You might also like
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsFrom EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsNo ratings yet
- Multi-Camera Networks: Principles and ApplicationsFrom EverandMulti-Camera Networks: Principles and ApplicationsHamid AghajanRating: 3 out of 5 stars3/5 (1)
- Substation DesignDocument764 pagesSubstation Designprashious100% (2)
- Electrical SubstationDocument221 pagesElectrical SubstationMohammedSaadaniHassani91% (11)
- Wireline PCE PDFDocument56 pagesWireline PCE PDFMuhammad ShahrukhNo ratings yet
- 2011 Barnes Bullet ChartDocument2 pages2011 Barnes Bullet ChartMario LopezNo ratings yet
- Taipei 101Document19 pagesTaipei 101Shikha VermaNo ratings yet
- Coin Based Solar Mobile Charger: Aparna D. PawarDocument4 pagesCoin Based Solar Mobile Charger: Aparna D. PawarerpublicationNo ratings yet
- IJETR032148 With Cover Page v2Document5 pagesIJETR032148 With Cover Page v2U20EE047 RATHOD CHINTAN SVNITNo ratings yet
- Web Based Telematics Application For Robotics: A Project ReportDocument52 pagesWeb Based Telematics Application For Robotics: A Project ReportpamiparminderNo ratings yet
- Schneider Electric - Electronic Trip Circuit Breaker BasicsDocument20 pagesSchneider Electric - Electronic Trip Circuit Breaker BasicsJohn100% (3)
- Application Notes 8Document13 pagesApplication Notes 8Sushma BiradarNo ratings yet
- Design and Development of Robotic Arm For Cutting TreeDocument10 pagesDesign and Development of Robotic Arm For Cutting TreeMarko IvanovicNo ratings yet
- Class 1 Systems 2010Document12 pagesClass 1 Systems 2010ivan salinas lazoNo ratings yet
- Robotic Cable InspctionDocument8 pagesRobotic Cable Inspctiongezu gebeyehuNo ratings yet
- Actuator Design Trends For Functional Safety Systems in Electric and Autonomous VehiclesDocument6 pagesActuator Design Trends For Functional Safety Systems in Electric and Autonomous VehiclesNguyễn Hữu TàiNo ratings yet
- Unit 1Document43 pagesUnit 1venkatachalamNo ratings yet
- ScienceDocument5 pagesScienceNaveedNo ratings yet
- Speaking Swarmish: Human-Robot Interface Design For Large Swarms of Autonomous Mobile RobotsDocument4 pagesSpeaking Swarmish: Human-Robot Interface Design For Large Swarms of Autonomous Mobile RobotsArunNo ratings yet
- Crank SpecificationDocument6 pagesCrank SpecificationmarkvillaplazaNo ratings yet
- Home Automation With Coding CDocument48 pagesHome Automation With Coding CSaurav TiwariNo ratings yet
- Near Field Immunity Cartography Method To Characterize An IC To Fields Radiated by An ESDDocument6 pagesNear Field Immunity Cartography Method To Characterize An IC To Fields Radiated by An ESDhwa6jin6choiNo ratings yet
- Latest TechnologiesDocument6 pagesLatest TechnologiesTushar LanjekarNo ratings yet
- PC Regimented Defense Android Using Zigbee: Dandu Gowthami, V.V.G.S.Rajendra PrasadDocument4 pagesPC Regimented Defense Android Using Zigbee: Dandu Gowthami, V.V.G.S.Rajendra PrasadRam BadhuNo ratings yet
- Efuse Chip MorphingDocument3 pagesEfuse Chip MorphingAnsuman Sahoo100% (3)
- Atom Electrosurgical SystemDocument40 pagesAtom Electrosurgical SystemOgut AjaNo ratings yet
- Speed Checker For Rash DrivingDocument68 pagesSpeed Checker For Rash DrivingDebashishParida100% (1)
- Train Accident Prevention Control by Multi Core Embedded ProcessorDocument4 pagesTrain Accident Prevention Control by Multi Core Embedded ProcessorerpublicationNo ratings yet
- Automatic Vehicle Washing System Using Programmable Logic ControllerDocument4 pagesAutomatic Vehicle Washing System Using Programmable Logic ControllerGhilman HabibNo ratings yet
- Medina Santiago2014Document7 pagesMedina Santiago2014ricardo zegarraNo ratings yet
- VisualizationandanimationDocument6 pagesVisualizationandanimationapi-3805241No ratings yet
- Design of Distribution System Based On Multi Agent Systems: AbstractDocument4 pagesDesign of Distribution System Based On Multi Agent Systems: AbstractInternational Journal of Engineering and TechniquesNo ratings yet
- D S E U P S S P C: Esign of A Mart Mbedded Ninterrupted Ower Upply Ystem For Ersonal OmputersDocument20 pagesD S E U P S S P C: Esign of A Mart Mbedded Ninterrupted Ower Upply Ystem For Ersonal OmputersAli KhaniNo ratings yet
- .Underground Cable Fault Detection Using ArduinoDocument4 pages.Underground Cable Fault Detection Using ArduinoHarshal PatilNo ratings yet
- Infrared Laser Security: J. Matt Casson Eric Gitt Les KimmelDocument9 pagesInfrared Laser Security: J. Matt Casson Eric Gitt Les KimmelGlydell DominguezNo ratings yet
- BeautyDocument41 pagesBeautynavyNo ratings yet
- Substation Automation Using IEC 61850 StandardDocument5 pagesSubstation Automation Using IEC 61850 Standardkaka_tpNo ratings yet
- 1-CC-Link IE TSN Na EngDocument71 pages1-CC-Link IE TSN Na EngThanh Kieu Nguyen ThiNo ratings yet
- A Wireless Quiz System Using Low Power Microcontrollers: April 2010Document5 pagesA Wireless Quiz System Using Low Power Microcontrollers: April 2010Nayome Devapriya AngaNo ratings yet
- Solar Light Energy ProjectDocument90 pagesSolar Light Energy ProjectAdilNo ratings yet
- PDF To WordDocument13 pagesPDF To WordAjay Kumar0% (1)
- Autonomous Underwater Biorobots A Wireless System For Power TransferDocument7 pagesAutonomous Underwater Biorobots A Wireless System For Power TransfermarwanNo ratings yet
- Elecsolve User GuideDocument56 pagesElecsolve User GuideJorge Luis HernándezNo ratings yet
- Mini Project Report On: Home AutomationDocument73 pagesMini Project Report On: Home AutomationTeja RaghuNo ratings yet
- Robot TeleDocument5 pagesRobot TeleadityachukkaNo ratings yet
- Hybrid Vehicle Measurement Safety Basics:: Taking High-Voltage ReadingsDocument3 pagesHybrid Vehicle Measurement Safety Basics:: Taking High-Voltage ReadingsNuno MaiaNo ratings yet
- Ponencia 2010 Andescon AvionicsDocument5 pagesPonencia 2010 Andescon AvionicsAndrés CeverisaeNo ratings yet
- Documents - Tips Ultrasonic Navigation For Blind With Audio Interface DocumentationDocument83 pagesDocuments - Tips Ultrasonic Navigation For Blind With Audio Interface DocumentationVishal ChristopherNo ratings yet
- Cable FaultDocument103 pagesCable FaultshaikintiyazsultanaNo ratings yet
- D H A C R: Igital Uman Ction Opying ObotDocument7 pagesD H A C R: Igital Uman Ction Opying ObotMaitriya DamaniNo ratings yet
- Voltage and Frequency Based Control of Induction Motor Using Advance Voice and Command SystemDocument4 pagesVoltage and Frequency Based Control of Induction Motor Using Advance Voice and Command SystemedfsazagNo ratings yet
- Swarm DocumentationDocument43 pagesSwarm DocumentationManishaNo ratings yet
- A Project Report On Bridge RectifierDocument44 pagesA Project Report On Bridge RectifierVasu ThakurNo ratings yet
- NCETSEM03Document5 pagesNCETSEM03Deepu ShellgiNo ratings yet
- Control Drone InformeDocument4 pagesControl Drone InformeLaura PrietoNo ratings yet
- Chip Morphing Technology: IntroductionDocument4 pagesChip Morphing Technology: IntroductionAnsuman SahooNo ratings yet
- TrainND EV Program MaterialDocument11 pagesTrainND EV Program MaterialducphamthuaNo ratings yet
- TUP13003Document3 pagesTUP13003Amr HendyNo ratings yet
- Cable Fault Detection Using Iot: International Research Journal of Engineering and Technology (Irjet)Document4 pagesCable Fault Detection Using Iot: International Research Journal of Engineering and Technology (Irjet)Ravindra GujarNo ratings yet
- 532 540 PB PDFDocument7 pages532 540 PB PDFvijaya kakaniNo ratings yet
- Ethernet Manual: How To Set Up An Ethernet NetworkDocument18 pagesEthernet Manual: How To Set Up An Ethernet NetworkJayamuruganNo ratings yet
- AUTOMATIONDocument5 pagesAUTOMATIONmiguel rojas tonuscoNo ratings yet
- Toward Controlled Flight of The Ionocraft A Flying Microrobot Using Electrohydrodynamic Thrust With Onboard Sensing and No Moving PartsDocument7 pagesToward Controlled Flight of The Ionocraft A Flying Microrobot Using Electrohydrodynamic Thrust With Onboard Sensing and No Moving PartsFrank ToralbaNo ratings yet
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsFrom EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsRating: 3 out of 5 stars3/5 (1)
- MicrocontrollerDocument128 pagesMicrocontrollerRavi KiranNo ratings yet
- Skin Response CircuitDocument1 pageSkin Response Circuiturbikash081266No ratings yet
- Rom, Eprom, and Eeprom TechnologyDocument15 pagesRom, Eprom, and Eeprom TechnologytoloykhanNo ratings yet
- DC To DC ConversionDocument8 pagesDC To DC ConversionMichael-Denis NeculaNo ratings yet
- MattMaupin FreescaleSemiconductorDocument32 pagesMattMaupin FreescaleSemiconductorKiran KumarNo ratings yet
- Type The Document SubtitleDocument83 pagesType The Document SubtitleARVINDNo ratings yet
- MicrocontrollerDocument128 pagesMicrocontrollerRavi KiranNo ratings yet
- Capacitor Bank ProtectionDocument17 pagesCapacitor Bank ProtectionskisakNo ratings yet
- Reactive Power Compensation Using Capacitor BanksDocument16 pagesReactive Power Compensation Using Capacitor BanksARVIND100% (1)
- Zigebee: Arvind KumarDocument41 pagesZigebee: Arvind KumarARVINDNo ratings yet
- Broadband Over Power LineDocument24 pagesBroadband Over Power LineARVINDNo ratings yet
- Pro2 11Document1 pagePro2 11ARVINDNo ratings yet
- Protection of Transmission Lines Using Series Compensation CapacitorsDocument5 pagesProtection of Transmission Lines Using Series Compensation CapacitorskittleboyNo ratings yet
- Reactive Power CompensationDocument12 pagesReactive Power CompensationSyed Muhammad Munavvar Hussain100% (5)
- Reactive Power Compensation Using Capacitor BanksDocument82 pagesReactive Power Compensation Using Capacitor BanksARVIND100% (1)
- Capacitor Bank ProtectionDocument17 pagesCapacitor Bank ProtectionskisakNo ratings yet
- Article 3: What Is Reactive Power?Document8 pagesArticle 3: What Is Reactive Power?MAT JIBRUDNo ratings yet
- Centralised Reactive Power CompensationDocument6 pagesCentralised Reactive Power CompensationHans De Keulenaer100% (1)
- Power Factor and Reactive Power: 2 FT X 5 LB 10 FT-LB 0.0000038 KWH 0.0033 "Calories"Document25 pagesPower Factor and Reactive Power: 2 FT X 5 LB 10 FT-LB 0.0000038 KWH 0.0033 "Calories"ARVINDNo ratings yet
- Capacitors For Power Factor CorrectionDocument15 pagesCapacitors For Power Factor Correctionmessallam100% (1)
- Fuel Energizer 1Document25 pagesFuel Energizer 1mishramanish044705100% (4)
- Date: 17/7/2008: RLC Response of Step InputDocument32 pagesDate: 17/7/2008: RLC Response of Step InputARVINDNo ratings yet
- Control SystemDocument36 pagesControl SystemARVINDNo ratings yet
- 3 Reactive ServicesDocument12 pages3 Reactive ServicesARVINDNo ratings yet
- Simulation LabDocument17 pagesSimulation LabARVINDNo ratings yet
- Electrical Circuits and Simulation Lab: List of Experiment SDocument53 pagesElectrical Circuits and Simulation Lab: List of Experiment SARVIND100% (1)
- Single Phase Ac VoltageDocument4 pagesSingle Phase Ac VoltageARVINDNo ratings yet
- Irfp 4368 PBFDocument8 pagesIrfp 4368 PBFarcatusNo ratings yet
- Diagnostic Test in Science 8Document9 pagesDiagnostic Test in Science 8Mylene BalanquitNo ratings yet
- STMicroelectronics PCN NFME TO247Document9 pagesSTMicroelectronics PCN NFME TO247wilson sanchezNo ratings yet
- Respon KognitifDocument123 pagesRespon KognitifSyaeful GunawanNo ratings yet
- Data FusionDocument3 pagesData FusionAnonymous 2lMI3jbZbNo ratings yet
- Conceptual Database DesignDocument22 pagesConceptual Database DesignMunNo ratings yet
- Tm1 Messageloganalysis enDocument8 pagesTm1 Messageloganalysis en'SudarshanRaiNo ratings yet
- Solving Exponential Equations: Contextualized Learner Resource in General Mathematics 11Document14 pagesSolving Exponential Equations: Contextualized Learner Resource in General Mathematics 11Gerby Godinez100% (1)
- Erle Robotics CPP GitbookDocument122 pagesErle Robotics CPP GitbookkolosuxNo ratings yet
- It 1352-Cryptography and Network Security Question PaperDocument2 pagesIt 1352-Cryptography and Network Security Question Paper11dreamerNo ratings yet
- Stock Price Movements Classification Using Machine and Deep Learning Techniques-The Case Study of Indian Stock MarketDocument8 pagesStock Price Movements Classification Using Machine and Deep Learning Techniques-The Case Study of Indian Stock MarketAlexandre RezendeNo ratings yet
- 6 STD Text Book Part 2Document112 pages6 STD Text Book Part 2Parthasarathy SeshadriNo ratings yet
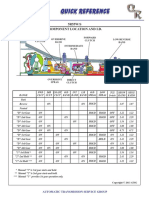
- Quick Reference: 5R55W/S Component Location and I.DDocument7 pagesQuick Reference: 5R55W/S Component Location and I.DAyhan Ümit100% (3)
- Ex8 14Document2 pagesEx8 14nagesha_basappa865No ratings yet
- Ayerigrammar 20181001Document480 pagesAyerigrammar 20181001OnusMusic BoersNo ratings yet
- Assignment #3 InventoryDocument13 pagesAssignment #3 InventoryAnkit SainiNo ratings yet
- S7500 Troubleshooting PDFDocument53 pagesS7500 Troubleshooting PDFDaniel CekulNo ratings yet
- Flushing Oil Flooded Rotary Screw Air Compressors Procedure enDocument2 pagesFlushing Oil Flooded Rotary Screw Air Compressors Procedure enSergiSerrano100% (1)
- Umis 1268 1658060121Document8 pagesUmis 1268 1658060121shakirNo ratings yet
- Water Cooling Coils PDFDocument20 pagesWater Cooling Coils PDFFrancisNo ratings yet
- 1214 1Document2 pages1214 1AvismanangNo ratings yet
- MATH 545, Stochastic Calculus Problem Set 2: January 24, 2019Document7 pagesMATH 545, Stochastic Calculus Problem Set 2: January 24, 2019patriciaNo ratings yet
- Mastering PHP 7Document7 pagesMastering PHP 7timi_pek33% (3)
- 03 Handout 1Document7 pages03 Handout 1Adrasteia ZachryNo ratings yet
- Convertisseur Interface Manageable X21 V35 E1 E1 Loop E1500 2sDocument5 pagesConvertisseur Interface Manageable X21 V35 E1 E1 Loop E1500 2sgaryelingenieroNo ratings yet
- Development of Electroless Ni P Coatings On Sisal FiberDocument4 pagesDevelopment of Electroless Ni P Coatings On Sisal FiberHemachandranNo ratings yet
- Sim CCDocument8 pagesSim CCLivya GeorgeNo ratings yet