You might also like
- Mothly Average Solar Irradiance Analysis at Srinagar Garhwal, UttarkhandDocument2 pagesMothly Average Solar Irradiance Analysis at Srinagar Garhwal, UttarkhandRakesh ThapliyalNo ratings yet
- Name: Abhishek Narula: Course: B.Tech Section: B Roll No.: 1 Semester: 1Document17 pagesName: Abhishek Narula: Course: B.Tech Section: B Roll No.: 1 Semester: 1Rakesh ThapliyalNo ratings yet
- Electric Drive QuestionsDocument2 pagesElectric Drive QuestionsRakesh ThapliyalNo ratings yet
- Mothly Average Solar Irradiance Analysis at Srinagar Garhwal, UttarkhandDocument1 pageMothly Average Solar Irradiance Analysis at Srinagar Garhwal, UttarkhandRakesh ThapliyalNo ratings yet
- Basic Electrical Practice Questions 1Document2 pagesBasic Electrical Practice Questions 1Rakesh ThapliyalNo ratings yet
- Schedule of Events: S.No. Name of The Event Timings VenueDocument1 pageSchedule of Events: S.No. Name of The Event Timings VenueRakesh ThapliyalNo ratings yet
- Lecture 4 HandoutsDocument26 pagesLecture 4 HandoutsRakesh ThapliyalNo ratings yet
- Your Institute Name: OMR Sheet For CPT ExamDocument1 pageYour Institute Name: OMR Sheet For CPT ExamRakesh ThapliyalNo ratings yet
- University of Madras Students Feed Back Form: DirectionsDocument4 pagesUniversity of Madras Students Feed Back Form: DirectionsRakesh ThapliyalNo ratings yet
- Notice For Debarred ClassesDocument1 pageNotice For Debarred ClassesRakesh ThapliyalNo ratings yet
- Workshop MCMDocument1 pageWorkshop MCMRakesh ThapliyalNo ratings yet
- A07Q - Three Phase CircuitsDocument1 pageA07Q - Three Phase CircuitsRakesh ThapliyalNo ratings yet
- Graphic Era Hill University, Dehradun B.Tech V Sem: Branch: Electrical and Electronics EngineeringDocument12 pagesGraphic Era Hill University, Dehradun B.Tech V Sem: Branch: Electrical and Electronics EngineeringRakesh ThapliyalNo ratings yet
- Comparative Statement Emec LabDocument3 pagesComparative Statement Emec LabRakesh ThapliyalNo ratings yet
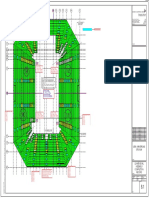
- EM Mec La Ab Layou Ut PlanDocument1 pageEM Mec La Ab Layou Ut PlanRakesh ThapliyalNo ratings yet
- Question Bank - 14ELE15Document6 pagesQuestion Bank - 14ELE15Rakesh ThapliyalNo ratings yet
- Tutorial Sheet DCDocument2 pagesTutorial Sheet DCRakesh ThapliyalNo ratings yet
- Question Bank - 14ELE15Document6 pagesQuestion Bank - 14ELE15Rakesh ThapliyalNo ratings yet
- General HindiDocument16 pagesGeneral HindiRakesh ThapliyalNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Iguard® LM SeriesDocument82 pagesIguard® LM SeriesImran ShahidNo ratings yet
- Sundar Pichai PDFDocument6 pagesSundar Pichai PDFHimanshi Patle100% (1)
- 2 Design of DOSAGE DESIGNDocument16 pages2 Design of DOSAGE DESIGNMarjo100% (1)
- Jacob Stewart ResumeDocument2 pagesJacob Stewart Resumeapi-250063152No ratings yet
- Virtual WorkDocument12 pagesVirtual Workdkgupta28No ratings yet
- Contoh Exposition TextDocument1 pageContoh Exposition TextKristin SeranNo ratings yet
- SDSSSSDDocument1 pageSDSSSSDmirfanjpcgmailcomNo ratings yet
- Analysis of Rates (Nh-15 Barmer - Sanchor)Document118 pagesAnalysis of Rates (Nh-15 Barmer - Sanchor)rahulchauhan7869No ratings yet
- UNIT 5-8 PrintingDocument17 pagesUNIT 5-8 PrintingNOODNo ratings yet
- Teaching Trigonometry Using Empirical Modelling: 2.1 Visual Over Verbal LearningDocument5 pagesTeaching Trigonometry Using Empirical Modelling: 2.1 Visual Over Verbal LearningJeffrey Cariaga Reclamado IINo ratings yet
- Mfin 7002 Investment Analysis and Portfolio ManagementDocument5 pagesMfin 7002 Investment Analysis and Portfolio ManagementjessieNo ratings yet
- Project Quality Plan (JFJS-788)Document18 pagesProject Quality Plan (JFJS-788)mominNo ratings yet
- Unit 1 Module 3 Rep in PlantsDocument26 pagesUnit 1 Module 3 Rep in Plantstamesh jodhanNo ratings yet
- Engleza Referat-Pantilimonescu IonutDocument13 pagesEngleza Referat-Pantilimonescu IonutAilenei RazvanNo ratings yet
- CATaclysm Preview ReleaseDocument52 pagesCATaclysm Preview ReleaseGhaderalNo ratings yet
- Applying For A Job: Pre-ReadingDocument5 pagesApplying For A Job: Pre-ReadingDianitta MaciasNo ratings yet
- Job Satisfaction VariableDocument2 pagesJob Satisfaction VariableAnagha Pawar - 34No ratings yet
- I M Com QT Final On16march2016Document166 pagesI M Com QT Final On16march2016Khandaker Sakib Farhad0% (1)
- John DrydenDocument3 pagesJohn DrydenDunas SvetlanaNo ratings yet
- 4.2.4.5 Packet Tracer - Connecting A Wired and Wireless LAN InstructionsDocument5 pages4.2.4.5 Packet Tracer - Connecting A Wired and Wireless LAN InstructionsAhmadHijaziNo ratings yet
- Industrial ExperienceDocument30 pagesIndustrial ExperienceThe GridLockNo ratings yet
- Kissoft 15,69,0.4Document10 pagesKissoft 15,69,0.4Daggupati PraveenNo ratings yet
- Traditional Perceptions and Treatment of Mental Illness in EthiopiaDocument7 pagesTraditional Perceptions and Treatment of Mental Illness in EthiopiaifriqiyahNo ratings yet
- AISOY1 KiK User ManualDocument28 pagesAISOY1 KiK User ManualLums TalyerNo ratings yet
- Mcdaniel Tanilla Civilian Resume Complete v1Document3 pagesMcdaniel Tanilla Civilian Resume Complete v1api-246751844No ratings yet
- Quality Control of Rigid Pavements 1Document58 pagesQuality Control of Rigid Pavements 1pranjpatil100% (1)
- J.K. Brimacombe - Design of Continuous Casting MachinesDocument13 pagesJ.K. Brimacombe - Design of Continuous Casting MachinesJavier GómezNo ratings yet
- PostScript Quick ReferenceDocument2 pagesPostScript Quick ReferenceSneetsher CrispyNo ratings yet
- KLA28 ProductsapplicationpresetDocument2 pagesKLA28 ProductsapplicationpresetcarxmozNo ratings yet
- СV Nestor RodriguezDocument28 pagesСV Nestor RodriguezKate BrownNo ratings yet