You might also like
- ct62010 2013Document165 pagesct62010 2013Amit Poddar100% (2)
- New Design Method for Digital IIR Filters Based on Artificial Bee Colony AlgorithmDocument21 pagesNew Design Method for Digital IIR Filters Based on Artificial Bee Colony AlgorithmIlham LuthfiNo ratings yet
- Airway Management in The Critically Ill: ReviewDocument9 pagesAirway Management in The Critically Ill: ReviewQuarmina HesseNo ratings yet
- BARACARBDocument2 pagesBARACARBYudha Satria50% (2)
- M/S Majumder Construction: Valuation Statement of PropertyDocument3 pagesM/S Majumder Construction: Valuation Statement of PropertyManoj MajumderNo ratings yet
- Optimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmDocument6 pagesOptimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmIDESNo ratings yet
- Distribution System's Loss Reduction by Optimal Allocation and Sizing of Distributed Generation Via Artificial Bee Colony AlgorithmDocument7 pagesDistribution System's Loss Reduction by Optimal Allocation and Sizing of Distributed Generation Via Artificial Bee Colony AlgorithmAJER JOURNALNo ratings yet
- Optimal Distributed Generation Placement Using Ant Colony OptimizationDocument6 pagesOptimal Distributed Generation Placement Using Ant Colony OptimizationPervez AhmadNo ratings yet
- Continuous Domain Ant Colony Optimization For Distributed Generation Placement and Losses MinimizationDocument8 pagesContinuous Domain Ant Colony Optimization For Distributed Generation Placement and Losses MinimizationIAES IJAINo ratings yet
- DG Placement and Sizing in Radial Distribution Network Using PSO&HBMO AlgorithmsDocument6 pagesDG Placement and Sizing in Radial Distribution Network Using PSO&HBMO AlgorithmsDrVikas Singh BhadoriaNo ratings yet
- Heuristic Curve-Fitted Technique for Optimizing Distributed Generation in Radial Distribution SystemsDocument9 pagesHeuristic Curve-Fitted Technique for Optimizing Distributed Generation in Radial Distribution SystemsAhmed WestministerNo ratings yet
- DG SIZE and LocationDocument8 pagesDG SIZE and LocationAakanksha Dwivedi100% (1)
- Fuzzy and PSODocument8 pagesFuzzy and PSOJuste MachinNo ratings yet
- Paper Oa NOVEL TECHNIQUE FOR REDUCTION OF LOSSES IN RADIAL DISTRIBUTION BY DG SIZINGn DGDocument8 pagesPaper Oa NOVEL TECHNIQUE FOR REDUCTION OF LOSSES IN RADIAL DISTRIBUTION BY DG SIZINGn DGcrecNo ratings yet
- Ola Abdalla Saleh, Mostafa Elshahed, Mahmoud Elsayed Regular Paper Enhancement of Radial Distribution Network With Distributed Generation and System ReconfigurationDocument15 pagesOla Abdalla Saleh, Mostafa Elshahed, Mahmoud Elsayed Regular Paper Enhancement of Radial Distribution Network With Distributed Generation and System ReconfigurationMostafa ElshahedNo ratings yet
- GA Optimization of DG Placement for Loss MinimizationDocument7 pagesGA Optimization of DG Placement for Loss MinimizationJun Huat100% (1)
- Loss ReductionDocument35 pagesLoss Reductionsolomon nchor akansakeNo ratings yet
- Optimal DG Placement for Loss MinimizationDocument30 pagesOptimal DG Placement for Loss MinimizationArdhito PrimatamaNo ratings yet
- Optimal Placement of Multi-Distributed Generation Units Including Different Load Models Using Particle Swarm OptimisationDocument12 pagesOptimal Placement of Multi-Distributed Generation Units Including Different Load Models Using Particle Swarm OptimisationAhmed WestministerNo ratings yet
- EV Aug 2020Document15 pagesEV Aug 2020Akansha SnehaNo ratings yet
- Improved Sequential Quadratic Programming Approach For Optimal Distribution Generation Sizing in Distribution NetworksDocument7 pagesImproved Sequential Quadratic Programming Approach For Optimal Distribution Generation Sizing in Distribution NetworksBibhudatta PatnaikNo ratings yet
- Optimal Reconfiguration and Distributed Generator Allocation in Distribution Network Using An Advanced Adaptive Differential EvolutionDocument7 pagesOptimal Reconfiguration and Distributed Generator Allocation in Distribution Network Using An Advanced Adaptive Differential Evolutionwvargas926No ratings yet
- Optimal Siting and Sizing of Multiple Type Dgs For The Performance Enhancement of Distribution System Using Differential Evolution AlgorithmDocument7 pagesOptimal Siting and Sizing of Multiple Type Dgs For The Performance Enhancement of Distribution System Using Differential Evolution AlgorithmSeid EndrisNo ratings yet
- Reliability of Distribution System With Distributed Generation Using ETAP PDFDocument8 pagesReliability of Distribution System With Distributed Generation Using ETAP PDFgilbertomjcNo ratings yet
- Distribution System Nodal Pricing Analysis With Realistic ZIP Load and Variable Wind Power SourceDocument6 pagesDistribution System Nodal Pricing Analysis With Realistic ZIP Load and Variable Wind Power SourceSudheerKumarNo ratings yet
- Reactive Power Control Using New Grey Wolf Optimizer Algorithm To Minimize Power System LossDocument9 pagesReactive Power Control Using New Grey Wolf Optimizer Algorithm To Minimize Power System LossZellagui EnergyNo ratings yet
- A Power Distribution Network Restoration Via Feeder Reconfiguration by Using Epso For Losses ReductionDocument5 pagesA Power Distribution Network Restoration Via Feeder Reconfiguration by Using Epso For Losses ReductionMohammed ShifulNo ratings yet
- CIRED2009 0518 PaperDocument4 pagesCIRED2009 0518 PapersrivaishnaviNo ratings yet
- Multiple Distributed Generator Placement in Primary Distribution Networks For Loss ReductionDocument9 pagesMultiple Distributed Generator Placement in Primary Distribution Networks For Loss Reductioniraj214No ratings yet
- Ant Lion Optimizer For Optimum Economic Dispatch Considering Demand Response As A Visual Power PlantDocument16 pagesAnt Lion Optimizer For Optimum Economic Dispatch Considering Demand Response As A Visual Power PlantHakan ÇAMNo ratings yet
- Determination of Optimal Location and Sizing of Distributed Generator in Radial Distribution Systems For Different Types of LoadsDocument23 pagesDetermination of Optimal Location and Sizing of Distributed Generator in Radial Distribution Systems For Different Types of LoadsBatair BerkNo ratings yet
- Samala-Kotapuri2020 Article OptimalAllocationOfDistributedDocument14 pagesSamala-Kotapuri2020 Article OptimalAllocationOfDistributedZainab SattarNo ratings yet
- Nonlinear Structure-Preserving Network Reduction Using Holomorphic EmbeddingDocument10 pagesNonlinear Structure-Preserving Network Reduction Using Holomorphic EmbeddingmoraejNo ratings yet
- IEEE PaperDocument5 pagesIEEE PaperkishorebabNo ratings yet
- Optimal Allocation of Combined DG and Capacitor For Real Power Loss Minimization in Distribution NetworkDocument7 pagesOptimal Allocation of Combined DG and Capacitor For Real Power Loss Minimization in Distribution NetworkSiti Annisa SyalsabilaNo ratings yet
- Reconfiguration and Capacitor Placement For Loss Reduction of Distribution Systems by Ant Colony Search AlgorithmDocument9 pagesReconfiguration and Capacitor Placement For Loss Reduction of Distribution Systems by Ant Colony Search AlgorithmthanatitosNo ratings yet
- Optimal network reconfiguration reduces power lossesDocument16 pagesOptimal network reconfiguration reduces power lossesMarulasiddappa H BNo ratings yet
- A Literature Review of Recent Advances in Optimal Power FlowDocument5 pagesA Literature Review of Recent Advances in Optimal Power FlowInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Optimal Allocation of Distributed Generation in Distribution System For Loss ReductionDocument5 pagesOptimal Allocation of Distributed Generation in Distribution System For Loss ReductionmarchkeithNo ratings yet
- Función Real Base PS Feb 07Document9 pagesFunción Real Base PS Feb 07freddyriveraNo ratings yet
- 33 BusDocument6 pages33 BusShimaaAliNo ratings yet
- DefendDocument12 pagesDefendMAcryan Pacquiao PactolNo ratings yet
- Optimal Capacitor Placement and Sizing in Unbalanced Distribution Systems With Harmonics Consideration Using Particle Swarm OptimizationDocument8 pagesOptimal Capacitor Placement and Sizing in Unbalanced Distribution Systems With Harmonics Consideration Using Particle Swarm OptimizationMohammad HosseiniNo ratings yet
- IEEE Conf Feb2018Document5 pagesIEEE Conf Feb2018Abhishek GuptaNo ratings yet
- Particle Swarm Optimization Based Method For Optimal Siting and Sizing of Multiple Distributed GeneratorsDocument6 pagesParticle Swarm Optimization Based Method For Optimal Siting and Sizing of Multiple Distributed GeneratorsMuhammad ShaarifNo ratings yet
- A Genetic Algorithm For Solving The Optimal Power Flow ProblemDocument15 pagesA Genetic Algorithm For Solving The Optimal Power Flow Problemnirmal_inboxNo ratings yet
- A Genetic Algorithm For Solving The Optimal Power Flow ProblemDocument14 pagesA Genetic Algorithm For Solving The Optimal Power Flow ProblemJoe RanteNo ratings yet
- MyCEP ReportDocument21 pagesMyCEP ReportMuhammad IdreesNo ratings yet
- Optimal Load Balancing and Capacitor Sizing and Siting of An Unbalanced Radial Distribution NetworkDocument6 pagesOptimal Load Balancing and Capacitor Sizing and Siting of An Unbalanced Radial Distribution Networkswapna44No ratings yet
- An Efficient Approach For Capacitor Sizing and Location On A Radial Distribution System Using Artificial Intelligence TechniqueDocument5 pagesAn Efficient Approach For Capacitor Sizing and Location On A Radial Distribution System Using Artificial Intelligence Techniquesahastra244122No ratings yet
- (IJETA-V8I5P8) :simiran Kuwera, Sunil Agarwal, Rajkumar KaushikDocument6 pages(IJETA-V8I5P8) :simiran Kuwera, Sunil Agarwal, Rajkumar KaushikIJETA - EighthSenseGroup100% (1)
- B2 1 PDFDocument10 pagesB2 1 PDFKiranNo ratings yet
- Evolutionary Computing Techniques For Optimal Reactive Power Dispatch: An Overview and Key IssuesDocument5 pagesEvolutionary Computing Techniques For Optimal Reactive Power Dispatch: An Overview and Key IssuessureshNo ratings yet
- Reconfiguration With Simultaneous DG Installation To Improve The Voltage Profile in Distribution Network Using Harmony Search AlgorithmDocument12 pagesReconfiguration With Simultaneous DG Installation To Improve The Voltage Profile in Distribution Network Using Harmony Search AlgorithmLava KumarNo ratings yet
- Shrawane 2015Document6 pagesShrawane 2015Rodrigo Possidonio NoronhaNo ratings yet
- Iijee 2014 12 20 5Document6 pagesIijee 2014 12 20 5International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Distributed Generation Location and Size Determination To Reduce Power Losses of A Distribution Feeder by Firefly AlgorithmDocument12 pagesDistributed Generation Location and Size Determination To Reduce Power Losses of A Distribution Feeder by Firefly AlgorithmMarioTorresCruzNo ratings yet
- Q-Problem Sequential: (1) (Or Cost)Document7 pagesQ-Problem Sequential: (1) (Or Cost)Ankur MaheshwariNo ratings yet
- Optimal Sizing and Sitting of Distributed Generations in Power Distribution Networks Using Firefly AlgorithmDocument14 pagesOptimal Sizing and Sitting of Distributed Generations in Power Distribution Networks Using Firefly AlgorithmAkansha SnehaNo ratings yet
- Project ProposalDocument4 pagesProject ProposalRajesh AwalNo ratings yet
- Optimal Power Flow Using Genetic AlgorithmDocument10 pagesOptimal Power Flow Using Genetic AlgorithmS Bharadwaj ReddyNo ratings yet
- A Genetic Based Algorithm For Loss Reduction in Distribution SystemsDocument7 pagesA Genetic Based Algorithm For Loss Reduction in Distribution SystemskartikeyasarmaNo ratings yet
- Problem On Overloaded Phases Can HaveDocument13 pagesProblem On Overloaded Phases Can HaveJean-nette BarlisanNo ratings yet
- Optimal Distributed Generation Siting and Sizing by Considering Harmonic Limits Using SLPSODocument6 pagesOptimal Distributed Generation Siting and Sizing by Considering Harmonic Limits Using SLPSOIJLRESNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- 8 - Optimal Placement of DG PDFDocument7 pages8 - Optimal Placement of DG PDFNour KobiNo ratings yet
- Weekly Report OFMDocument2 pagesWeekly Report OFMKnyotNo ratings yet
- An Integrated Algorithm Based On Artificial Bee Colony and PSODocument5 pagesAn Integrated Algorithm Based On Artificial Bee Colony and PSOKnyotNo ratings yet
- ABC Algorithm Numerical Function 2007Document13 pagesABC Algorithm Numerical Function 2007shanthisecNo ratings yet
- Allocation of Optimal Distributed Generation Using GA For Minimum System Losses in Radial Distribution Networks PDFDocument13 pagesAllocation of Optimal Distributed Generation Using GA For Minimum System Losses in Radial Distribution Networks PDFKnyotNo ratings yet
- SE 276B Syllabus Winter 2018Document2 pagesSE 276B Syllabus Winter 2018Manu VegaNo ratings yet
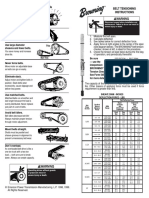
- Browning Belt Tension GaugeDocument2 pagesBrowning Belt Tension GaugeJasperken2xNo ratings yet
- DesignDocument2 pagesDesignAmr AbdalhNo ratings yet
- Growth, Stagnation or Decline? Agfficulturalproductm'Iy in British IndiaDocument290 pagesGrowth, Stagnation or Decline? Agfficulturalproductm'Iy in British IndiaHarshadeep BiswasNo ratings yet
- Manual Bot With Relay CircuitDocument4 pagesManual Bot With Relay CircuitKarishma MishraNo ratings yet
- Quest The Last RemnantDocument67 pagesQuest The Last Remnantding suheNo ratings yet
- Jean NouvelDocument1 pageJean Nouvelc.sioson.540553No ratings yet
- The Practical Welding EngineerDocument154 pagesThe Practical Welding EngineerMohamed Atef0% (1)
- Algebra 1 FINAL EXAM REVIEW 2Document2 pagesAlgebra 1 FINAL EXAM REVIEW 2Makala DarwoodNo ratings yet
- Problem Set 3_Cross-Text ConnectionDocument31 pagesProblem Set 3_Cross-Text Connectiontrinhdat11012010No ratings yet
- SilverDocument16 pagesSilversharma_shruti0% (1)
- El Anatsui - TransformationsDocument15 pagesEl Anatsui - TransformationsReece BriceNo ratings yet
- Ac+lic Lab Manual 2018-19Document76 pagesAc+lic Lab Manual 2018-19Samanvi SaatviNo ratings yet
- Mitsubishi Colt 2007 Rear AxleDocument2 pagesMitsubishi Colt 2007 Rear AxlenalokinNo ratings yet
- Catalog INSIZE - Instrumente de MasuraDocument32 pagesCatalog INSIZE - Instrumente de MasuraSculegero0% (1)
- Melese Hotel ST ReportDocument74 pagesMelese Hotel ST ReportKidist MollaNo ratings yet
- Lmx2370/Lmx2371/Lmx2372 Pllatinum Dual Frequency Synthesizer For RF Personal CommunicationsDocument16 pagesLmx2370/Lmx2371/Lmx2372 Pllatinum Dual Frequency Synthesizer For RF Personal Communications40818248No ratings yet
- LEEA-036 (B) - Academy ITS Practical Training Courses Jan - June 2020 Version 1 October 2019Document18 pagesLEEA-036 (B) - Academy ITS Practical Training Courses Jan - June 2020 Version 1 October 2019kaito kurabaNo ratings yet
- MIND - BODY RelationshipDocument18 pagesMIND - BODY RelationshipvishwabhashaNo ratings yet
- What Is The Kingdom of GodDocument10 pagesWhat Is The Kingdom of GodSunil ChelladuraiNo ratings yet
- Vitamin and Mineral Contents of Gongronema Latifolium LeavesDocument3 pagesVitamin and Mineral Contents of Gongronema Latifolium LeavesFrida Febriani IsnanisafitriNo ratings yet
- 978 613 8 91055 8 PDFDocument309 pages978 613 8 91055 8 PDFEr Sayan ParamanikNo ratings yet
- Calculation of Carbon Footprint: HouseDocument3 pagesCalculation of Carbon Footprint: HouseUmut ÇağırganNo ratings yet
- Commsec - Co Profile - 20150521Document14 pagesCommsec - Co Profile - 20150521Muhammad Nisar KhanNo ratings yet
- Solvent Extraction: Please Submit Question 4 For MarkingDocument3 pagesSolvent Extraction: Please Submit Question 4 For MarkingThembi Matebula100% (1)
- Anatomy of A Plated HoleDocument5 pagesAnatomy of A Plated Holepbs0707No ratings yet