You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- MSX User - Vol 1 No 1 - Dec 1984Document100 pagesMSX User - Vol 1 No 1 - Dec 1984Buleste100% (2)
- Computerised Learner's Licence Final PDFDocument26 pagesComputerised Learner's Licence Final PDFJannie71% (7)
- P2V Migration ChecklistDocument2 pagesP2V Migration ChecklistchochuNo ratings yet
- JavaDocument69 pagesJavaJohn David100% (1)
- Risc-V Swerv™ El2 Programmer'S Reference Manual: March 29, 2020Document117 pagesRisc-V Swerv™ El2 Programmer'S Reference Manual: March 29, 2020Qasim ZamanNo ratings yet
- Google C++ Testing Framework: Running Test Programs: Advanced OptionsDocument18 pagesGoogle C++ Testing Framework: Running Test Programs: Advanced OptionsAdip ChyNo ratings yet
- 17 Allocation BasicDocument33 pages17 Allocation BasicAdip ChyNo ratings yet
- EE538 Homework 2Document1 pageEE538 Homework 2Adip ChyNo ratings yet
- Microelectronics Reliability: P.F. Butzen, V. Dal Bem, A.I. Reis, R.P. RibasDocument5 pagesMicroelectronics Reliability: P.F. Butzen, V. Dal Bem, A.I. Reis, R.P. RibasAdip ChyNo ratings yet
- Cse590490 HW2Document5 pagesCse590490 HW2Adip ChyNo ratings yet
- EE538 HW1 SolutionDocument4 pagesEE538 HW1 SolutionAdip ChyNo ratings yet
- Multicores, Multiprocessors, and P, ClustersDocument51 pagesMulticores, Multiprocessors, and P, ClustersAdip ChyNo ratings yet
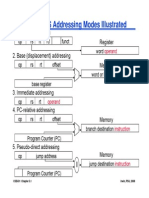
- Review: MIPS Addressing Modes Illustrated: 1. Register Addressing Register 2. Base (Displacement) Addressing MemoryDocument31 pagesReview: MIPS Addressing Modes Illustrated: 1. Register Addressing Register 2. Base (Displacement) Addressing MemoryAdip ChyNo ratings yet
- Arithmetic For ComputersDocument48 pagesArithmetic For ComputersAdip ChyNo ratings yet
- Chapter 4B: The Processor, Part B: Mary Jane IrwinDocument56 pagesChapter 4B: The Processor, Part B: Mary Jane IrwinAdip ChyNo ratings yet
- EE 536 Fall2013 SyllabusDocument1 pageEE 536 Fall2013 SyllabusAdip ChyNo ratings yet
- Instructions: Language of The Computer PDocument92 pagesInstructions: Language of The Computer PAdip ChyNo ratings yet
- Homework #3 Solutions: Spring 2013Document2 pagesHomework #3 Solutions: Spring 2013Adip ChyNo ratings yet
- Gem 5Document3 pagesGem 5Adip ChyNo ratings yet
- EE 478 Lec02 DD Fundamentals1Document25 pagesEE 478 Lec02 DD Fundamentals1Adip ChyNo ratings yet
- Deepak Manglani Resume PDFDocument1 pageDeepak Manglani Resume PDFMohd Amir KhanNo ratings yet
- How Mongodb Enables Real-Time Data With Event-Driven ArchitectureDocument23 pagesHow Mongodb Enables Real-Time Data With Event-Driven Architecturethe4powerNo ratings yet
- Clements A. Practical Computer Architecture With Python and ARM 2023Document659 pagesClements A. Practical Computer Architecture With Python and ARM 2023Paulo AlmeidaNo ratings yet
- Chapter 18: C++ As A Better C Introducing Object TechnologyDocument23 pagesChapter 18: C++ As A Better C Introducing Object Technologyali resulNo ratings yet
- Price LsitDocument8 pagesPrice LsitMichaelben MichaelbenNo ratings yet
- Yotta Cat EngDocument18 pagesYotta Cat EngMarcelo ChocaNo ratings yet
- Atividade 2Document11 pagesAtividade 2Everton MoustacheNo ratings yet
- Ns 2 Lab Programs - ListDocument4 pagesNs 2 Lab Programs - Listarulnatrajan0% (1)
- Lecture 8: TimersDocument3 pagesLecture 8: Timersvtech247No ratings yet
- Microcomputer and Interfacing PDFDocument26 pagesMicrocomputer and Interfacing PDFDemisew Teferi100% (4)
- BasiEgaXorz - Sega Genesis BASIC Compiler - V1Document38 pagesBasiEgaXorz - Sega Genesis BASIC Compiler - V1Jordi R.No ratings yet
- Form 3 - ppt#2Document13 pagesForm 3 - ppt#2Jay JayNo ratings yet
- Red Hat Enterprise Linux 6 Deployment Guide en USDocument813 pagesRed Hat Enterprise Linux 6 Deployment Guide en USKumar KushaalNo ratings yet
- Parallel Port TutorialDocument7 pagesParallel Port Tutorialrichad villanuevaNo ratings yet
- IAETSD March-C Algorithm For Embedded Memories in FPGADocument3 pagesIAETSD March-C Algorithm For Embedded Memories in FPGAiaetsdiaetsdNo ratings yet
- Streamvault SVW 300eDocument2 pagesStreamvault SVW 300eMIGUEL ANGEL LAZARTE SANCHEZNo ratings yet
- Grass Valley EDIUS 7 FAQsDocument3 pagesGrass Valley EDIUS 7 FAQshypergodNo ratings yet
- Novastar LED Display Video Controller VX4 Series User's ManualDocument31 pagesNovastar LED Display Video Controller VX4 Series User's Manualrdeckard97No ratings yet
- DOP-107EG: Instruction SheetDocument2 pagesDOP-107EG: Instruction Sheetjhovani ismael salazar contrerasNo ratings yet
- Unit-5 Displaying Pictures and Menus With Views: Using Menus With Viewscreating TheDocument3 pagesUnit-5 Displaying Pictures and Menus With Views: Using Menus With Viewscreating TheMadhava KrishnaNo ratings yet
- SharepointDocument75 pagesSharepointJorge Enrique Rico MarulandaNo ratings yet
- Operating System Definition and Function: o o o oDocument10 pagesOperating System Definition and Function: o o o oJagjit GillNo ratings yet
- W 2 PrintDocument2 pagesW 2 PrintStephen Vash RamosNo ratings yet
- Usb Cam LogDocument2 pagesUsb Cam LogAjiNo ratings yet
- Cse 2054 Dqac QB PC Aug 2023Document16 pagesCse 2054 Dqac QB PC Aug 2023Jabla JackNo ratings yet