You might also like
- D&D 4th Edition - Character Sheets (Fillable)Document2 pagesD&D 4th Edition - Character Sheets (Fillable)davidayre123450% (2)
- Divali PujaDocument6 pagesDivali Pujaflashplays GamesNo ratings yet
- Create Subassemblies That Think Outside The Box With Subassembly Composer For AutoCAD® Civil 3D®Document43 pagesCreate Subassemblies That Think Outside The Box With Subassembly Composer For AutoCAD® Civil 3D®dmarius_15100% (1)
- Mega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3From EverandMega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3No ratings yet
- Lab 1 Introduction To Stm32F103 and Ide: St-Link V2 and Keil Uvision5Document33 pagesLab 1 Introduction To Stm32F103 and Ide: St-Link V2 and Keil Uvision5Kiều NguyễnNo ratings yet
- ESP32 DevKit ESP32Document6 pagesESP32 DevKit ESP32D'Joko SusiloNo ratings yet
- Atmega328 Arduino UnoDocument29 pagesAtmega328 Arduino Unoanthoniusokoti004No ratings yet
- ARM: GPIO (General Purpose Input Output Register) - ..Document5 pagesARM: GPIO (General Purpose Input Output Register) - ..andresteve07No ratings yet
- LPC2148Document5 pagesLPC2148kaushikei22No ratings yet
- Arduino ProgramationDocument28 pagesArduino ProgramationRod SupervlogsNo ratings yet
- LPC176XX InterfacingDocument54 pagesLPC176XX InterfacingSam techNo ratings yet
- GPIO ProgrammingDocument12 pagesGPIO ProgrammingNikhil SinghNo ratings yet
- LPC1768 GPIO Programming TutorialDocument5 pagesLPC1768 GPIO Programming Tutorialsiva kumaarNo ratings yet
- How To Read This Chapter: Chapter 16: LPC29xx General Purpose Input/Output (GPIO)Document3 pagesHow To Read This Chapter: Chapter 16: LPC29xx General Purpose Input/Output (GPIO)Vaibhav JadhavNo ratings yet
- Ntroduction To ARM7 LPC2148 MicrocontrollerDocument5 pagesNtroduction To ARM7 LPC2148 MicrocontrollercaseguysNo ratings yet
- LM3S6965Document3 pagesLM3S6965WanBi TaNo ratings yet
- How To Start Programming For ARM7 Based LPC2148 MicrocontrollerDocument5 pagesHow To Start Programming For ARM7 Based LPC2148 Microcontrollerrudra_1No ratings yet
- ARM7 Based LPC2148 MicrocontrollerDocument4 pagesARM7 Based LPC2148 MicrocontrollerPalani PicoNo ratings yet
- Expand Port ArduinoDocument8 pagesExpand Port Arduino5tificoNo ratings yet
- Arduino Uno & Respbarry Pi & Node Mcu CodesDocument29 pagesArduino Uno & Respbarry Pi & Node Mcu CodesFiza ShakeelNo ratings yet
- Arm Programs GpioDocument15 pagesArm Programs GpioA.n. Mukunda RaoNo ratings yet
- LPC2148 GPIO Tutorial (LED, Switch Interfacing) - EmbeTronicXDocument13 pagesLPC2148 GPIO Tutorial (LED, Switch Interfacing) - EmbeTronicXAkshay Jadhav100% (1)
- MSP430 - C7 - Course Lesson1 - MCUDocument35 pagesMSP430 - C7 - Course Lesson1 - MCUHải NamNo ratings yet
- Module 4Document75 pagesModule 4Yash DiwanNo ratings yet
- Raspberrypi 202211 - (ENG) - GUIDE-IOSDocument33 pagesRaspberrypi 202211 - (ENG) - GUIDE-IOSMulyadi KusumaNo ratings yet
- Embetronicx Com Tutorials Microcontrollers stm32 stm32 GpioDocument27 pagesEmbetronicx Com Tutorials Microcontrollers stm32 stm32 Gpiovictor sanchezNo ratings yet
- GPIO Initialization For ARM MicroprocessorDocument25 pagesGPIO Initialization For ARM MicroprocessorCristian Santana RodriguezNo ratings yet
- STM32F407 Parallel I - O Ports. Reference - STM32F407 User ManualDocument23 pagesSTM32F407 Parallel I - O Ports. Reference - STM32F407 User ManualWalid AmriNo ratings yet
- COS10004 Lecture 8.1 LED Flash (Part 1) - Pulling A GPIO Pin LowDocument16 pagesCOS10004 Lecture 8.1 LED Flash (Part 1) - Pulling A GPIO Pin LowHồ Thành AnNo ratings yet
- Universidad Nacional Pedro Ruiz Gallo: Facultad de Ciencias Físicas y MatemáticasDocument10 pagesUniversidad Nacional Pedro Ruiz Gallo: Facultad de Ciencias Físicas y MatemáticasFlavio SalazarNo ratings yet
- 4 IO - MUX and GPIO Matrix (GPIO, IO - MUX) : 4.1 OverviewDocument42 pages4 IO - MUX and GPIO Matrix (GPIO, IO - MUX) : 4.1 OverviewDooLooNo ratings yet
- Simple GPIO Data of LPC 2148Document11 pagesSimple GPIO Data of LPC 2148Monica GunjalNo ratings yet
- MCB1700 HardwareDocument4 pagesMCB1700 HardwareAdip ChyNo ratings yet
- PIN Select in LPC2148Document3 pagesPIN Select in LPC2148ultimatekp144100% (2)
- ARM STM32L476 Parallel IODocument20 pagesARM STM32L476 Parallel IOSorin NicolaNo ratings yet
- Esp32 PDFDocument5 pagesEsp32 PDFIrfan ZuhriNo ratings yet
- Function and SyntexDocument8 pagesFunction and SyntexSifatNo ratings yet
- Raspberry Pi: Led BlinkingDocument38 pagesRaspberry Pi: Led BlinkingVishal ChoudharyNo ratings yet
- Raspberry Pi-LED BlinkDocument42 pagesRaspberry Pi-LED BlinkVishal ChoudharyNo ratings yet
- Nota ArduinoDocument7 pagesNota ArduinoMior Mohamad Amin bin jamaludinNo ratings yet
- For Air PollutionDocument25 pagesFor Air Pollutionsneha salunkeNo ratings yet
- Lesson 2 - Basic Input and Output (GPIO)Document7 pagesLesson 2 - Basic Input and Output (GPIO)செல்வம் முத்துராமன்No ratings yet
- AT89S52/ AT89C52 8-Bit MicrocontrollerDocument12 pagesAT89S52/ AT89C52 8-Bit MicrocontrollerProjects onlineNo ratings yet
- ARM7Document76 pagesARM7Bajrang sisodiyaNo ratings yet
- Mbed BK Ed2 CH 14Document22 pagesMbed BK Ed2 CH 14Pedro Augusto PeresNo ratings yet
- Embedded Systems Lab ManualDocument60 pagesEmbedded Systems Lab Manualtmuthu123100% (1)
- Features of 32-Bit Arm Cortex-M3 Lpc1768 Microcontroller: Embedded Controller Lab Manual (15ECL68)Document71 pagesFeatures of 32-Bit Arm Cortex-M3 Lpc1768 Microcontroller: Embedded Controller Lab Manual (15ECL68)varalakshmikrNo ratings yet
- BeagleBone and Software Development Using C++ PDFDocument2 pagesBeagleBone and Software Development Using C++ PDFEdgar GuarecucoNo ratings yet
- Internet of Things With PythonDocument6 pagesInternet of Things With PythonKrishna ChaitanyaNo ratings yet
- Electronics Club, IIT Delhi 16 Feb, 2014Document34 pagesElectronics Club, IIT Delhi 16 Feb, 2014Ankit KumarNo ratings yet
- Arduino 101 - Basics of Programming in ArduinoDocument8 pagesArduino 101 - Basics of Programming in ArduinoshujanNo ratings yet
- Unsa Jan (033-19-0048) Lab 8 ItrDocument11 pagesUnsa Jan (033-19-0048) Lab 8 Itrhande ercelNo ratings yet
- Introduction GOIODocument42 pagesIntroduction GOIOGourish GNo ratings yet
- Exp2 ParallelIODocument3 pagesExp2 ParallelIOvarunpatiNo ratings yet
- ArduinoDocument22 pagesArduinosugadev74No ratings yet
- 4 SensorsDocument26 pages4 SensorsRoger BarretoNo ratings yet
- Lab 2Document9 pagesLab 2anonymous bunnyNo ratings yet
- ApugDocument11 pagesApugMaximiliano VanegasNo ratings yet
- ESP32 Pinout ReferenceDocument16 pagesESP32 Pinout ReferencesarbiniNo ratings yet
- KY 020 Joy ITDocument3 pagesKY 020 Joy ITDibanhi LópezNo ratings yet
- Things of Internet NotesDocument28 pagesThings of Internet Notescoachingmaster7No ratings yet
- KY-031 Hit-Knock Sensor Module ENG 2Document17 pagesKY-031 Hit-Knock Sensor Module ENG 2Jason SuthersNo ratings yet
- CED19I032Document18 pagesCED19I032Pranavram VNo ratings yet
- Ceng3420 HW3Document2 pagesCeng3420 HW3ivankevinNo ratings yet
- 1111 - Schedule Maggie Chan (2013.5.28)Document3 pages1111 - Schedule Maggie Chan (2013.5.28)ivankevinNo ratings yet
- Beijing 2008Document2 pagesBeijing 2008ivankevinNo ratings yet
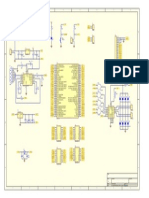
- ARM07 SchematicDocument1 pageARM07 SchematicivankevinNo ratings yet
- 2013 Add Drop FormDocument1 page2013 Add Drop FormivankevinNo ratings yet
- Menu Leaflet Innerside 20091010Document2 pagesMenu Leaflet Innerside 20091010ivankevinNo ratings yet
- WritingDocument10 pagesWritingWiindySmileNo ratings yet
- CS420 Spring 2014: Programming Assignment 1 & 2Document3 pagesCS420 Spring 2014: Programming Assignment 1 & 2Silvester JangNo ratings yet
- Ict Lesson PlanDocument14 pagesIct Lesson PlanSreebu Bahuleyan100% (1)
- Day 1 Article WordlistDocument3 pagesDay 1 Article WordlistZulkhumor SattarovaNo ratings yet
- Mandarin Class Lesson 03 - NumbersDocument3 pagesMandarin Class Lesson 03 - NumbersvtyhscribdNo ratings yet
- Noun Group StructureDocument23 pagesNoun Group StructureTAMARA ANGELA MANURUNGNo ratings yet
- Speaking Assessment Sheet 3AB DescriptionDocument1 pageSpeaking Assessment Sheet 3AB DescriptionLuis Fernando Gómez VargasNo ratings yet
- The Twofish Encryption AlgorithmDocument5 pagesThe Twofish Encryption AlgorithmMaysam AlkeramNo ratings yet
- Database:: Introduction To Database: A. B. C. DDocument4 pagesDatabase:: Introduction To Database: A. B. C. DGagan JosanNo ratings yet
- CSE 2204 Database Systems Lesson Plan 2016Document4 pagesCSE 2204 Database Systems Lesson Plan 2016srssNo ratings yet
- Types of ErrorsDocument3 pagesTypes of ErrorsM Rifky Wahyu Rahman100% (1)
- Things Fall Apart - Tragic Hero of THDocument10 pagesThings Fall Apart - Tragic Hero of THDaffodilNo ratings yet
- WindowsDocument6 pagesWindowskarwan.il.ahmad1No ratings yet
- A Critical Analysis of The Figure of Wisdom in Proverbs 8Document25 pagesA Critical Analysis of The Figure of Wisdom in Proverbs 8EmmanuelNo ratings yet
- A - Listening: 1. Listen and Circle The Correct OptionDocument4 pagesA - Listening: 1. Listen and Circle The Correct Optionsandramadeira-1No ratings yet
- Someone Like You by Adele: Fill in The Blanks With The Correct Form of The Verbs in Past TenseDocument1 pageSomeone Like You by Adele: Fill in The Blanks With The Correct Form of The Verbs in Past TenseAbigail Fernández100% (1)
- Ajax Solved MCQs - 1Document3 pagesAjax Solved MCQs - 1Akal Man ShakyaNo ratings yet
- SQL Joins QueryDocument9 pagesSQL Joins Queryabdhana100% (3)
- Bmo1 2023Document2 pagesBmo1 2023Biswanath BhattacharyaNo ratings yet
- Needs Analysis and Types of Needs AssessmentDocument19 pagesNeeds Analysis and Types of Needs AssessmentglennNo ratings yet
- English World Teachers Book Unit 1 Level 6 PDFDocument14 pagesEnglish World Teachers Book Unit 1 Level 6 PDFmaram alhusbanNo ratings yet
- READMEDocument2 pagesREADMELailaNo ratings yet
- Fujitsu SDNWPDocument9 pagesFujitsu SDNWPBoopathy PandiNo ratings yet
- Module 4Document20 pagesModule 4ragavendra4No ratings yet
- The Book British English TeacherDocument8 pagesThe Book British English Teachergkjw897hr4No ratings yet
- LinkersDocument2 pagesLinkersAgostina GándaraNo ratings yet
- 5JJ1 2000Document80 pages5JJ1 2000arhaloNo ratings yet
- Eegame LogcatDocument11 pagesEegame LogcatRenato ArriagadaNo ratings yet