You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Sprint-8 Intervals: Turn On Your Afterburners!: Directions: For "Optimal" Results, Follow These Simple GuidelinesDocument1 pageSprint-8 Intervals: Turn On Your Afterburners!: Directions: For "Optimal" Results, Follow These Simple Guidelinesknowman1No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Canepari - ElanguageDocument1 pageCanepari - Elanguageknowman1No ratings yet
- 64 Great Chess GamesDocument306 pages64 Great Chess GamesManijak999100% (6)
- Foundations of Illocutionary LogicDocument237 pagesFoundations of Illocutionary Logicknowman1100% (7)
- The Truth About ExerciseDocument1 pageThe Truth About Exerciseknowman1No ratings yet
- Using Visual Patterns To Facilitate LearningDocument18 pagesUsing Visual Patterns To Facilitate Learningknowman1No ratings yet
- The Bysl3x High Range IQ Test by DR Jason BettsDocument1 pageThe Bysl3x High Range IQ Test by DR Jason Bettsknowman1No ratings yet
- How To Think Brilliantly and Creatively in Mathematics: Some Guiding Thoughts For Teachers, Coaches, StudentsDocument39 pagesHow To Think Brilliantly and Creatively in Mathematics: Some Guiding Thoughts For Teachers, Coaches, Studentsknowman1No ratings yet
- Singapore Model Method Examples PDFDocument22 pagesSingapore Model Method Examples PDFknowman1No ratings yet
- International Conference On Mathematics Textbook Research and Development 2014Document33 pagesInternational Conference On Mathematics Textbook Research and Development 2014knowman1No ratings yet
- LogixDocument1 pageLogixknowman1No ratings yet
- Red BlueDocument1 pageRed Blueknowman1No ratings yet
- CanopusDocument1 pageCanopusknowman1No ratings yet
- WittDocument2 pagesWittknowman1No ratings yet
- (Ruth Hurmence Green) The Born Again Skeptic's Gui (Book4You)Document163 pages(Ruth Hurmence Green) The Born Again Skeptic's Gui (Book4You)knowman1No ratings yet
- The Circle High Range IQ Test by DR Jason BettsDocument1 pageThe Circle High Range IQ Test by DR Jason Bettsknowman1No ratings yet
- The Most Common Chinese Characters in Order of FrequencyDocument96 pagesThe Most Common Chinese Characters in Order of Frequencyknowman1No ratings yet
- The Xen High Range IQ Test by DR Jason BettsDocument1 pageThe Xen High Range IQ Test by DR Jason Bettsknowman1No ratings yet
- The Most Common Chinese Characters in Order of FrequencyDocument96 pagesThe Most Common Chinese Characters in Order of Frequencyknowman1No ratings yet
- HamNoSys HandshapesDocument1 pageHamNoSys Handshapesknowman1No ratings yet
- Let's Expand Rota's Twelvefold Way For Counting Partitions!: Dedicated To The Memory of Gian-Carlo RotaDocument26 pagesLet's Expand Rota's Twelvefold Way For Counting Partitions!: Dedicated To The Memory of Gian-Carlo Rotaknowman1No ratings yet
- Short Tutorial On Generative Grammars: - A Generative Grammar Is Given byDocument9 pagesShort Tutorial On Generative Grammars: - A Generative Grammar Is Given byknowman1No ratings yet
- Assignment 1-Vignesh Prasad VDocument14 pagesAssignment 1-Vignesh Prasad VVignesh Veera Prasad100% (1)
- CKM 200 Car Key Master ManualDocument33 pagesCKM 200 Car Key Master Manualselereak100% (1)
- Summat IveDocument10 pagesSummat IveNorma Panares100% (1)
- Capstone Fs 63 Technical InfoDocument2 pagesCapstone Fs 63 Technical InfoAPEX SONNo ratings yet
- Drainage Morphology of Imo Basin in The Anambra - Imo River Basin Area, of Imo State, Southern NigeriaDocument11 pagesDrainage Morphology of Imo Basin in The Anambra - Imo River Basin Area, of Imo State, Southern NigeriannekaNo ratings yet
- Kereta SolarDocument26 pagesKereta SolarZam BisuNo ratings yet
- Lyrics BLOODY MARYDocument1 pageLyrics BLOODY MARYMuhd Baqir AzidzNo ratings yet
- NoteMapper User GuideDocument25 pagesNoteMapper User GuideJuan PalaciosNo ratings yet
- Bss Assignment ..Document5 pagesBss Assignment ..Tanmay JainNo ratings yet
- Sven Hoeger Case Study Habirshaw ParkDocument11 pagesSven Hoeger Case Study Habirshaw ParkRoberthothanNo ratings yet
- Report 219 (Final)Document18 pagesReport 219 (Final)TalHa IFtiKharNo ratings yet
- Worksheet ExerciseDocument2 pagesWorksheet Exerciseshaan shekharNo ratings yet
- Q2 - Melc 10 - 11Document56 pagesQ2 - Melc 10 - 11Geraldine MatiasNo ratings yet
- Seismic Safety Assessment of Existing Low-Rise RC Buildings WithDocument9 pagesSeismic Safety Assessment of Existing Low-Rise RC Buildings Withalvaro bustamante silvaNo ratings yet
- Suppurative Lung Diseases.Document37 pagesSuppurative Lung Diseases.Salman KhanNo ratings yet
- Opamp DesignDocument60 pagesOpamp DesignSiva KumarNo ratings yet
- 12 - WaywardDocument119 pages12 - WaywardAndy WilliamsNo ratings yet
- Bsbia News: President'S MessageDocument5 pagesBsbia News: President'S MessagejesudassajNo ratings yet
- DZ 200 CdiDocument2 pagesDZ 200 CdipowerveeNo ratings yet
- Case Study of Kaleshwaram ProjectDocument4 pagesCase Study of Kaleshwaram ProjectsujithaNo ratings yet
- Progress of Refractories Used in BFDocument8 pagesProgress of Refractories Used in BFAloísio Simões RibeiroNo ratings yet
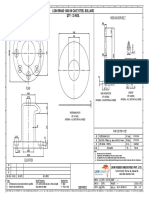
- M56 Anchor Bolt: Lion Brand 1000 KN Cast Steel Bollard Qty - 32 NosDocument1 pageM56 Anchor Bolt: Lion Brand 1000 KN Cast Steel Bollard Qty - 32 NossanaNo ratings yet
- 19BSP1650 - SIP Executive Summary 2 PDFDocument1 page19BSP1650 - SIP Executive Summary 2 PDFnandini swamiNo ratings yet
- Asignación Final InglésDocument2 pagesAsignación Final InglésMarcela GonzálezNo ratings yet
- Grades 9,10 Revision SheetsDocument22 pagesGrades 9,10 Revision SheetsALKHANSAA ELOBEIDYNo ratings yet
- Ishmael MkandawireDocument5 pagesIshmael Mkandawiredanniesande06No ratings yet
- Sailor Mini MoonDocument9 pagesSailor Mini MoonCarytoNo ratings yet
- 8 - Schlumberger - Alberto Stevens Well Integrity Evaluation With Wireline LogsDocument16 pages8 - Schlumberger - Alberto Stevens Well Integrity Evaluation With Wireline LogsHendrik FoxNo ratings yet
- Nickel SulfateDocument127 pagesNickel SulfateMayerly Giraldo AvilaNo ratings yet
- Heart Disease and Stroke BrochureDocument3 pagesHeart Disease and Stroke Brochureapi-461951012No ratings yet