You might also like
- Domestic Electrical Installation PDFDocument90 pagesDomestic Electrical Installation PDFHenok Ayele93% (28)
- Final Paul BourgadeDocument2 pagesFinal Paul BourgadeaqszaqszNo ratings yet
- DemostracionesDocument20 pagesDemostracionesEstefanyRojasNo ratings yet
- Lecture 26: Brownian Motion: X X X X X X X X X X XDocument5 pagesLecture 26: Brownian Motion: X X X X X X X X X X XspitzersglareNo ratings yet
- Lecture 28: Brownian Bridge: t t (δ) a t −2δD −2δD −2δa t t −2δD t∧TDocument4 pagesLecture 28: Brownian Bridge: t t (δ) a t −2δD −2δD −2δa t t −2δD t∧TspitzersglareNo ratings yet
- Fourier Series and Fourier Transforms: EECS2 (6.082), MIT Fall 2006 Lectures 2 and 3Document18 pagesFourier Series and Fourier Transforms: EECS2 (6.082), MIT Fall 2006 Lectures 2 and 3Uzmah JavedNo ratings yet
- Practica 8Document36 pagesPractica 8Alexander Lozano CernaNo ratings yet
- Ornstein-Uhlenbeck Processes and ExtensionsDocument16 pagesOrnstein-Uhlenbeck Processes and ExtensionsMatt LorigNo ratings yet
- Partial Differential Equations Handout: 1 Boundary-Value ProblemsDocument28 pagesPartial Differential Equations Handout: 1 Boundary-Value Problemsmohinuddin12456No ratings yet
- Para CirclesDocument1 pagePara CirclesteachopensourceNo ratings yet
- Mathematical TriposDocument7 pagesMathematical TriposKaustubhNo ratings yet
- 6.mites2010 Solution2Document14 pages6.mites2010 Solution2Catherine WhitewoodNo ratings yet
- DSP4 Fourier Series - UnlockedDocument46 pagesDSP4 Fourier Series - UnlockedluisperikoNo ratings yet
- 2019 Hattendorf Theorem-2Document2 pages2019 Hattendorf Theorem-2hanNo ratings yet
- Ejercicio 2.6Document2 pagesEjercicio 2.6HpA SaúlNo ratings yet
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremBhuvan Susheel MekaNo ratings yet
- Lec 5Document3 pagesLec 5Atom CarbonNo ratings yet
- Ordinary Differential EquationsDocument15 pagesOrdinary Differential EquationsJessNo ratings yet
- The Implied Volatility of Forward Starting Options: ATM Short-Time Level, Skew and CurvatureDocument21 pagesThe Implied Volatility of Forward Starting Options: ATM Short-Time Level, Skew and CurvatureAnonymous 5mSMeP2jNo ratings yet
- GW9 SolutionsDocument3 pagesGW9 Solutionswangshiui2002No ratings yet
- ENEE 660 HW Sol #3Document13 pagesENEE 660 HW Sol #3PeacefulLion100% (1)
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremKirubasri SNo ratings yet
- Problem 2.35 PDFDocument3 pagesProblem 2.35 PDFKauê BrittoNo ratings yet
- IEOR 4701 Introduction to Stochastic CalculusDocument10 pagesIEOR 4701 Introduction to Stochastic CalculusChevy TeoNo ratings yet
- 2 Brownian Motion: T T T T TDocument4 pages2 Brownian Motion: T T T T TwillNo ratings yet
- Brownian Motion and SDE PDFDocument38 pagesBrownian Motion and SDE PDFJames DunkelfelderNo ratings yet
- Brownian Motion and Itô Calculus: 8.1 Definition, Construction and PropertiesDocument12 pagesBrownian Motion and Itô Calculus: 8.1 Definition, Construction and PropertiesArturo ZamudioNo ratings yet
- Bs MldlaDocument35 pagesBs MldlaRoshan KumarNo ratings yet
- PDE Soln Char CurvesDocument34 pagesPDE Soln Char CurvesmariaNo ratings yet
- 1 s2.0 S1877050914003718 MainDocument9 pages1 s2.0 S1877050914003718 MainMuhammad nawazNo ratings yet
- TD3 Grebenkov 2022Document6 pagesTD3 Grebenkov 2022Kathérine JosephNo ratings yet
- Classical Least Squares TheoryDocument35 pagesClassical Least Squares TheoryAnonymous tsTtieMHDNo ratings yet
- Problem Set1 SolnsDocument3 pagesProblem Set1 SolnsIpsita MandalNo ratings yet
- example4Document3 pagesexample4Gonzalo SaavedraNo ratings yet
- m257 316 Assigment5 12 Supplementary Problems SolutionsDocument9 pagesm257 316 Assigment5 12 Supplementary Problems SolutionsSanchez DavidNo ratings yet
- Stochastic Calculus and ApplicationsDocument4 pagesStochastic Calculus and Applicationselihu anastacioNo ratings yet
- Exercise 5.3 Solution GuideDocument11 pagesExercise 5.3 Solution GuideEstefanyRojasNo ratings yet
- Lecture 20: (Physical) Brownian Motion: 1 Overview and Simple ModelsDocument7 pagesLecture 20: (Physical) Brownian Motion: 1 Overview and Simple ModelsSnigdha SharmaNo ratings yet
- Calculus I Trig Derivatives Mass VibrationDocument2 pagesCalculus I Trig Derivatives Mass VibrationJeanny Mae PesebreNo ratings yet
- Brownian Motion: A TutorialDocument40 pagesBrownian Motion: A TutorialplantorNo ratings yet
- Analytic Solutions of a Two-Dimensional Rectangular Heat EquationDocument5 pagesAnalytic Solutions of a Two-Dimensional Rectangular Heat Equationreff1694No ratings yet
- Probset Answer SheetDocument4 pagesProbset Answer SheetPrincess Niña B. PedrosoNo ratings yet
- Quantum PropagatorsDocument3 pagesQuantum PropagatorsLorenzzoVictorNo ratings yet
- Bariscrotone (Jennyfer) PDFDocument23 pagesBariscrotone (Jennyfer) PDFJulian David Henao EscobarNo ratings yet
- Quiz03 SolDocument4 pagesQuiz03 SolJackson WangNo ratings yet
- Brownian Motion and Stochastic CalculusDocument36 pagesBrownian Motion and Stochastic CalculusmuralimoviesNo ratings yet
- Tutorial On Stochastic Differential EquationsDocument38 pagesTutorial On Stochastic Differential Equationsmariuccio254100% (1)
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremDebashis TaraiNo ratings yet
- 18.S096 Problem Set Fall 2013: Stochastic CalculusDocument3 pages18.S096 Problem Set Fall 2013: Stochastic CalculusGagik AtabekyanNo ratings yet
- 1 IEOR 4700: Notes On Brownian Motion: 1.1 Normal DistributionDocument11 pages1 IEOR 4700: Notes On Brownian Motion: 1.1 Normal DistributionshrutigarodiaNo ratings yet
- 1 HJB: The Stochastic Case: 1.1 Brownian MotionDocument10 pages1 HJB: The Stochastic Case: 1.1 Brownian Motionfatcode27No ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- Probset 2Document5 pagesProbset 2Princess Niña B. PedrosoNo ratings yet
- Damped Vibration: Viscous and Coulomb DampingDocument14 pagesDamped Vibration: Viscous and Coulomb DampingEmmanuel KutaniNo ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- Solutions HW 3Document9 pagesSolutions HW 3Abcd EfghNo ratings yet
- Something That Is Not in The Book: Separation of Variables: Andr e Ran Vrije Universiteit AmsterdamDocument10 pagesSomething That Is Not in The Book: Separation of Variables: Andr e Ran Vrije Universiteit AmsterdamMaria SattarNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Ngwenyama Lee 1997Document25 pagesNgwenyama Lee 1997patriciaNo ratings yet
- DR AsadulDocument12 pagesDR AsadulpatriciaNo ratings yet
- Strategic Analysis TemplateDocument17 pagesStrategic Analysis TemplatepatriciaNo ratings yet
- Vanesch BusinessTheoryDocument31 pagesVanesch BusinessTheorypatriciaNo ratings yet
- Dimensional Analysis for Fluid Flow ProblemsDocument55 pagesDimensional Analysis for Fluid Flow ProblemspatriciaNo ratings yet
- Variance Analysis - CompleteDocument3 pagesVariance Analysis - CompletepatriciaNo ratings yet
- Threads in Python ProgrammingDocument30 pagesThreads in Python ProgrammingpatriciaNo ratings yet
- Python basic operators guideDocument9 pagesPython basic operators guidepatriciaNo ratings yet
- Top 100 Hadoop Interview QuestionsDocument17 pagesTop 100 Hadoop Interview QuestionspatriciaNo ratings yet
- Python - Multithreaded ProgrammingDocument9 pagesPython - Multithreaded ProgrammingpatriciaNo ratings yet
- Namibia University Financial Mathematics ExamDocument4 pagesNamibia University Financial Mathematics ExampatriciaNo ratings yet
- R Tutorial - Find Max, Min, Mean, Most Repeated Numbers & MoreDocument2 pagesR Tutorial - Find Max, Min, Mean, Most Repeated Numbers & MorepatriciaNo ratings yet
- Fim601s - Financial Mathematics 2 - 2ND Opp - July 2018Document5 pagesFim601s - Financial Mathematics 2 - 2ND Opp - July 2018patriciaNo ratings yet
- R Tutorial For Beginner Level 1Document2 pagesR Tutorial For Beginner Level 1patriciaNo ratings yet
- 2 Step Option Pricing ModelDocument8 pages2 Step Option Pricing ModelpatriciaNo ratings yet
- PDF DatastreamDocument290 pagesPDF DatastreamAlison JcNo ratings yet
- Lecture 10 PDFDocument73 pagesLecture 10 PDFpatriciaNo ratings yet
- GOFForLogisticRegression PaperDocument13 pagesGOFForLogisticRegression PaperSeyChell NorinhaNo ratings yet
- BS 6744 - 2001Document29 pagesBS 6744 - 2001Duminda AnuradhaNo ratings yet
- Cell Type UR18650F: SpecificationsDocument5 pagesCell Type UR18650F: SpecificationsIskandar WirawanNo ratings yet
- Beginning Algebra 9th Edition Tobey Test Bank DownloadDocument49 pagesBeginning Algebra 9th Edition Tobey Test Bank DownloadMary Bumgarner100% (22)
- Cause and Effect LawDocument44 pagesCause and Effect Lawsubhendu DasNo ratings yet
- SmithMinton Calculus ET 5e C01 S01Document12 pagesSmithMinton Calculus ET 5e C01 S01maged wagehNo ratings yet
- Steel Bridge Design Handbook (US DT FHA)Document1,974 pagesSteel Bridge Design Handbook (US DT FHA)Ulissipo1955No ratings yet
- Take Home WorksheetDocument3 pagesTake Home WorksheetXu ShennaNo ratings yet
- Inform 7 Cheat SheetDocument6 pagesInform 7 Cheat SheetBrandon Curtis AugustineNo ratings yet
- Lesson 13-The Solar System 1 - Outer Planets 2Document19 pagesLesson 13-The Solar System 1 - Outer Planets 2Kate Ngọc DiệpNo ratings yet
- Seismic Analysis and Design of RC Framed Multi-Storey Office BuildingDocument216 pagesSeismic Analysis and Design of RC Framed Multi-Storey Office BuildingMuthulakshmi MaruthanayagamNo ratings yet
- Cooling Tower DesignDocument4 pagesCooling Tower DesignRavi KasaudhanNo ratings yet
- Dim Dos DontsDocument3 pagesDim Dos DontsJake Polo SantiagoNo ratings yet
- 2021spring Chemistry 111 StefikDocument10 pages2021spring Chemistry 111 StefikMorgan GalushaNo ratings yet
- Lect 1 Limit State DesignDocument31 pagesLect 1 Limit State DesignWaleed Yahia100% (1)
- Kinetics PretestDocument4 pagesKinetics PretestAngeline SmithNo ratings yet
- Quiz For International Candidates of CUHK-Shenzhen - 2020214-Session 2Document2 pagesQuiz For International Candidates of CUHK-Shenzhen - 2020214-Session 2Fadhilah DefayanaNo ratings yet
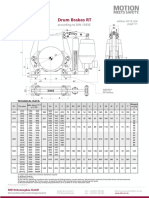
- Drum Brakes RT: According To DIN 15435Document1 pageDrum Brakes RT: According To DIN 15435LukaNo ratings yet
- PELTON BUCKET TITLEDocument4 pagesPELTON BUCKET TITLESuhasNo ratings yet
- Writing Assignment 2 1Document1 pageWriting Assignment 2 1api-643549479No ratings yet
- Design and Analysis of Impact CrushersDocument49 pagesDesign and Analysis of Impact CrushersAbebaw WorkieNo ratings yet
- Delta ASDA-A2 Series Servo Drive & Motor GuideDocument72 pagesDelta ASDA-A2 Series Servo Drive & Motor Guidefreud007No ratings yet
- Taiwanese IMO 2014: A Brief Reflection on the Selection ProcessDocument25 pagesTaiwanese IMO 2014: A Brief Reflection on the Selection ProcessCường Nguyễn KhắcNo ratings yet
- Lesson 2 EvaluationDocument1 pageLesson 2 Evaluationapi-239996848No ratings yet
- Mark Halverson PHD Data Scientist ResumeDocument1 pageMark Halverson PHD Data Scientist Resumeapi-269922428No ratings yet
- Numerical and Experimental Performance Investigation of A Heat ExchangerDocument12 pagesNumerical and Experimental Performance Investigation of A Heat ExchangerGuilherme RighetoNo ratings yet
- Physics 9702 Paper 1 - KinematicsDocument49 pagesPhysics 9702 Paper 1 - KinematicsTom ChanNo ratings yet
- Bgcse Physics Paper 3 2008Document16 pagesBgcse Physics Paper 3 2008Katlego LebekweNo ratings yet
- 1 Space, Time, and SpacetimeDocument4 pages1 Space, Time, and SpacetimexerenusNo ratings yet
- SANKALP - PsdfHASE VII - GO - 4Document5 pagesSANKALP - PsdfHASE VII - GO - 4Unfortunate GamerNo ratings yet