Full Product Catalogkontejner14100% (1)
- Gottlieb Black Hole Instruction ManualDocument53 pagesGottlieb Black Hole Instruction ManualTatooinesky100% (2)
- FM Transmitter DesignDocument5 pagesFM Transmitter DesignLaty Bayb100% (2)
- KSSM Light WavesDocument24 pagesKSSM Light WavesAini OthmanNo ratings yet