You might also like
- NAG 1 - 42RLE 2005 300 Hemi TransDocument836 pagesNAG 1 - 42RLE 2005 300 Hemi Transanon_158071697No ratings yet
- 2016-2017 Ducati Xdiavel SDocument1,137 pages2016-2017 Ducati Xdiavel SNagyCsaba100% (2)
- Paladin DesignBase ProgramsDocument2 pagesPaladin DesignBase ProgramsAna HaziNo ratings yet
- Transformer - NT PDFDocument108 pagesTransformer - NT PDFReshab Sahoo100% (1)
- Presentation1.distribution System - HOWDocument32 pagesPresentation1.distribution System - HOWSHEETAL PARMARNo ratings yet
- Three Phase AlternatorDocument8 pagesThree Phase AlternatorJames BalaisNo ratings yet
- Chapter 13 PduDocument57 pagesChapter 13 Pduarslan khalidNo ratings yet
- Reliability Evaluation of Grid-Connected Photovoltaic Power SystemsDocument32 pagesReliability Evaluation of Grid-Connected Photovoltaic Power Systemssamsai88850% (2)
- Product MANUAL: L110H, L120HDocument42 pagesProduct MANUAL: L110H, L120HHaris100% (2)
- Radial Feeder ProtectionDocument14 pagesRadial Feeder Protectionanandhuravindran2002No ratings yet
- How To Calculate or Design A SolarDocument8 pagesHow To Calculate or Design A Solarhammad engineeringNo ratings yet
- PF-5500-5510 Eff 172698Document478 pagesPF-5500-5510 Eff 172698Jose Eduardo Casanueva Ochoa100% (2)
- 4 System Components and Configurations PDFDocument47 pages4 System Components and Configurations PDFathira9satheesanNo ratings yet
- Proposal FOR: Design and Simulation of A Solar PV System University of GollisDocument24 pagesProposal FOR: Design and Simulation of A Solar PV System University of GollisYG DENo ratings yet
- Solar Micro ControllerDocument18 pagesSolar Micro ControllerElangovanNo ratings yet
- Electronics Circuits For CommunicationsDocument46 pagesElectronics Circuits For CommunicationsLee RitzNo ratings yet
- EIM Electrical Tools Winstonjun N. TuliaoDocument57 pagesEIM Electrical Tools Winstonjun N. Tuliaowinstonjun n. TuliaoNo ratings yet
- Pneumatics CircuitDocument69 pagesPneumatics CircuitAjay Chacko100% (2)
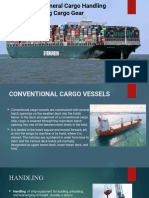
- Conventional General Cargo Handling Including Cargo GearDocument38 pagesConventional General Cargo Handling Including Cargo GearDELA CRUZ MARK JOSHUA100% (1)
- DC Motor PresentationDocument31 pagesDC Motor PresentationDony Beast (DurraniFared)No ratings yet
- IDS NewDocument128 pagesIDS NewShahbaz Ali100% (1)
- Harmonics in Power SystemDocument5 pagesHarmonics in Power SystemKannan.sNo ratings yet
- Procedure of High Pressure Water Jet CleaningDocument15 pagesProcedure of High Pressure Water Jet CleaningIqbal Safirul Barqi100% (7)
- Lecture 04 - TransformersDocument96 pagesLecture 04 - TransformersMo T100% (1)
- Hospitals: A Guide To Energy Efficient and Cost Effective LightingDocument6 pagesHospitals: A Guide To Energy Efficient and Cost Effective LightingMaha RahhalNo ratings yet
- 00Document300 pages00Wasil BabarNo ratings yet
- NSM Cubicle With T200SDocument38 pagesNSM Cubicle With T200SThức Võ100% (2)
- Energy Monitoring and Control PDFDocument33 pagesEnergy Monitoring and Control PDFDoravari LakshmiNo ratings yet
- Energy Audit Types and MethodologyDocument7 pagesEnergy Audit Types and MethodologyNikhilARNo ratings yet
- Project Proposal ... DC MotorDocument6 pagesProject Proposal ... DC MotorIhsan KhanNo ratings yet
- WindmillDocument23 pagesWindmillManav KohliNo ratings yet
- Chapter 2Document14 pagesChapter 2Harsha VardhanNo ratings yet
- Fundamentals of Power System EconomicsDocument31 pagesFundamentals of Power System EconomicsAmol JavahireNo ratings yet
- Lecture 6a - VVVF IM Speed ControlDocument8 pagesLecture 6a - VVVF IM Speed Controlvijaykumar_aluriNo ratings yet
- Improving Electric Energy Result by Using Composition WavelengthDocument5 pagesImproving Electric Energy Result by Using Composition WavelengthDustin WardNo ratings yet
- 30xa602 FullloadDocument1 page30xa602 Fullloadcalvin.bloodaxe4478No ratings yet
- Tutorial Letter 101/0/2019: Opto-Electronics IV (Theory)Document19 pagesTutorial Letter 101/0/2019: Opto-Electronics IV (Theory)Vandiksha MaharajNo ratings yet
- GV-300W Greef Wind Turbine Catalgouev1Document8 pagesGV-300W Greef Wind Turbine Catalgouev1JOE FUNGNo ratings yet
- Single Phase Induction Motors PDFDocument20 pagesSingle Phase Induction Motors PDFAmitava BiswasNo ratings yet
- Trina 550W Tallmax DE18Document2 pagesTrina 550W Tallmax DE18WussbugNo ratings yet
- OTTVDocument61 pagesOTTVmaxwalkerdreamNo ratings yet
- Sizing of Generators: Abraham Jyothimon B.K GulfDocument6 pagesSizing of Generators: Abraham Jyothimon B.K GulfAbraham JyothimonNo ratings yet
- Rainfall As An Energy SourceDocument3 pagesRainfall As An Energy SourceSagar KumarNo ratings yet
- Electrical Engineering Engineering Computer Techniques in Power System Analysis Economic Operation of Power System NotesDocument26 pagesElectrical Engineering Engineering Computer Techniques in Power System Analysis Economic Operation of Power System NotesSIDDHANT SAHUNo ratings yet
- Engineering Management Final ExamDocument2 pagesEngineering Management Final ExamrowelNo ratings yet
- Earthling System Electrical and Instruments Test ProcedureDocument23 pagesEarthling System Electrical and Instruments Test ProcedurejavadNo ratings yet
- Introduction To Measurement SystemsDocument21 pagesIntroduction To Measurement SystemsAkash JamesNo ratings yet
- UNIT 4:-Distribution System: Branch-Electrical & Electronics Engineering (4 Semester)Document37 pagesUNIT 4:-Distribution System: Branch-Electrical & Electronics Engineering (4 Semester)Soumya DarshanNo ratings yet
- Electrical Drives NotesDocument6 pagesElectrical Drives Noteskaushik9595No ratings yet
- Study of Business Model of ESCOS - ProposalDocument14 pagesStudy of Business Model of ESCOS - ProposalwaelNo ratings yet
- LED PresentationDocument36 pagesLED PresentationYashwanth MnNo ratings yet
- Lecture 1 SlidIntroduction To Power ElectronicseDocument37 pagesLecture 1 SlidIntroduction To Power ElectronicseCIMUT125No ratings yet
- T0455-11-16 Rev.0 John - Proposal of Solar Roof Mounting Structure For 5 M...Document8 pagesT0455-11-16 Rev.0 John - Proposal of Solar Roof Mounting Structure For 5 M...Thai chheanghourtNo ratings yet
- Energy ConservationDocument15 pagesEnergy ConservationManpreet KaurNo ratings yet
- Energy Saving in Induction MotorsDocument11 pagesEnergy Saving in Induction MotorsS Bharadwaj ReddyNo ratings yet
- Transmission and Distribution DesignDocument3 pagesTransmission and Distribution DesignPratikTiwariNo ratings yet
- Chapter 8Document17 pagesChapter 8Yanendra SahNo ratings yet
- PMPDocument30 pagesPMPFeras Mohammed SiddigNo ratings yet
- Catalogue - 40.5kV T Type OVCB PDFDocument20 pagesCatalogue - 40.5kV T Type OVCB PDFGanesh Duraisamy0% (1)
- EE306 Power System Analysis Hadi SaadatDocument18 pagesEE306 Power System Analysis Hadi SaadatGayathri S. NairNo ratings yet
- Modeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabDocument12 pagesModeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabIAEME PublicationNo ratings yet
- Applied Directly To The Stator WindingsDocument53 pagesApplied Directly To The Stator WindingsSew HunNo ratings yet
- DC MACH - Chapter 5Document53 pagesDC MACH - Chapter 5marryjohnopalla05No ratings yet
- Applied Directly To The Stator WindingsDocument62 pagesApplied Directly To The Stator WindingsZekarias tenawNo ratings yet
- Applied Directly To The Stator WindingsDocument62 pagesApplied Directly To The Stator WindingsZekarias tenawNo ratings yet
- PPT1 Unit 3 DC Motor Working, Types, Torque and Speed Equation, Applications, CharacteristicsDocument47 pagesPPT1 Unit 3 DC Motor Working, Types, Torque and Speed Equation, Applications, CharacteristicsRAMESH BABU EEENo ratings yet
- MS-16GC Disassembly GuideDocument18 pagesMS-16GC Disassembly GuideAriyawira BinuiNo ratings yet
- PL PDFDocument3 pagesPL PDFFERDINAND BANAGANo ratings yet
- SRX712M: 12" Two-Way Stage Monitor/ Utility SpeakerDocument2 pagesSRX712M: 12" Two-Way Stage Monitor/ Utility SpeakerRafael Tinajero RaflesNo ratings yet
- Sample Electrical PlanDocument1 pageSample Electrical PlanMichael SabaulanNo ratings yet
- Critical Components Table Rev35Document5 pagesCritical Components Table Rev35ashishtrueNo ratings yet
- KYOCERA fs2020d - MANUAL SERVICE PDFDocument135 pagesKYOCERA fs2020d - MANUAL SERVICE PDFSmart PlanNo ratings yet
- DH Wire Rope HoistsDocument104 pagesDH Wire Rope HoistsMarek BMNo ratings yet
- QUARTER 3, Week 5, Session 1Document8 pagesQUARTER 3, Week 5, Session 1Princess Aimie LalongisipNo ratings yet
- Opel Corsa C Oil Filter ReplacementDocument12 pagesOpel Corsa C Oil Filter ReplacementAndrásBakosNo ratings yet
- Error en Tarjeta de RedDocument1 pageError en Tarjeta de RedElvira RodNo ratings yet
- Service Manual - Handycam - Dcrtrv130eDocument165 pagesService Manual - Handycam - Dcrtrv130epycNo ratings yet
- Report 125Document35 pagesReport 125DonNo ratings yet
- Sistem PuliDocument31 pagesSistem Pulimega rahayuNo ratings yet
- BFV Databook v7.3 LowresDocument90 pagesBFV Databook v7.3 LowresKingkaew KungsadanpipopNo ratings yet
- DL205 User Manual Vol1 PDFDocument415 pagesDL205 User Manual Vol1 PDFLoloy NorybNo ratings yet
- Electrical RatesDocument14 pagesElectrical RatesAnsaf AskyNo ratings yet
- LO 5.5 Network Topology Bus TopologyDocument10 pagesLO 5.5 Network Topology Bus TopologyAundrei ValdezNo ratings yet
- Comp7 - Answer Key - Dec. Exam - 1st SetDocument2 pagesComp7 - Answer Key - Dec. Exam - 1st SetHazel Joy LusellaNo ratings yet
- 1000 - NEPP Part Presentation Update 6-18-2019 - PJM (EEE-INST-002)Document13 pages1000 - NEPP Part Presentation Update 6-18-2019 - PJM (EEE-INST-002)Dani_01No ratings yet
- PE DF 151series - 2018 11Document14 pagesPE DF 151series - 2018 11عبدالودود المحفديNo ratings yet
- Designguide Div26 ElectricalDocument81 pagesDesignguide Div26 ElectricalRochelle Espero - IAAANo ratings yet
- Quiz Ece427Document16 pagesQuiz Ece427Saraswathi AsirvathamNo ratings yet